Výuka¶
BKP Projekt¶
Má snad někdo dojem, že být Bakalářem je procházka rajskou zahradou? Zlatý voči! Je to život plný ústrků, ponižování a bezpráví, Kočka by svých devět životů za tenhle jeden mizerný nevyměnila. Jednoduše řečeno, je to život pod Psa. Více zde, teda pardon, támhle níž:
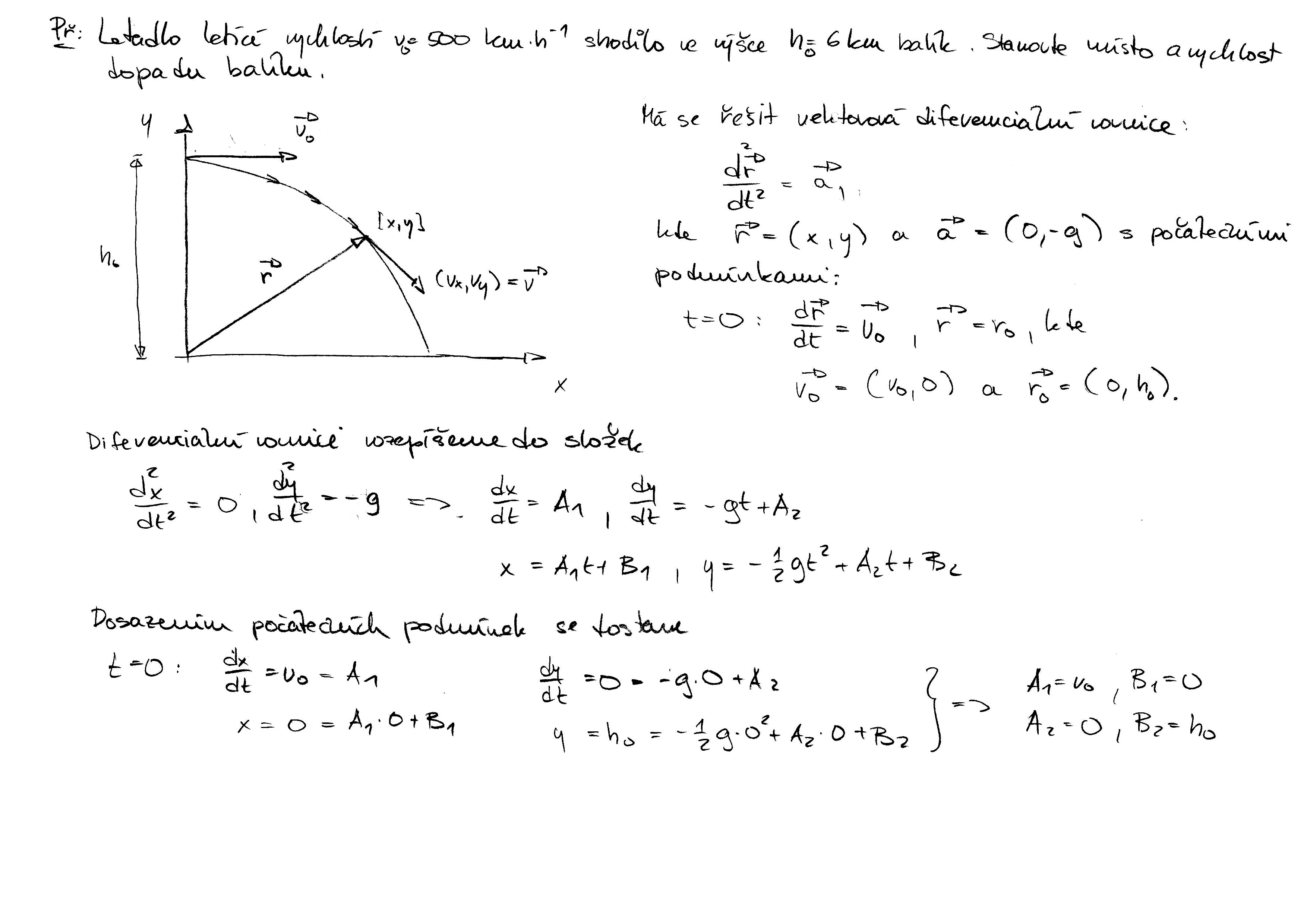
