Rovinný pohyb¶
V kinematice se převážně vyjadřují závislosti vektorů polohy \(\boldsymbol{r}\), rychlosti \(\boldsymbol{v}\) a zrychlení bodu \(\boldsymbol{a}\) v polárních souřadnicích \((r,\varphi)\). Parametr \(r\) reprezentuje vzdálenost bodu od počátku souřadnic a \(\varphi\) reprezentuje úhel, zpravidla odečítaný proti směru hodinových ručiček od vodorovné osy roviny. Pro případ obecného rovinného (nejen) pohybu je to totiž velmi praktické. Pro fajnšmekry jsou v následujícím textíku odvozeny fundamentální vztahy pro vektory \(\boldsymbol{r}\), \(\boldsymbol{v}\) a \(\boldsymbol{a}\) v polárních souřadnicích pro rovinný pohyb.
Základní vlastnosti bázových vektorů polárního souřadnicového systému¶
Předpokládáme funkční závislosti souřadnic
na parametru \(t\in\mathbb{R}\). Parametr \(t\) je reálný, většinou kladný a čas reprezentující. Veličiny \(r\in[0,\infty]\) a \(\varphi\in[0,2\pi]\) jsou polární souřadnice nějakého rádius vektoru bodu
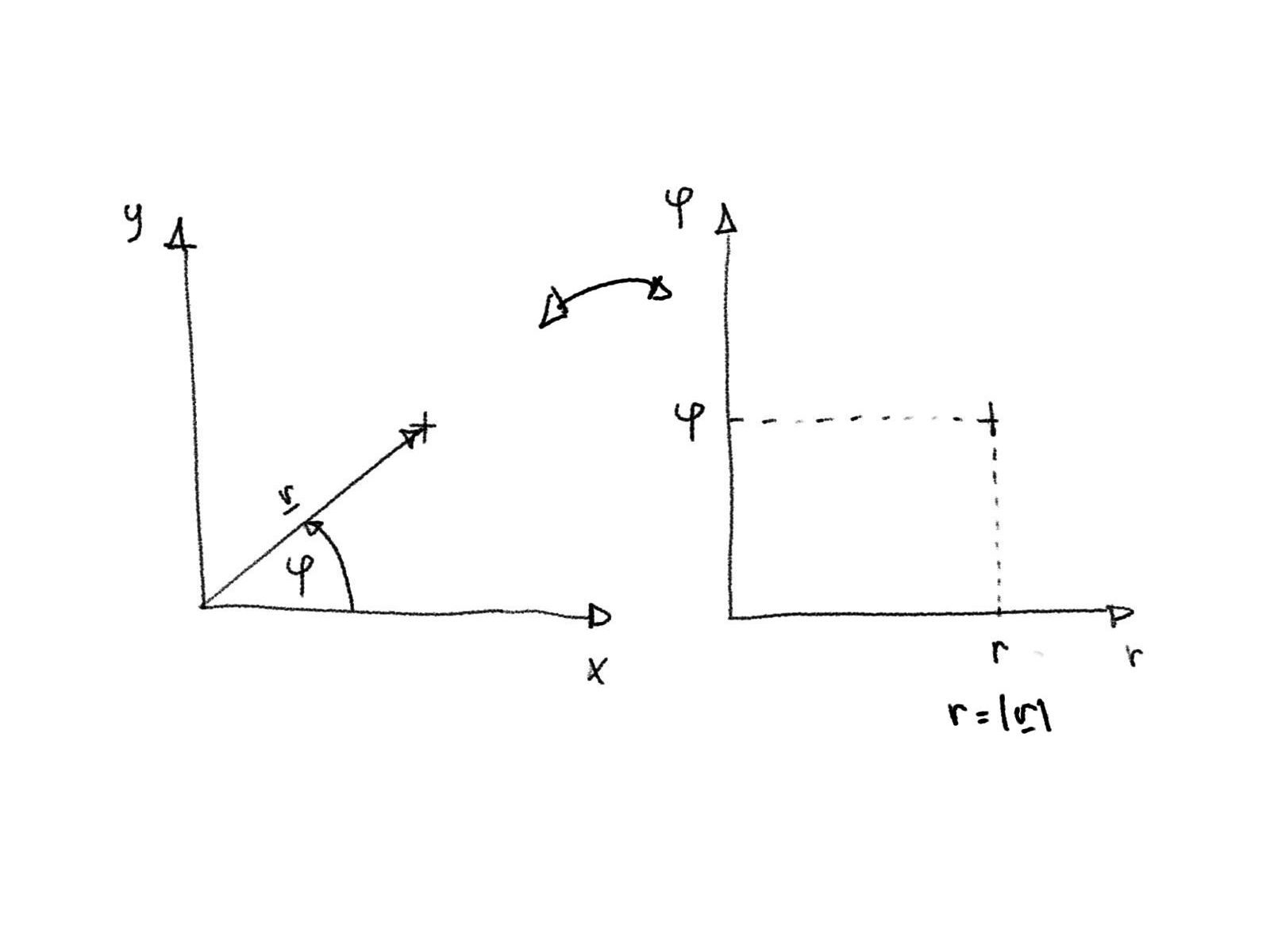
Obrázek: Zobrazení bodu v kartézském \((x,y)\) a polárním \((r,\varphi)\) souřadnicovém systému.¶
Jednotkové vektory \(\boldsymbol{e}_{r}\) a \(\boldsymbol{e}_{\varphi}\) jsou bázové vektory polárního souřadnicového systému \((r,\varphi)\), pro které platí