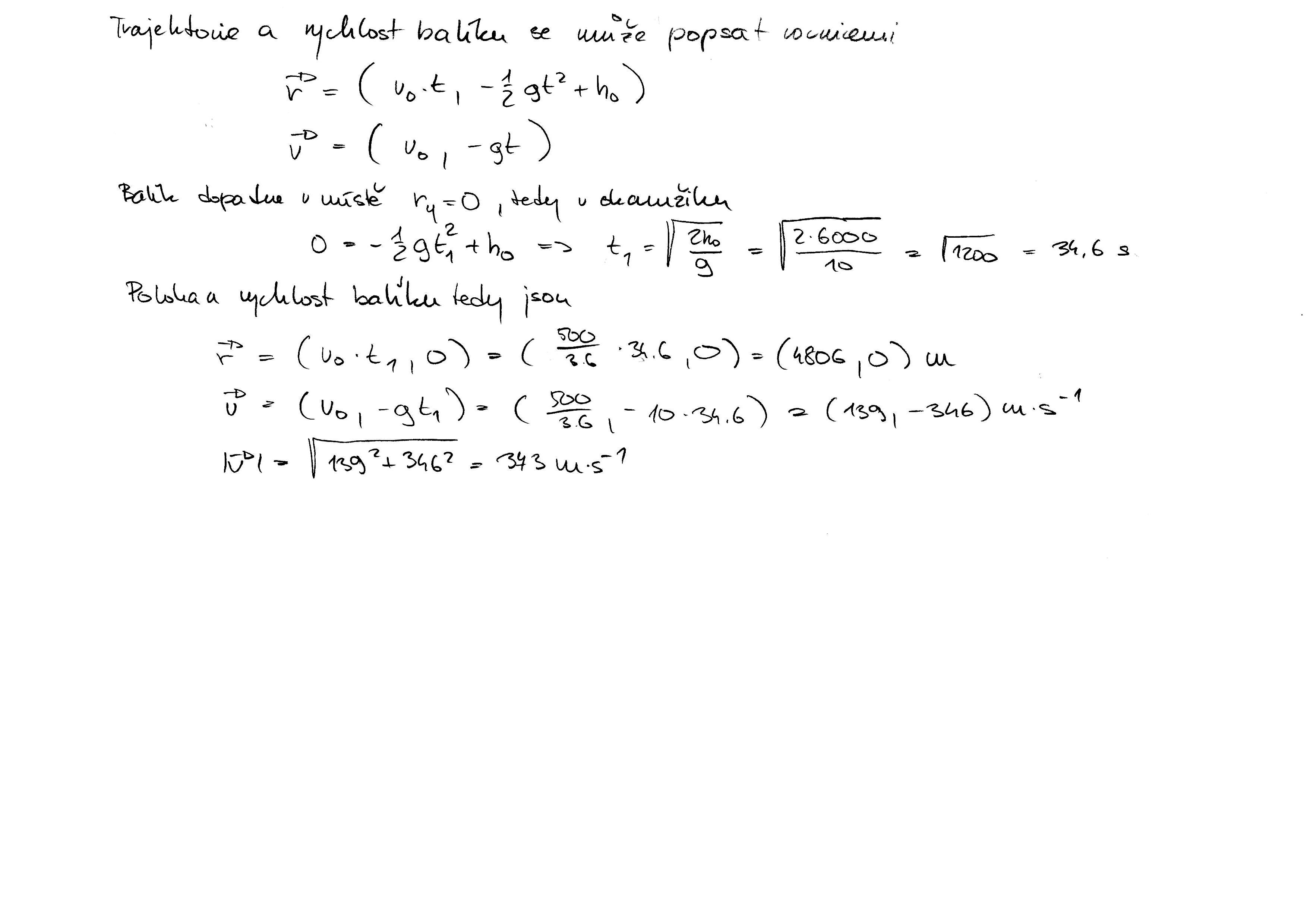
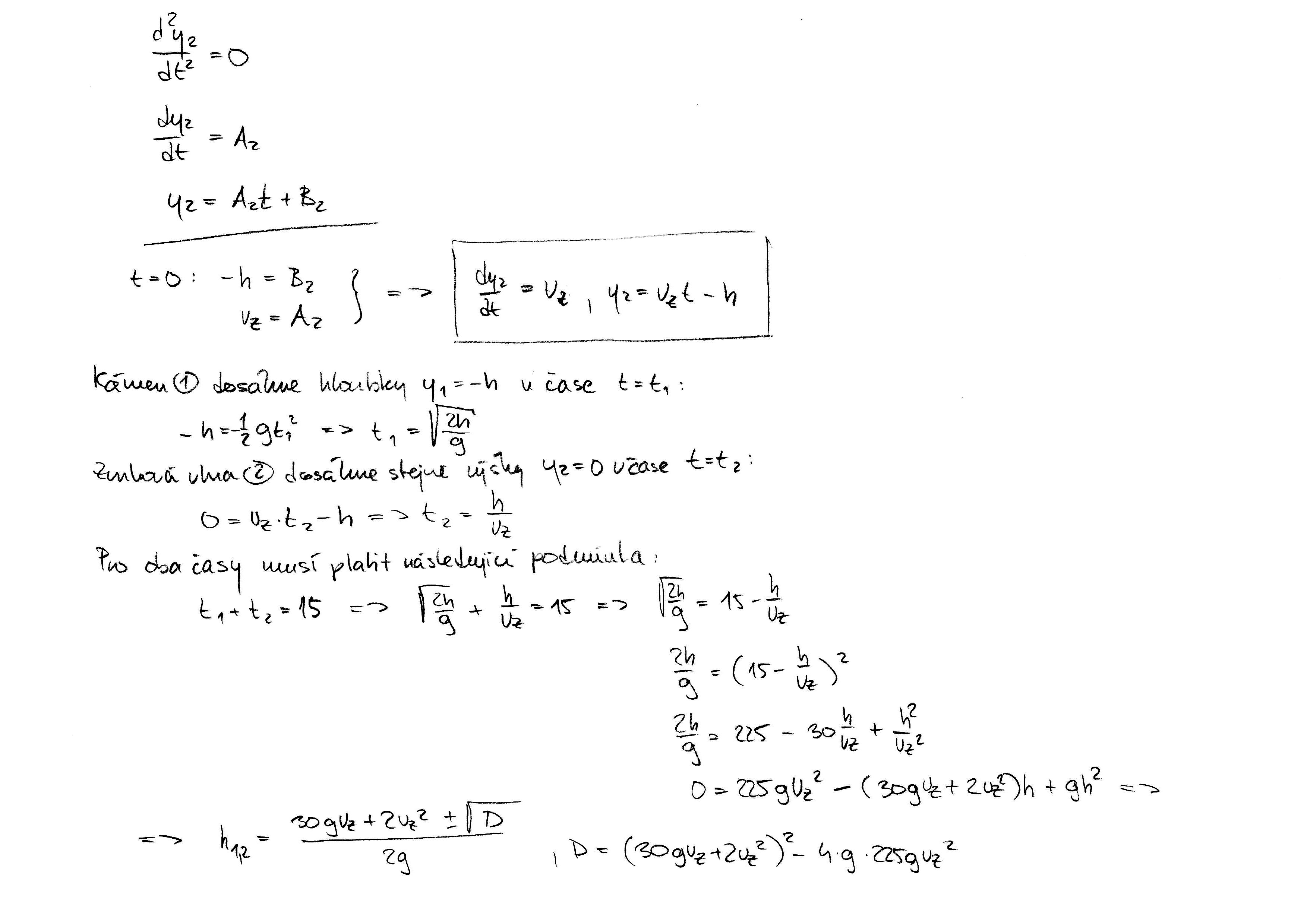
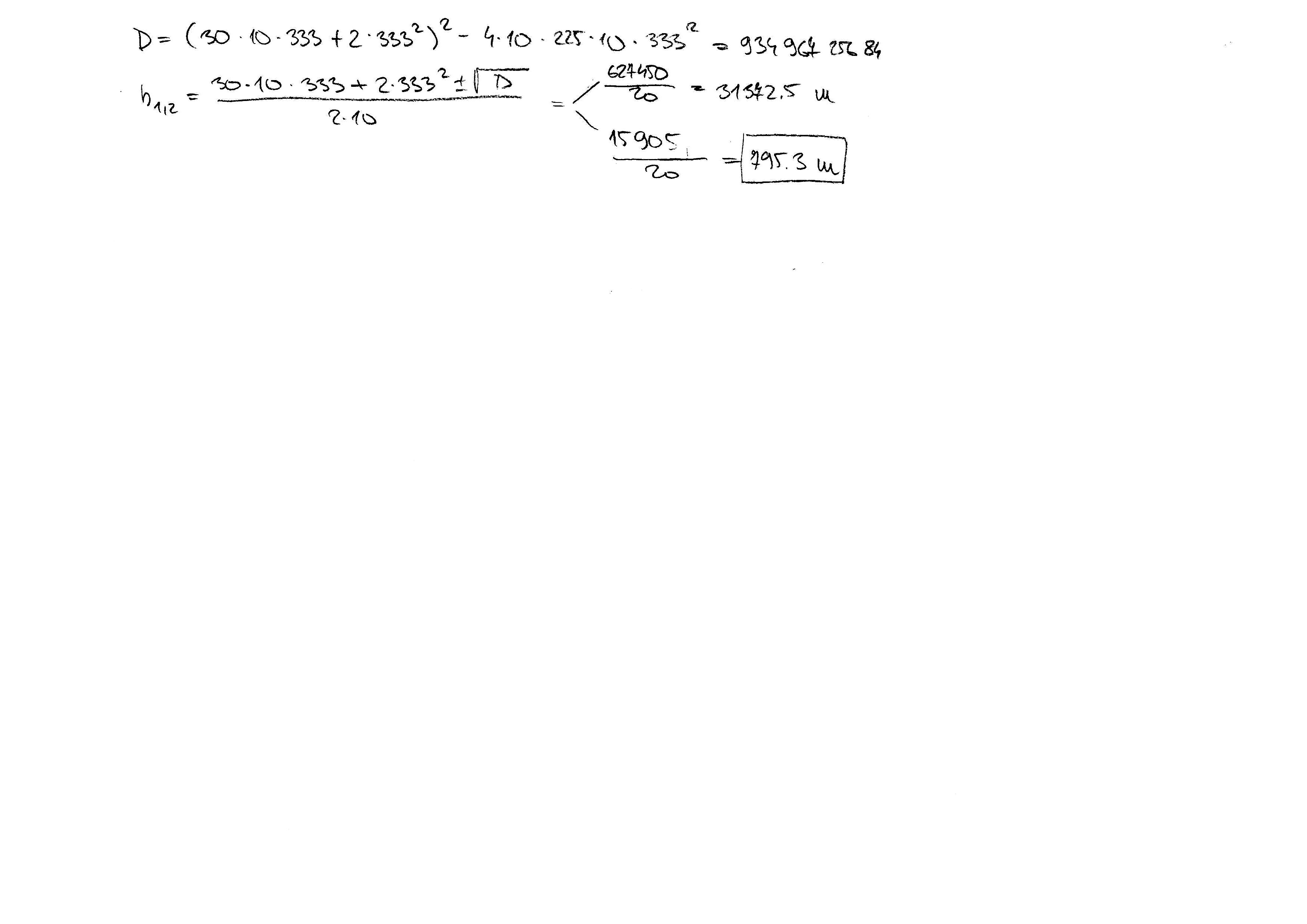
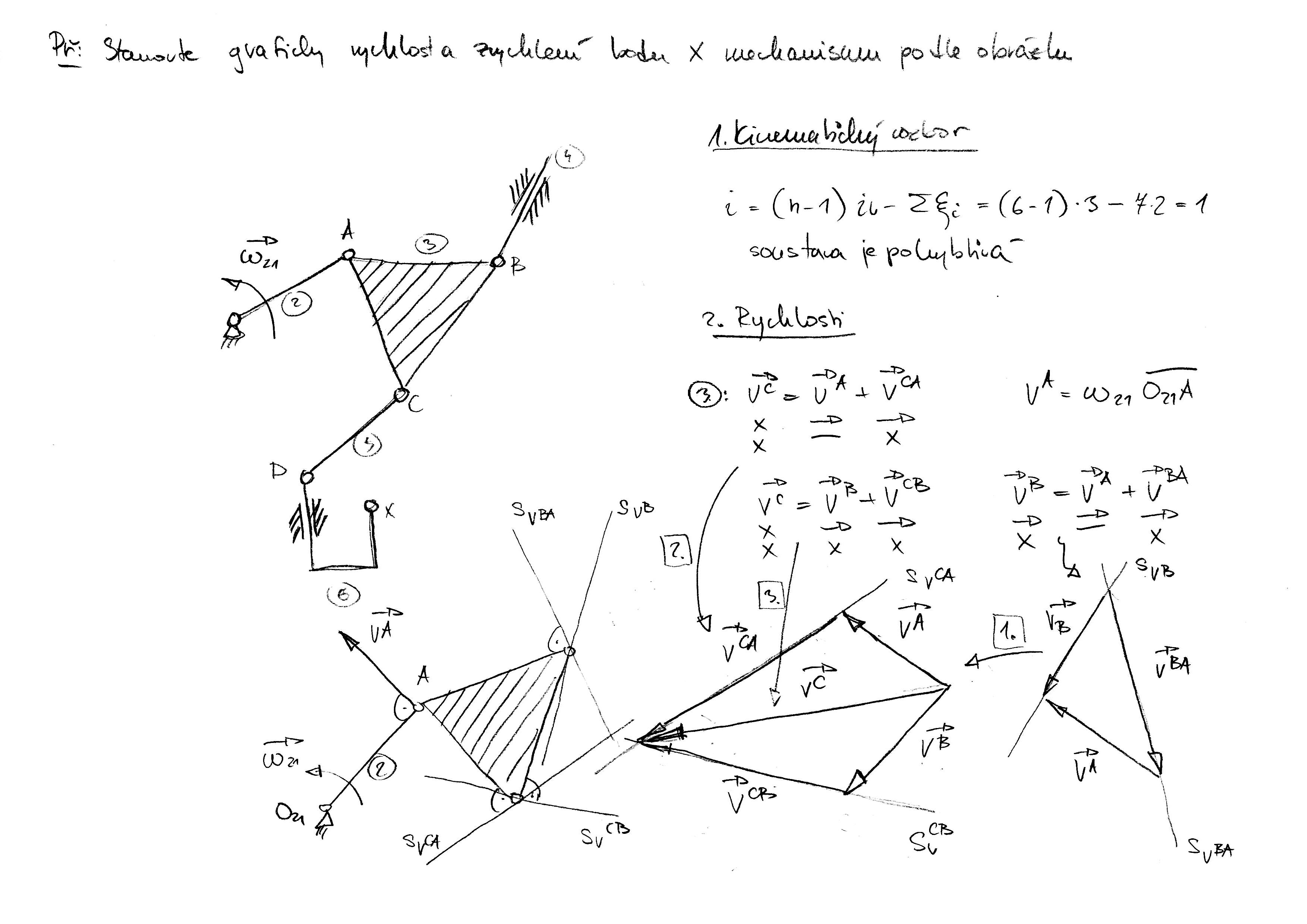
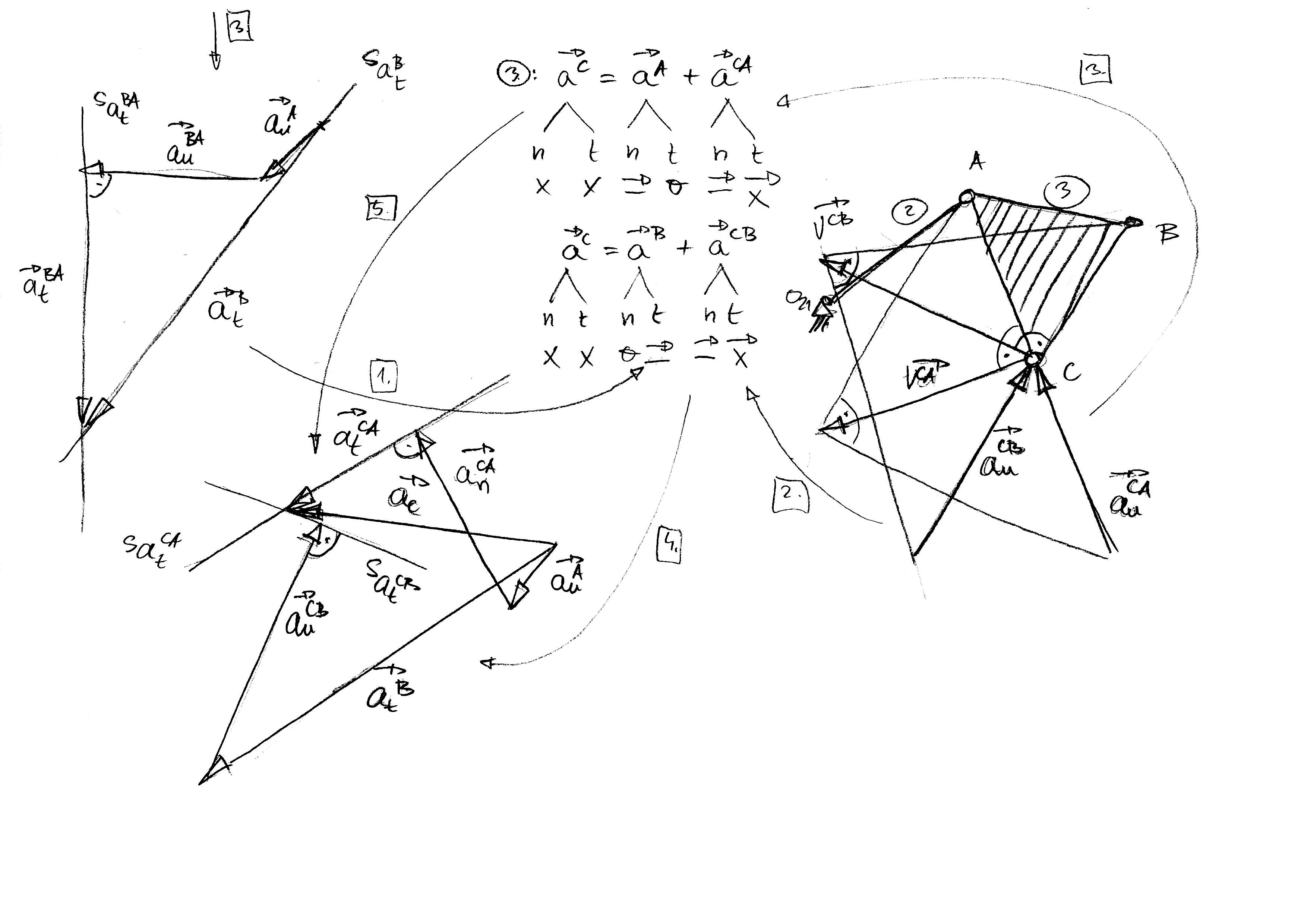
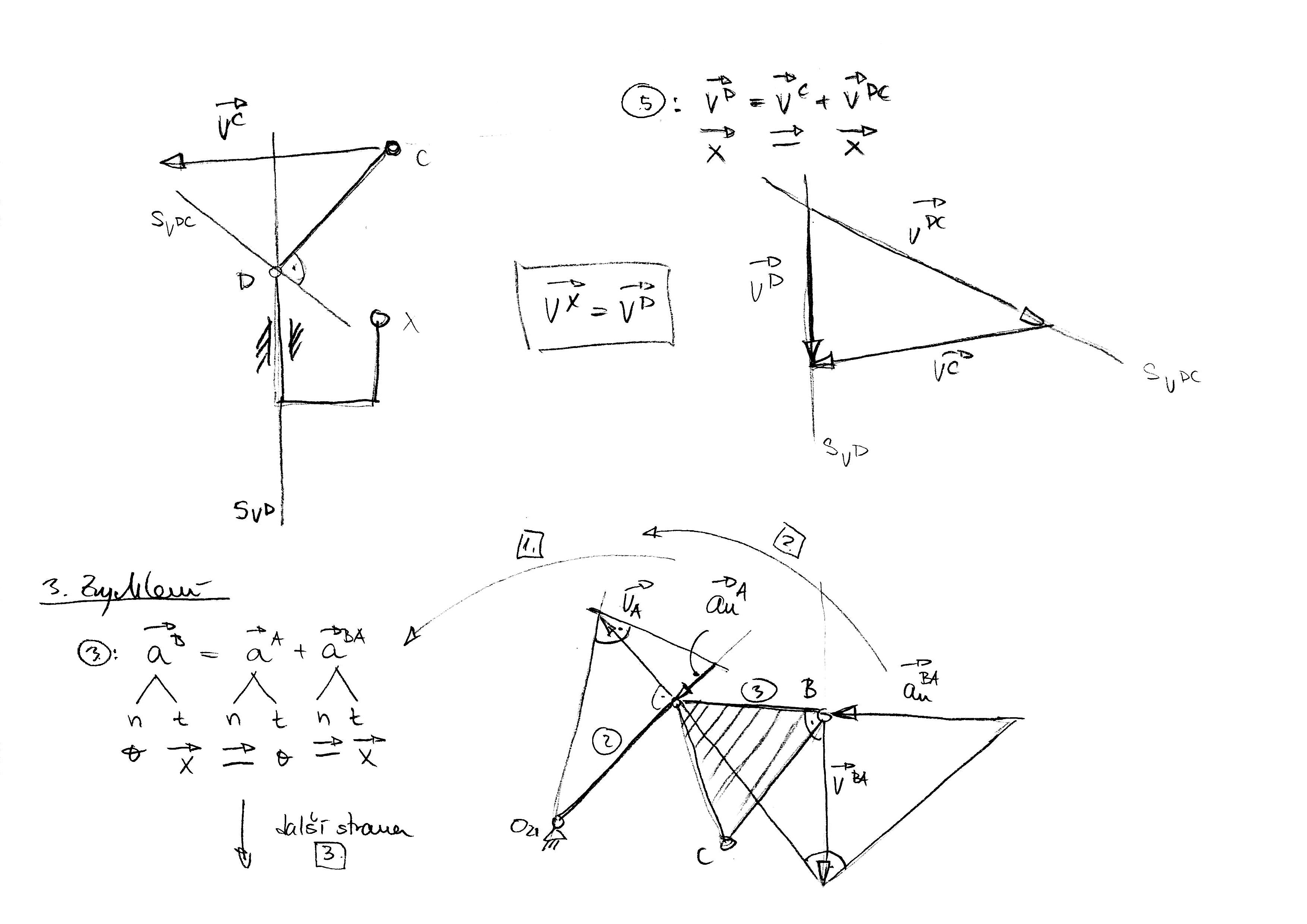
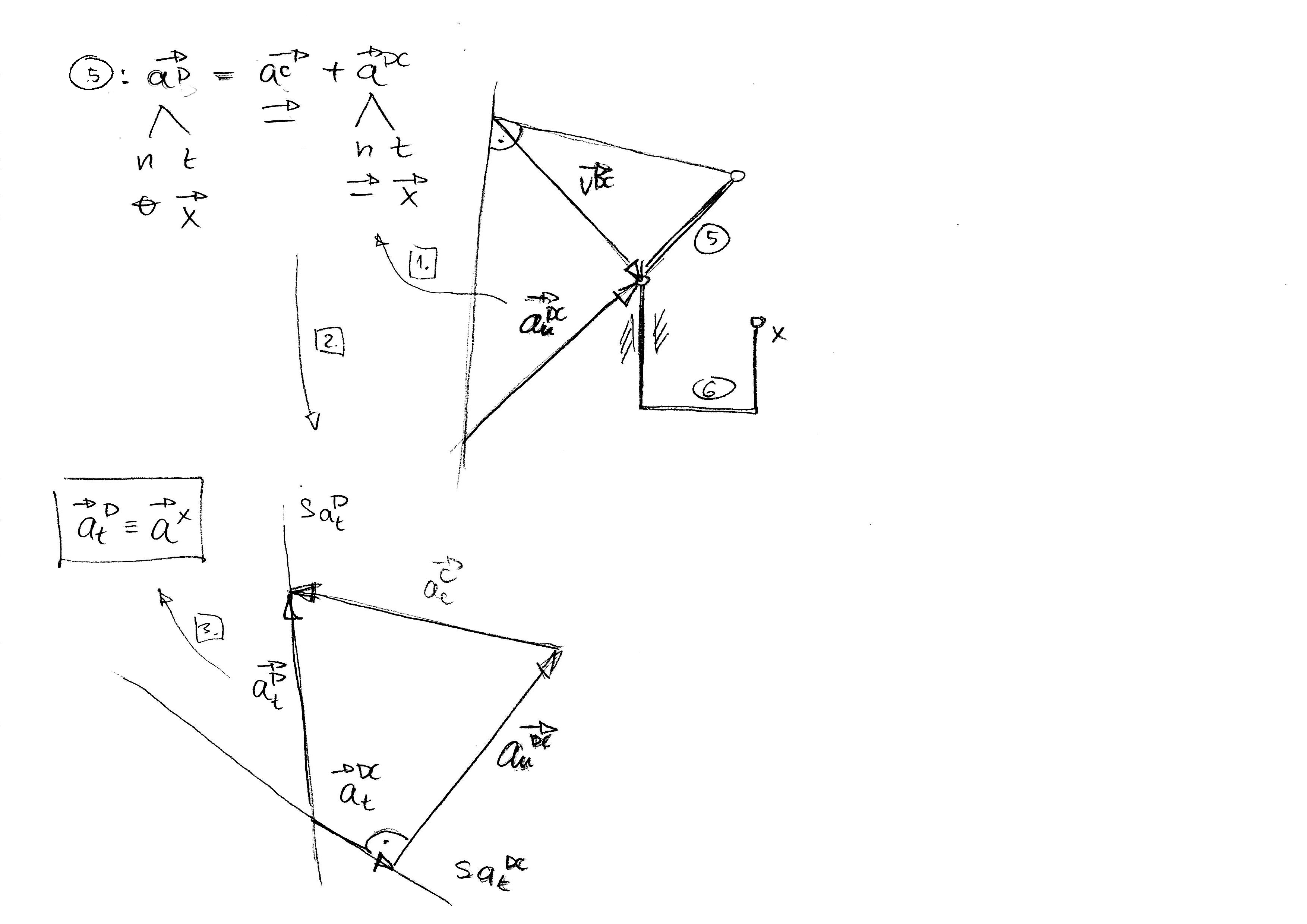
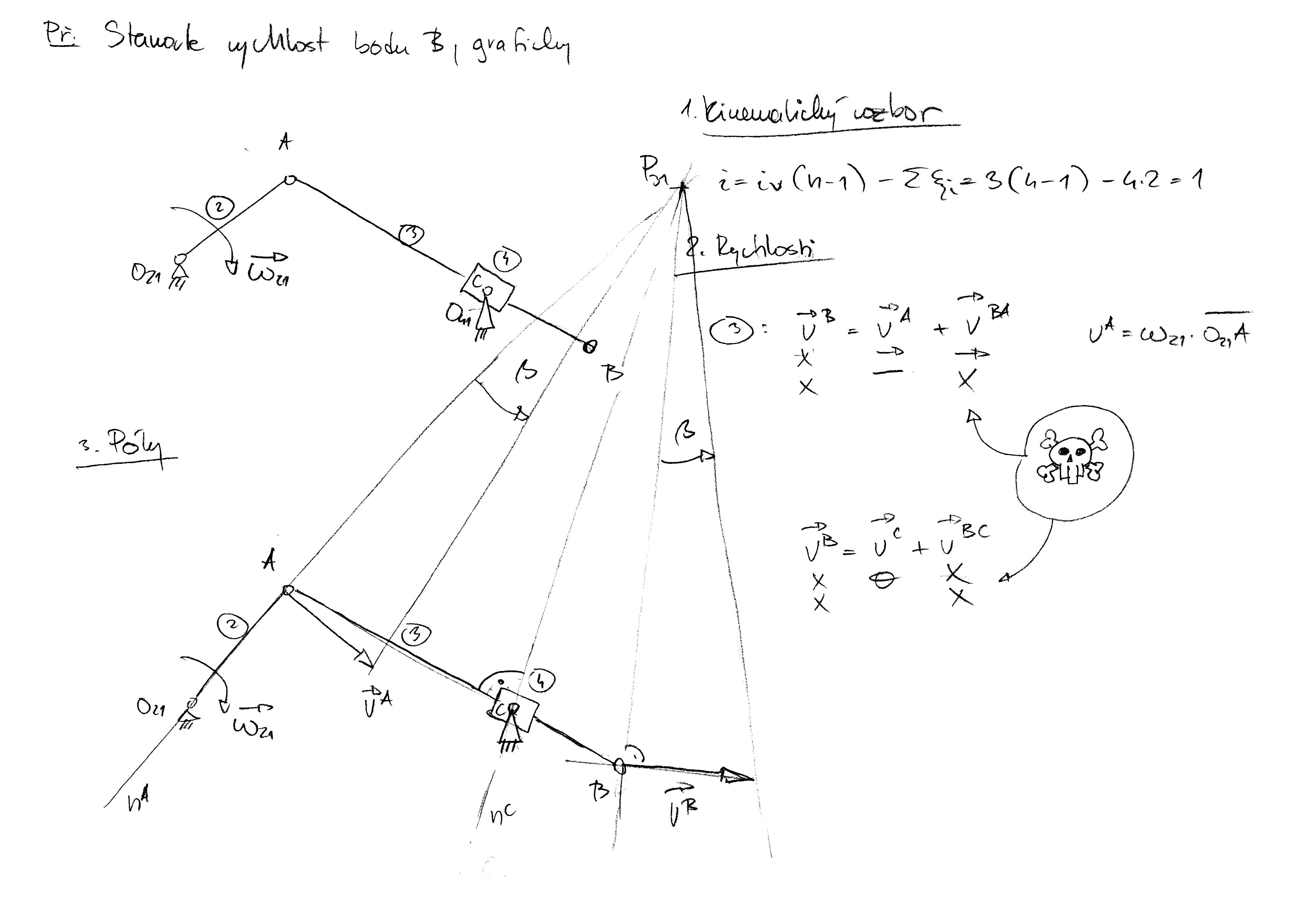
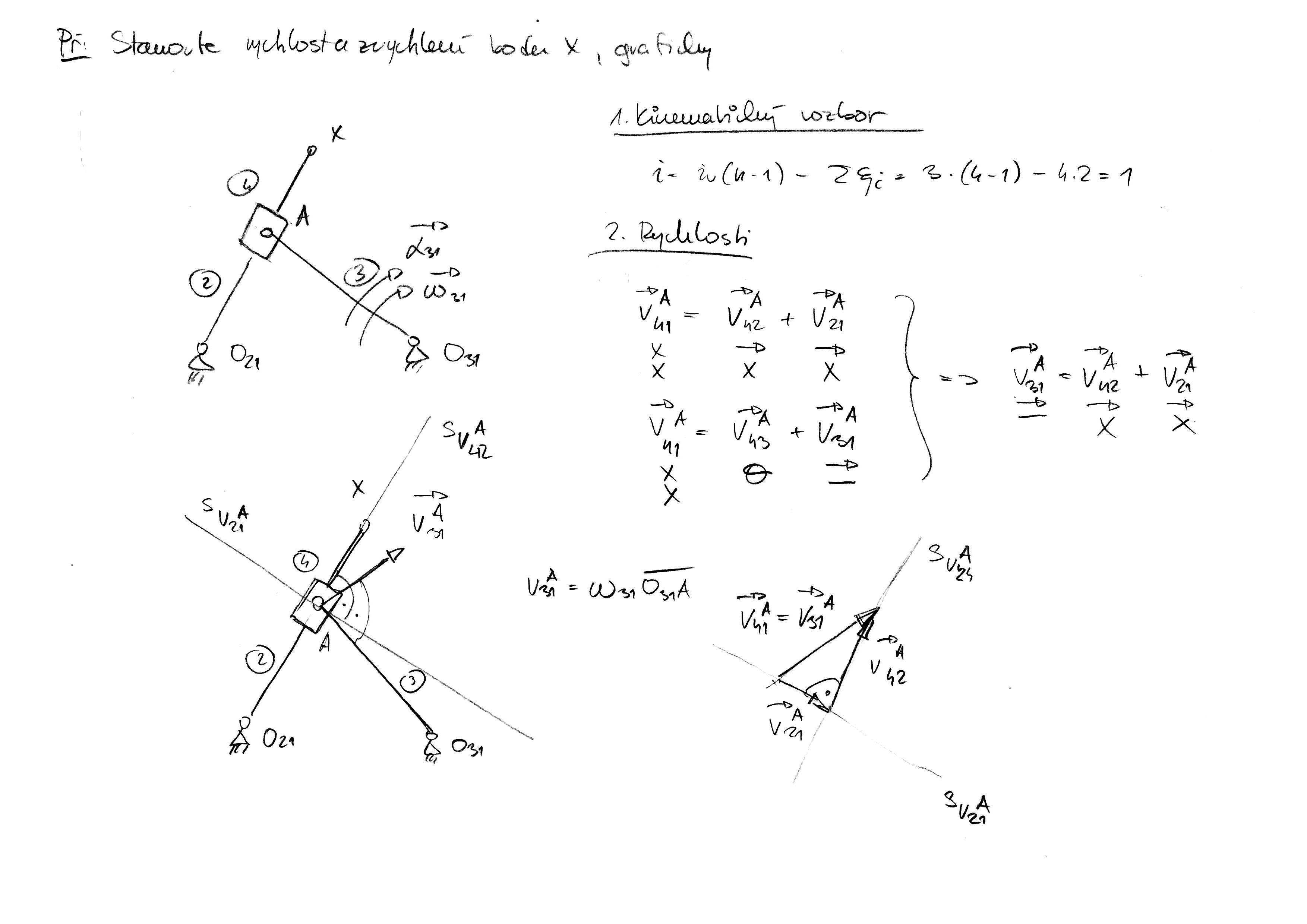