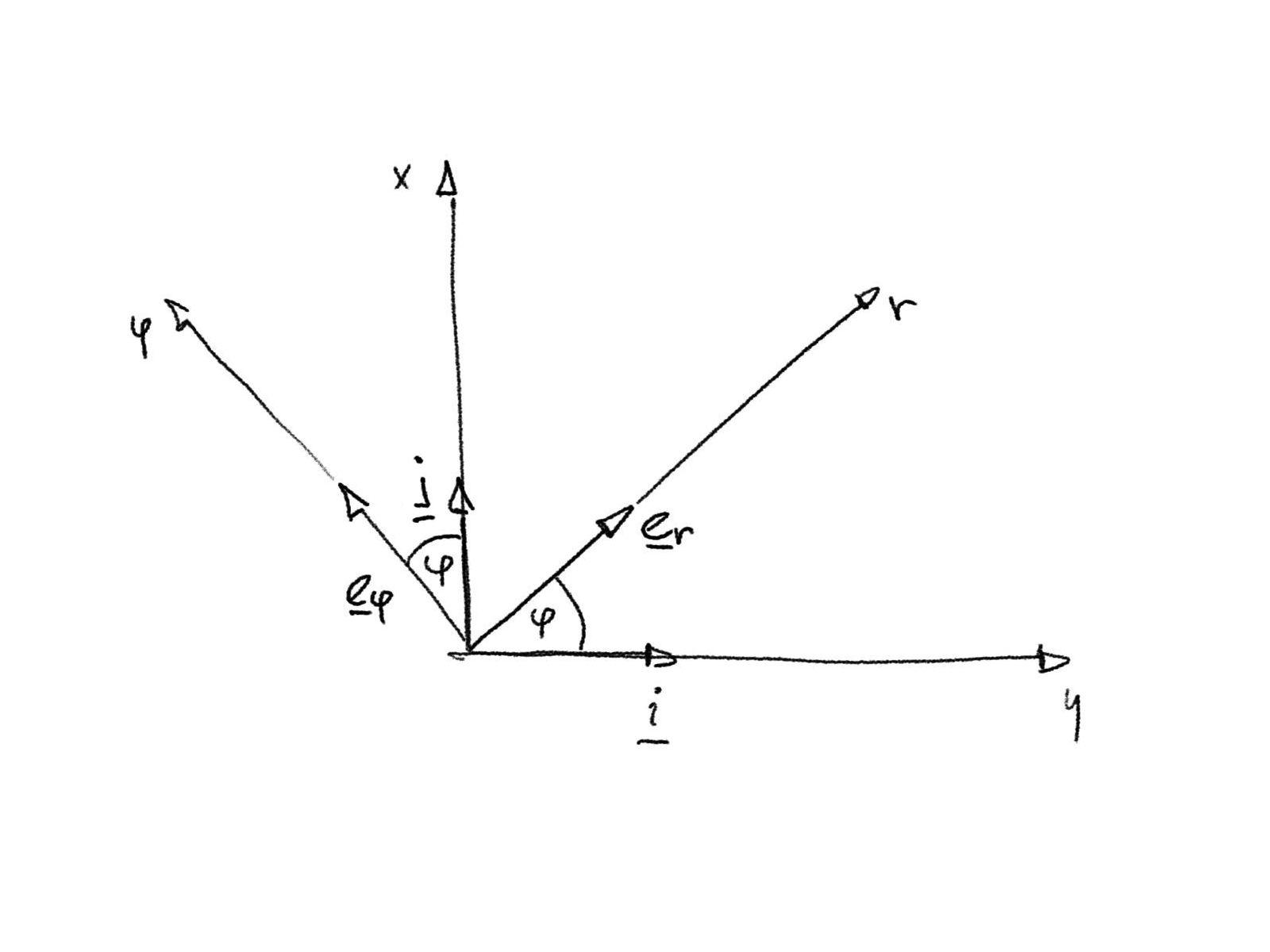
Obrázek: Bázové vektory \(\boldsymbol{e}_r\) a \(\boldsymbol{e}_\varphi\) polárního souřadnicového systému \((r,\varphi)\) a jejich vztah k bázovým vektorům \(\boldsymbol{i}\) a \(\boldsymbol{j}\) kartézského souřadnicového systému \((x,y)\).¶
Derivace podle parametru \(t\) souřadnic \(r\) a \(\varphi\) značíme v kinematice následovně
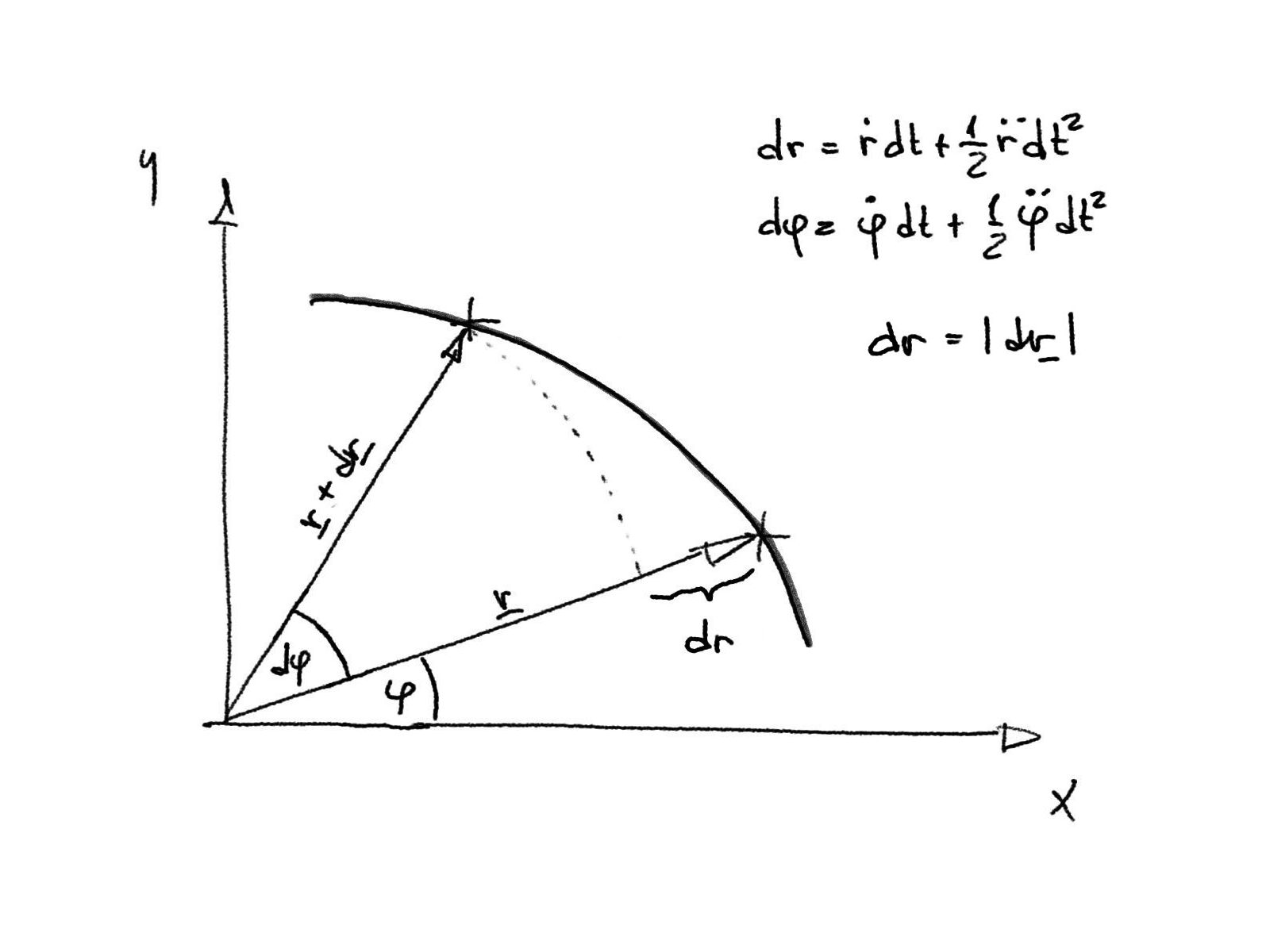
Obrázek: Geometrický význam derivace velikosti rádius vektoru \(|\boldsymbol{r}|\equiv r\) a úhlu \(\varphi\) podle parametru (času) \(t\).¶