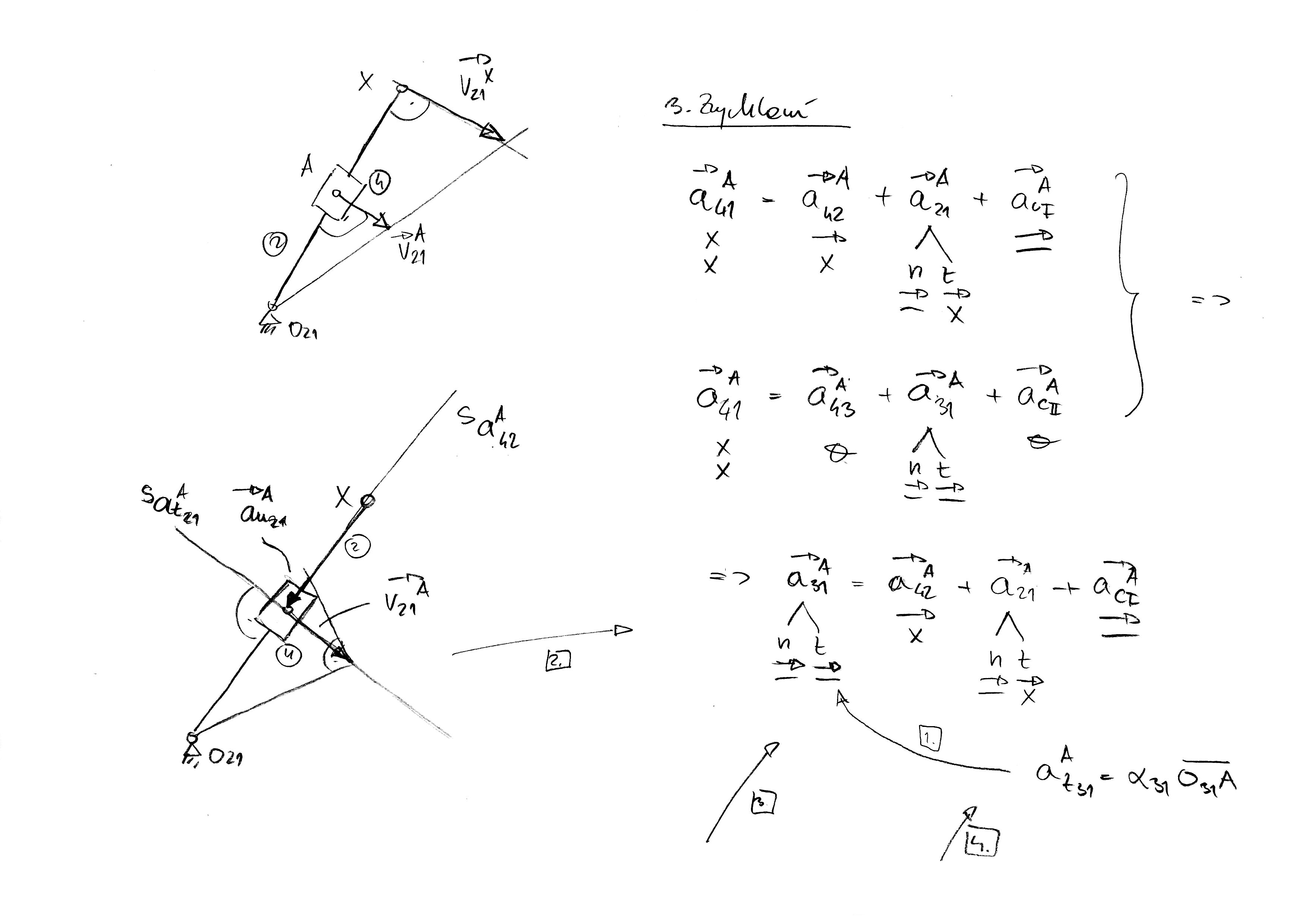
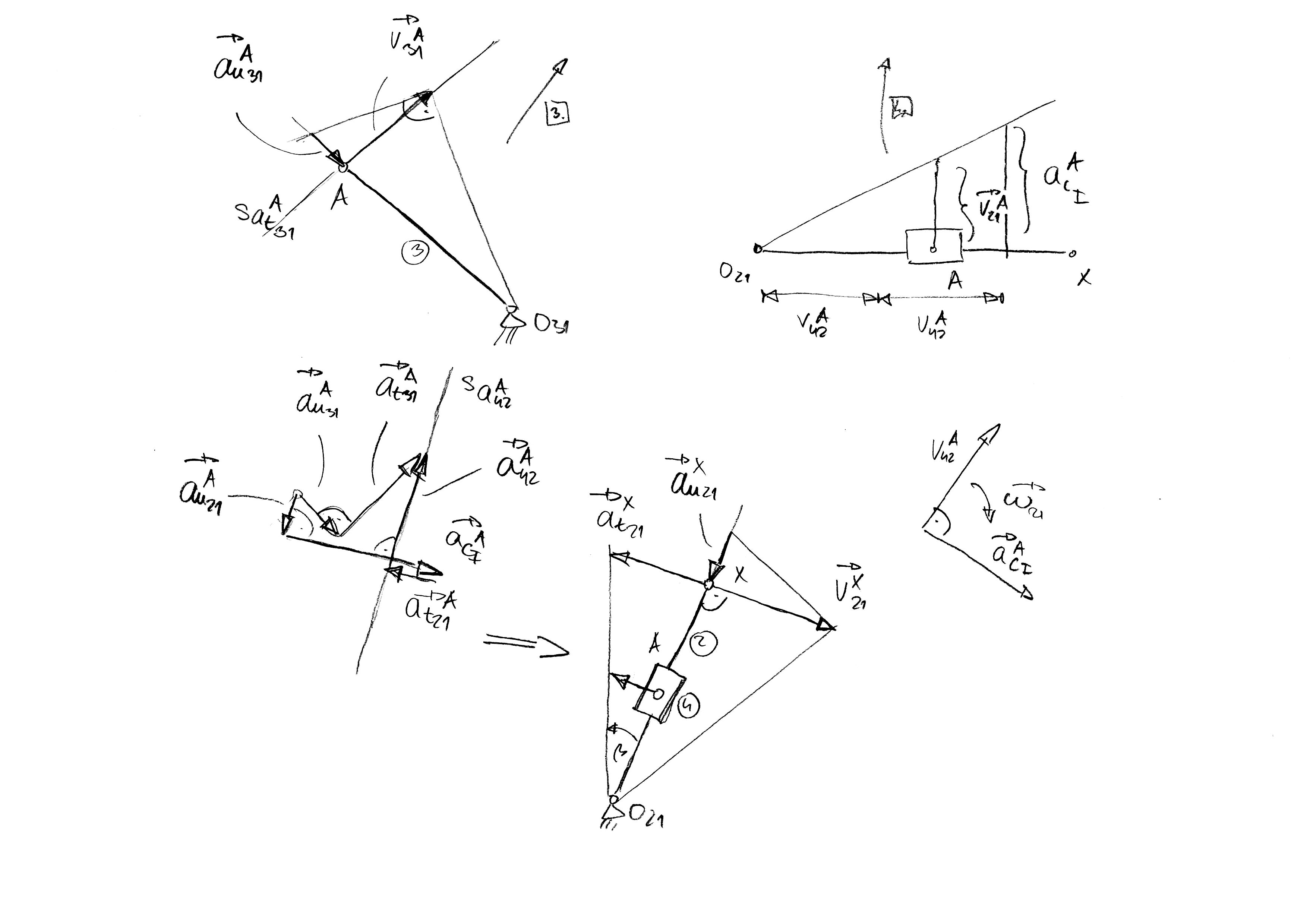
Kinematika¶
Poznámka: Na vlastní nebezpečí, zvýšené riziko mozkové příhody.