Fyzikální význam \(v\) a \(a\) je rychlost a zrychlení přímočarého pohybu bodu a význam \(\omega\) a \(\alpha\) je úhlová rychlost a zrychlení při rotačním pohybu rádius vektoru bodu \(\boldsymbol{r}\). Pro derivace jednotkových vektorů \(\boldsymbol{e}_{r}\) a \(\boldsymbol{e}_{\varphi}\) podle parametru \(t\) platí
Jednotkové vektory \(\boldsymbol{e}_{r}\) a \(\boldsymbol{e}_{\varphi}\) se nemohou zkracovat nebo prodlužovat, mohou se však (v čase \(t\)) natáčet, což právě tyto vztahy říkají.
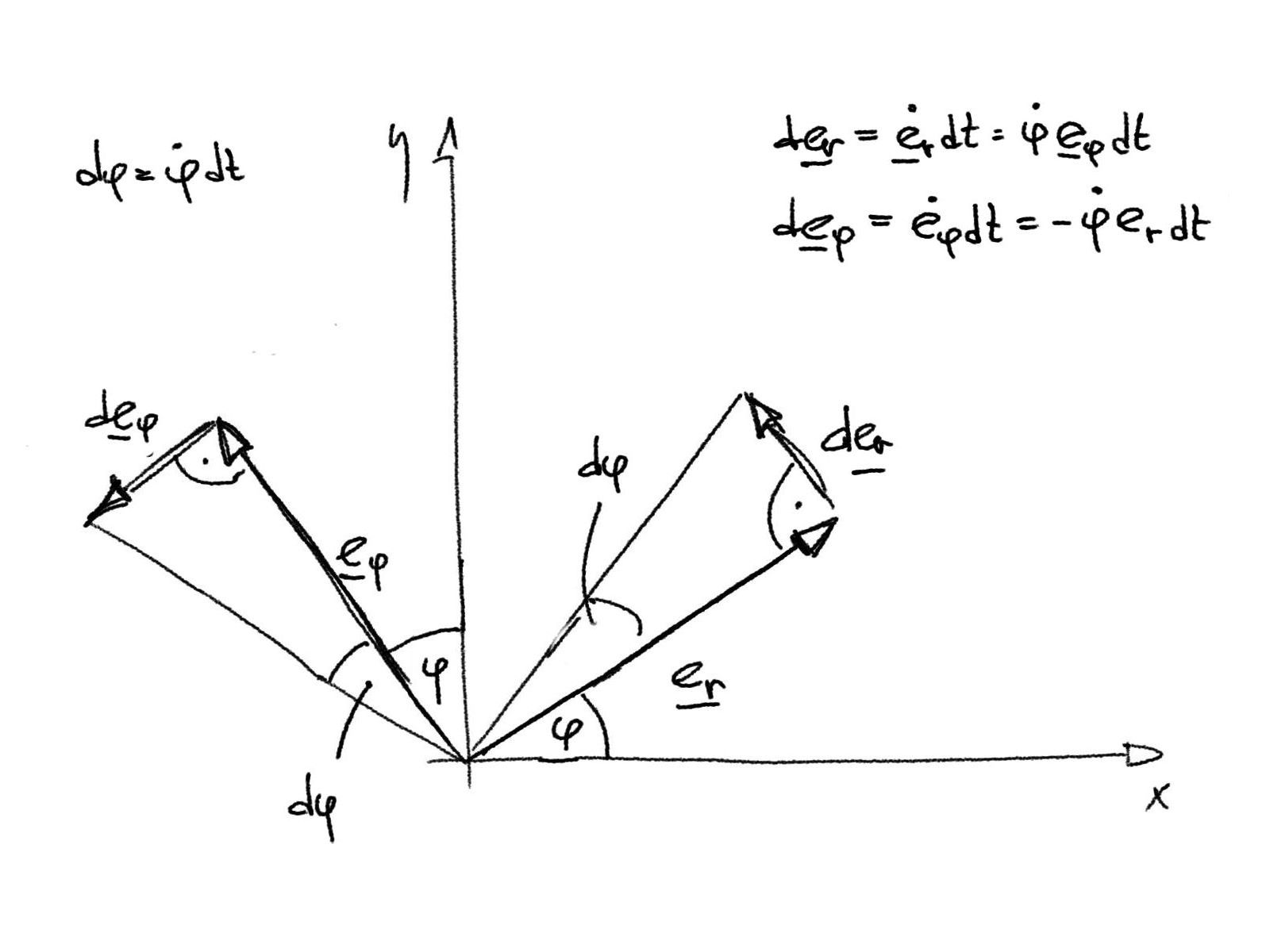
Obrázek: Geometrický význam derivace bázových vektorů \(\boldsymbol{e}_r\) a \(\boldsymbol{e}_\varphi\) polárního souřadnicového systému \((r,\varphi)\) podle parametru (času) \(t\).¶
Přímočarý pohyb¶
U přípmočarého pohybu se předpokládá, že se rádius vektor \(\boldsymbol{r}\) bodu v zafixovaném směru prodlužuje nebo zkracuje, tedy
Takže
a
Rádius vektor \(\boldsymbol{r}\) bodu v polárních souřadnicích \((r,\varphi)\) se zpravila volí tak (není to nutné, ale velmi výhodné), že leží na ose \(r\) polárního souřadnicového systému, tj.
Pak tedy pro vektor rychlosti \(\boldsymbol{v}\) a zrychlení \(\boldsymbol{a}\) bodu platí
Význam \(v\) a \(a\) je, jak je uvedeno výše, rychlost a zrychlení přímočarého pohybu bodu.
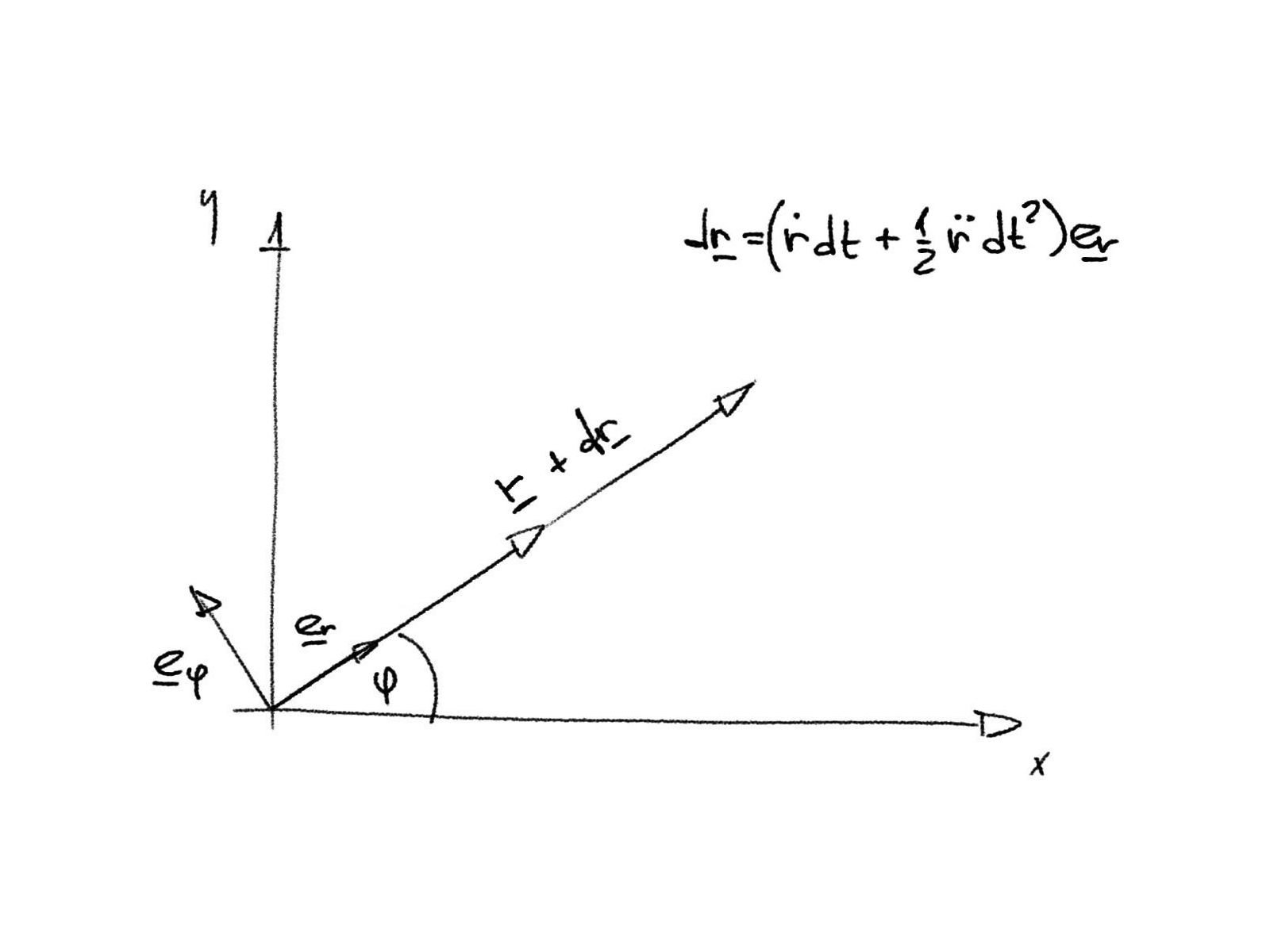
Obrázek: Geometrický význam jednotlivých přírůstků polohy bodu v polárním souřadnicovém systému \((r,\varphi)\) od rychlosti \(v=\dot{r}\) a zrychlení \(a=\ddot{r}\) při přímočarém pohybu.¶
Rotační pohyb¶
U rotačního pohybu předpokládáme, že se rádius vektor bodu \(\boldsymbol{r}\) neprodlužuje, ale rotuje kolem počátku souřadnic, tj.
Takže platí jediná podmínka
Rádius vektor \(\boldsymbol{r}\) nějakého bodu v polárním souřadnicovém systému se i zde výhodně volí tak, že leží na ose \(r\) souřadnicového systému, tj.