Pro zájemce poznámka na téma Rovinný pohyb
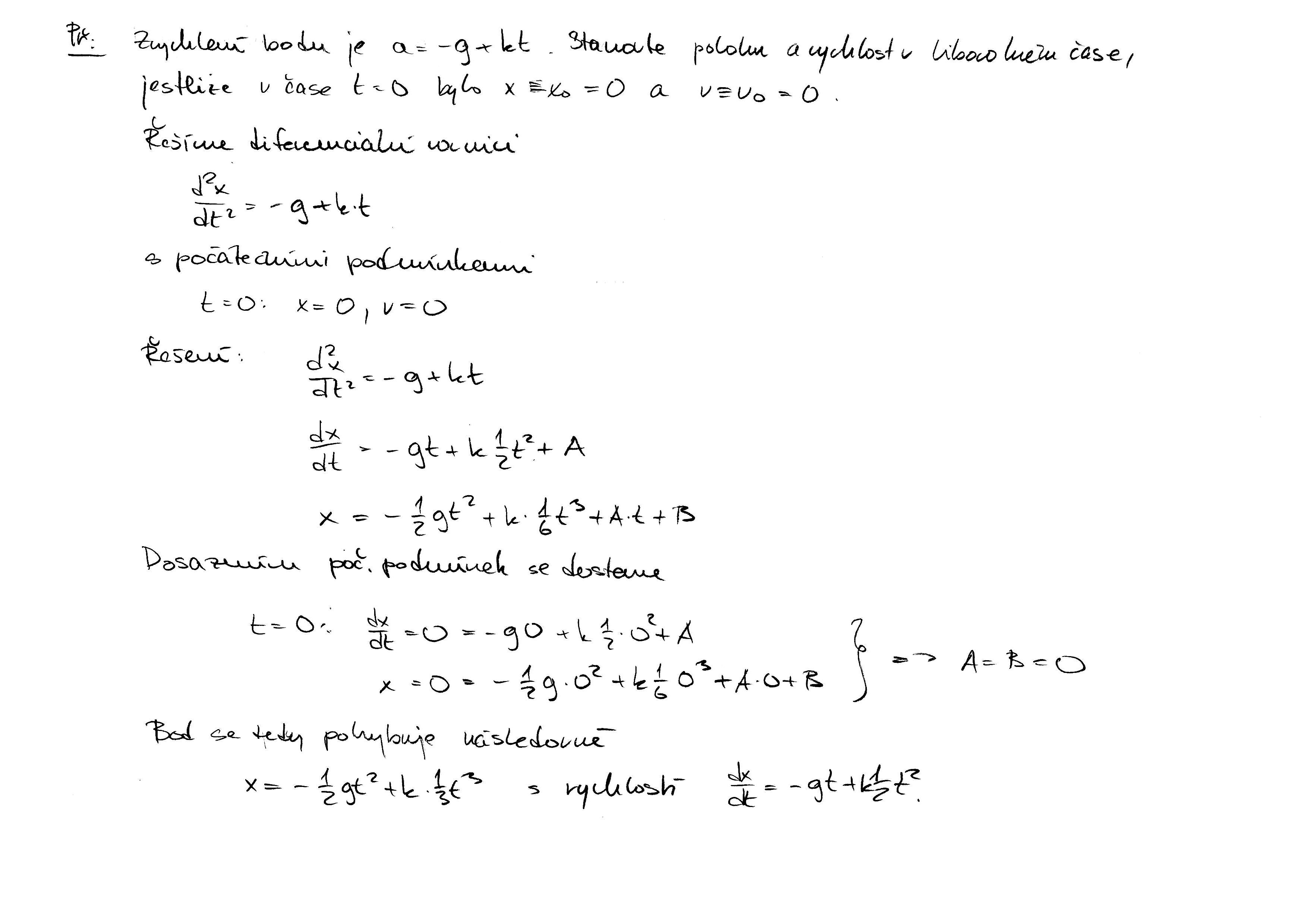
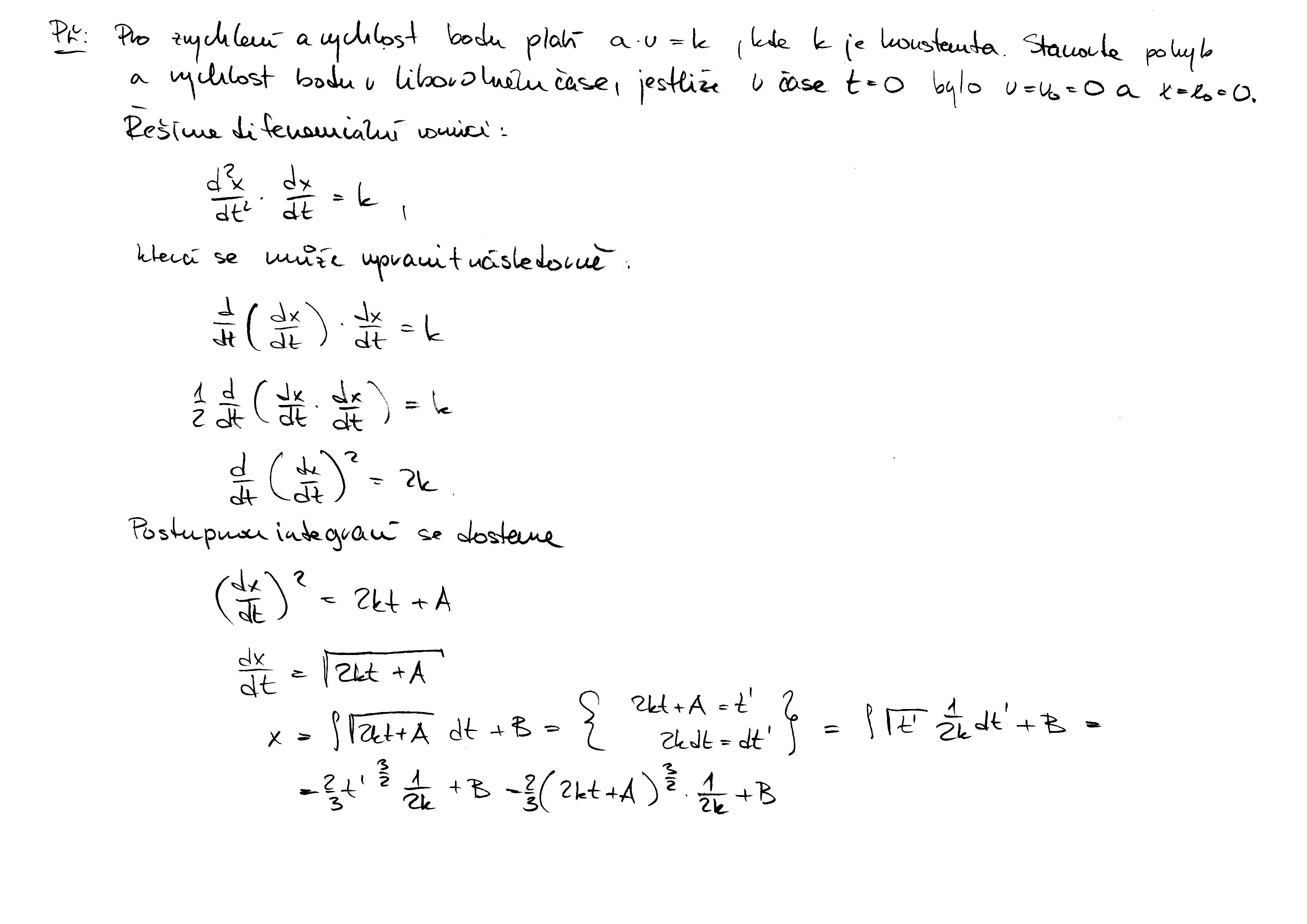
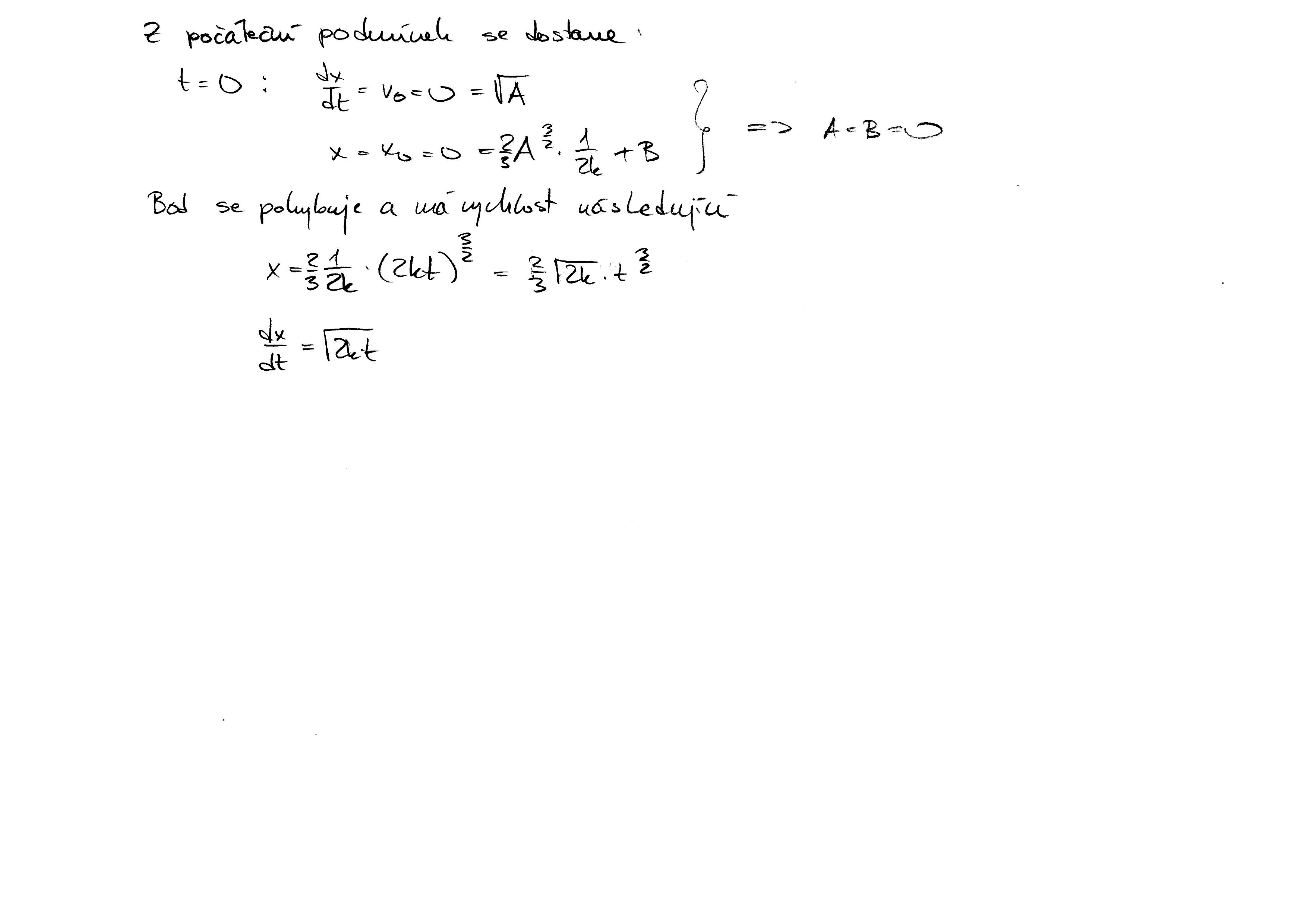
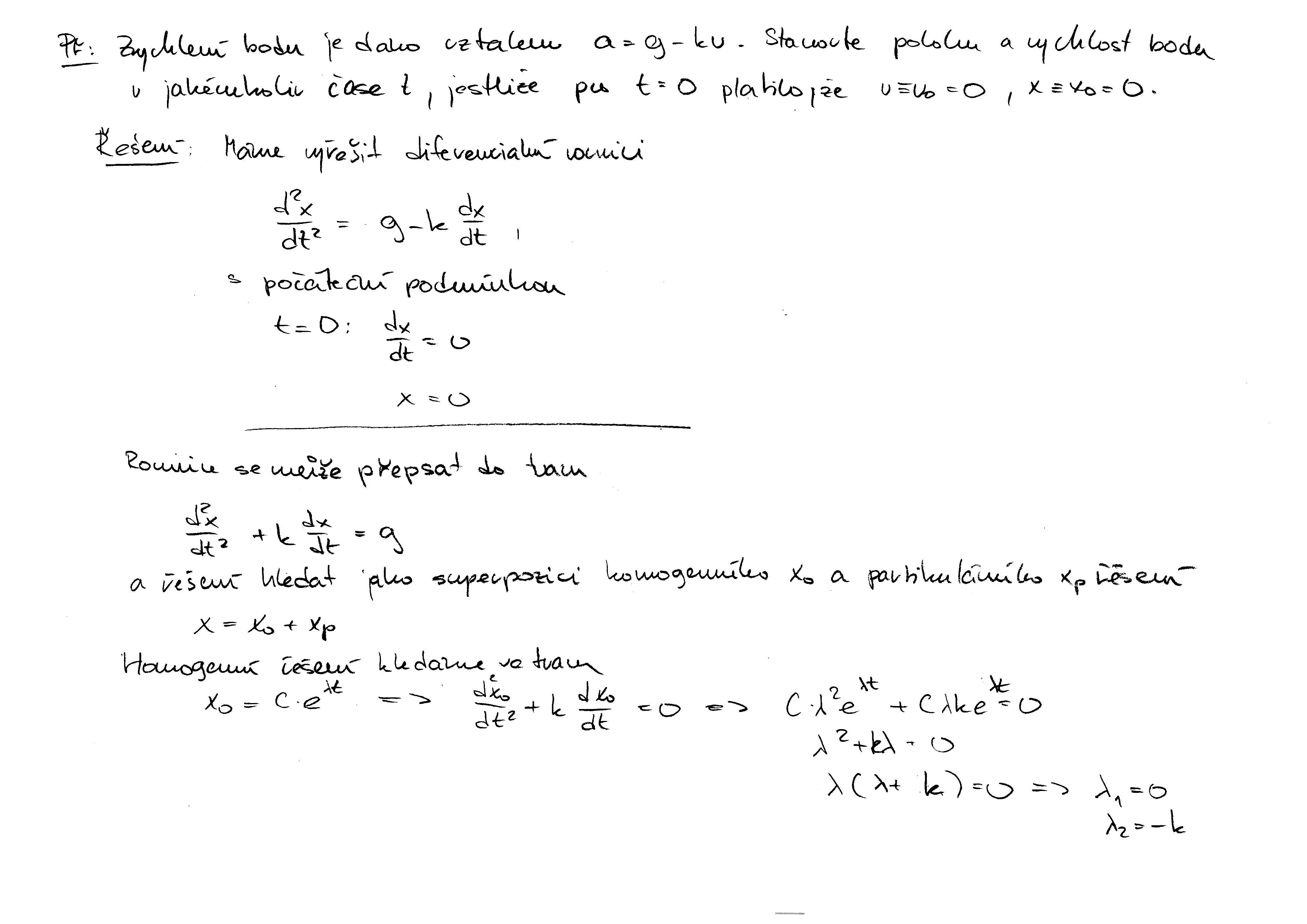
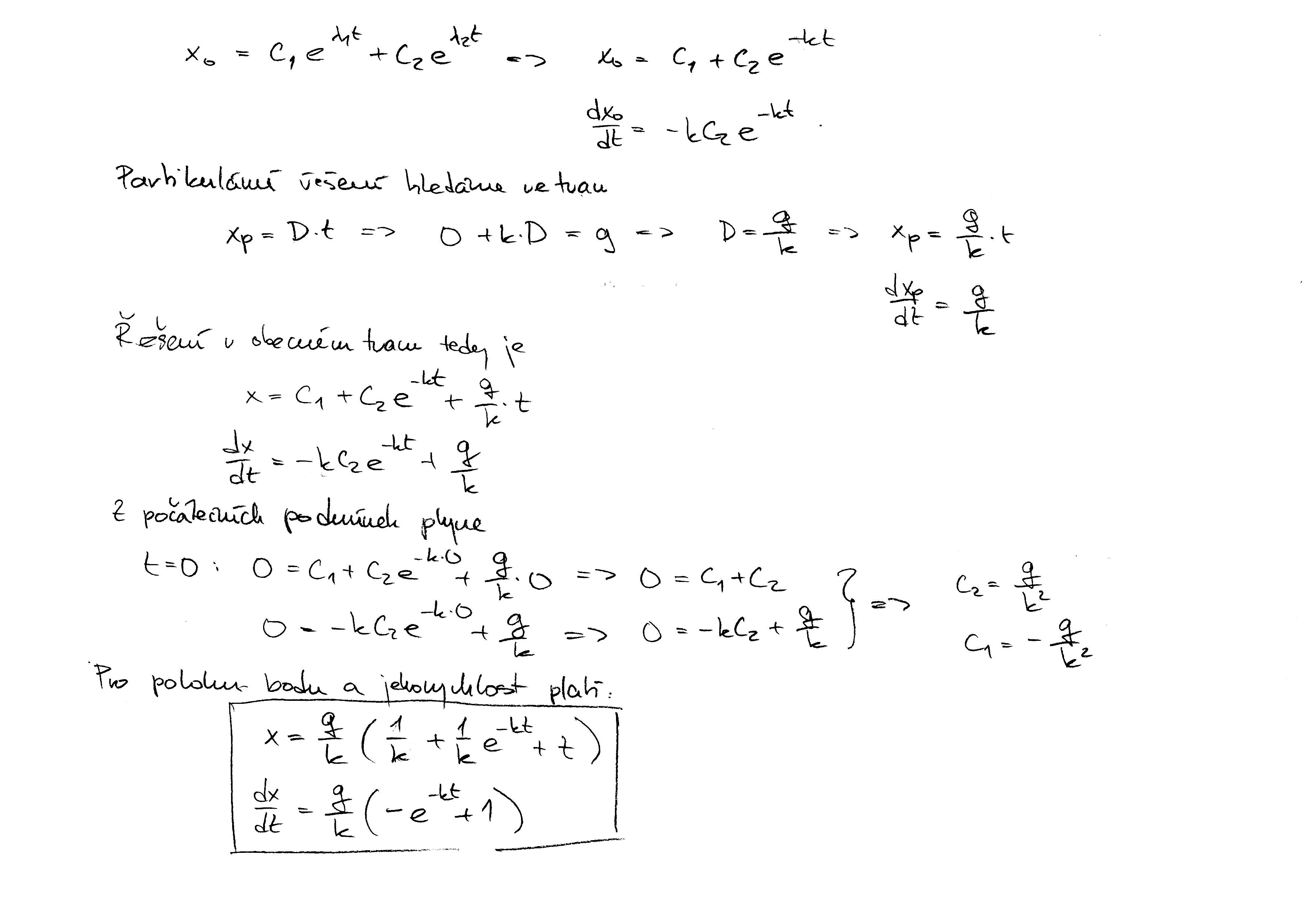