Pak platí
Vektor
je obvodová rychlost bodu a vektory
jsou tečné a normálové (dostředivé) zrychlením bodu.
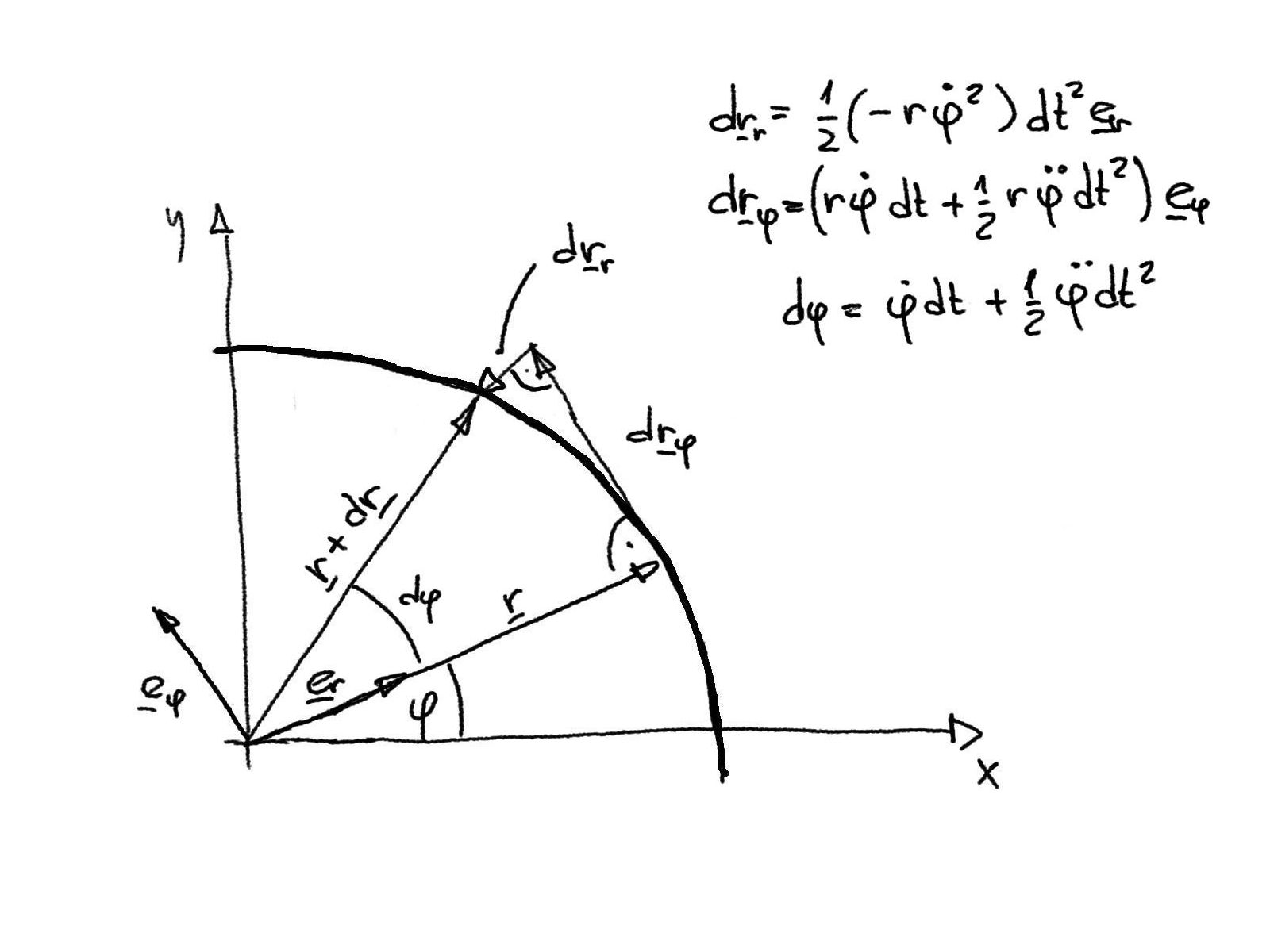
Obrázek: Geometrický význam jednotlivých přírůstků polohy bodu v polárním souřadnicovém systému \((r,\varphi)\) od rychlosti \(\dot{\varphi}r=\omega r\) a tečného zrychlení \(a_t=\ddot{\varphi}r=\alpha r\) a normálového zrychlení \(a_n=\dot{\varphi}^2r=\omega^2r\) při rotačním pohybu bodu.¶
Rovinný pohyb¶
V obecném případu rovinného pohybu se na rádius \(r\) a úhel \(\varphi\) nekladou žádné požadavky, tj.
a podobně jako v případě translačního a rotačního pohybu se rádius vektor bodu \(\boldsymbol{r}\) v polárních souřadnicích \((r,\varphi)\) zpravila volí tak, že
Pak pro rychlost bodu \(\boldsymbol{v}\) platí
To znamená, že vektor rychlosti \(\boldsymbol{v}\) je vektorovým součtem rychlosti translačního pohybu \(v\boldsymbol{e}_{r}\) a vektoru obvodové rychlosti \(r\omega\boldsymbol{e}_{\varphi}\). Pro zrychlení platí
Vektor zrychlení \(\boldsymbol{a}\) bodu, podobně jako vektor jeho rychlosti \(\boldsymbol{v}\), je kombinací vektorů zrychlení přímočarého pohybu, tečného zrychlení a dostředivého zrychlení \(a\boldsymbol{e}_{r}\), \(a_{t}\boldsymbol{e}_{\varphi}\) a \(a_{n}\boldsymbol{e}_{r}\). Navíc se zde objevuje vektor tzv. Coriolisova zrychlení
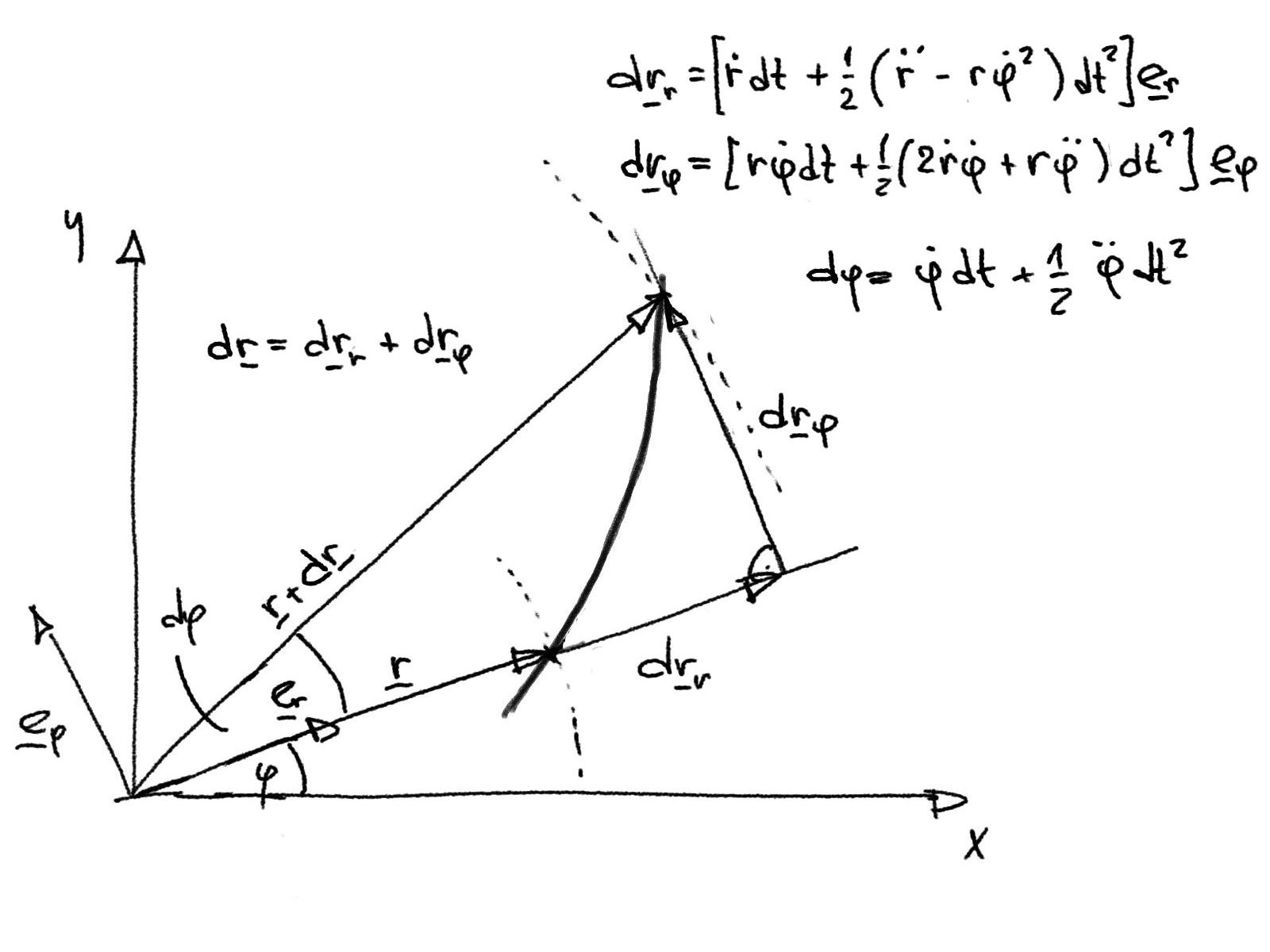
Obrázek: Geometrický význam jednotlivých přírůstků polohy bodu v polárním souřadnicovém systému \((r,\varphi)\) od rychlostí \(\dot{r}\) a \(\dot{\varphi}r=\omega r\), tečného zrychlení \(a_t=\ddot{\varphi}r=\alpha r\), normálového zrychlení \(a_n=\dot{\varphi}^2r=\omega^2r\) a Coriolisova zrychlení \(a_c=2\dot{\varphi}\dot{r}\) při obecném pohybu bodu v rovině.¶