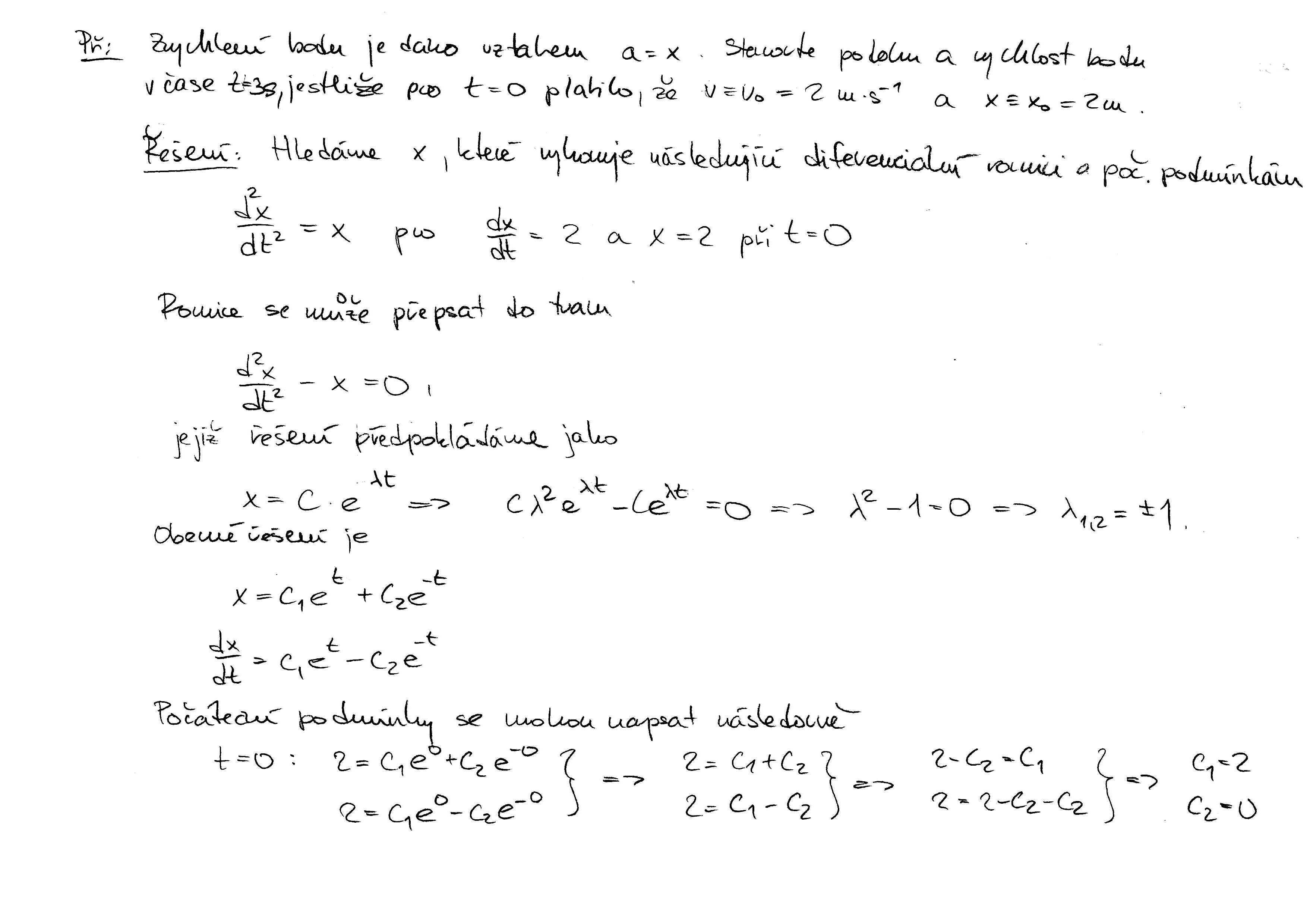
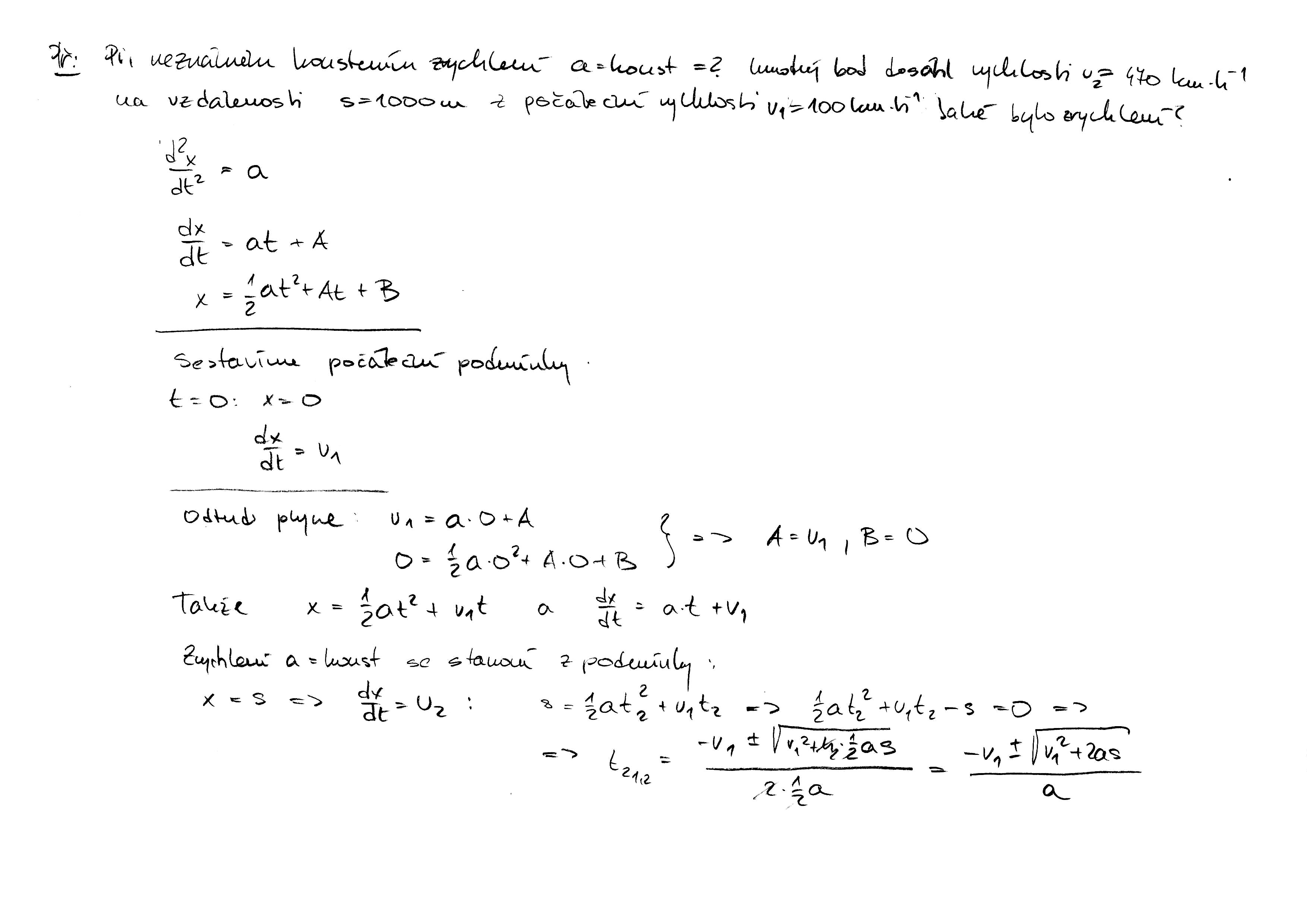
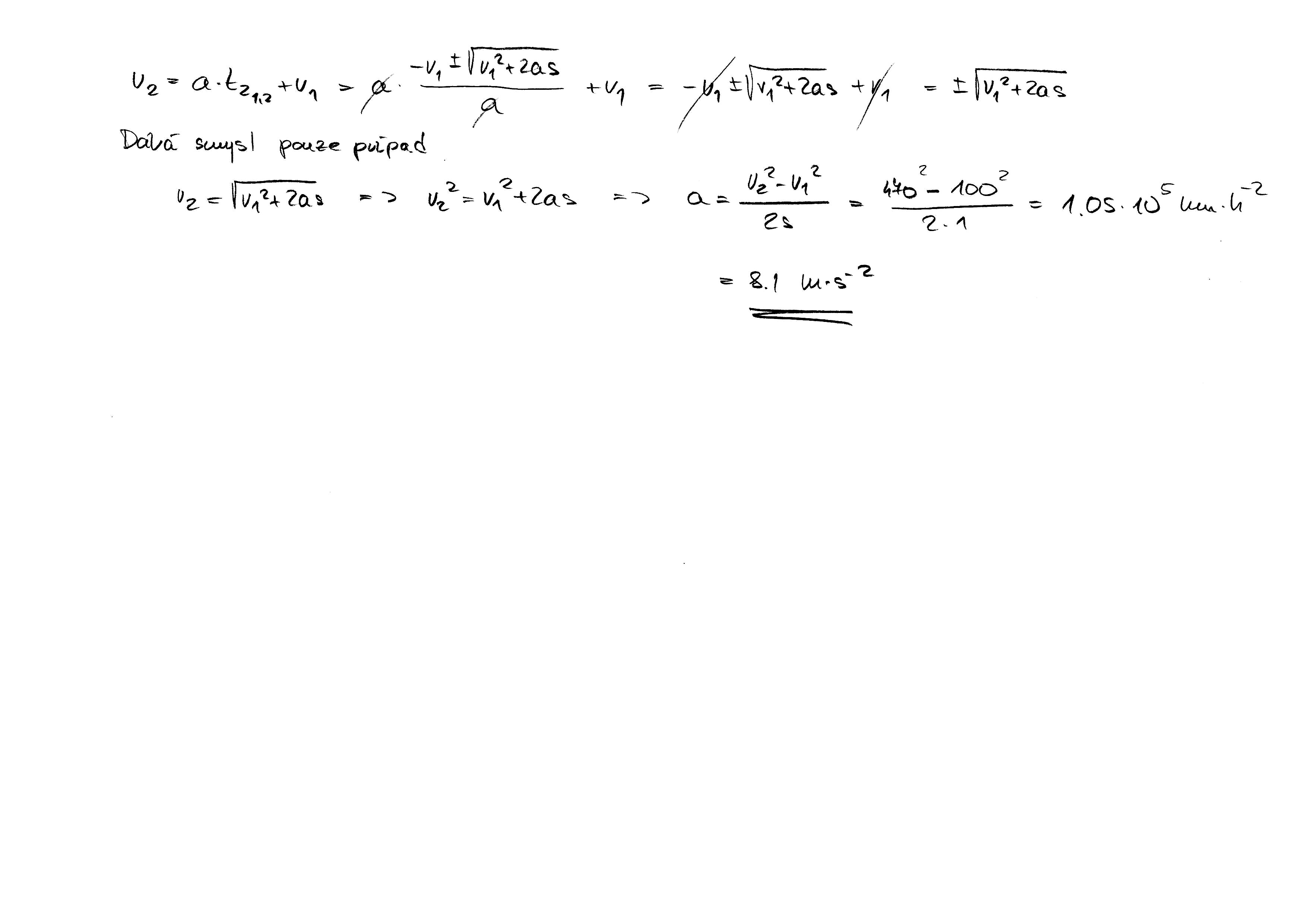
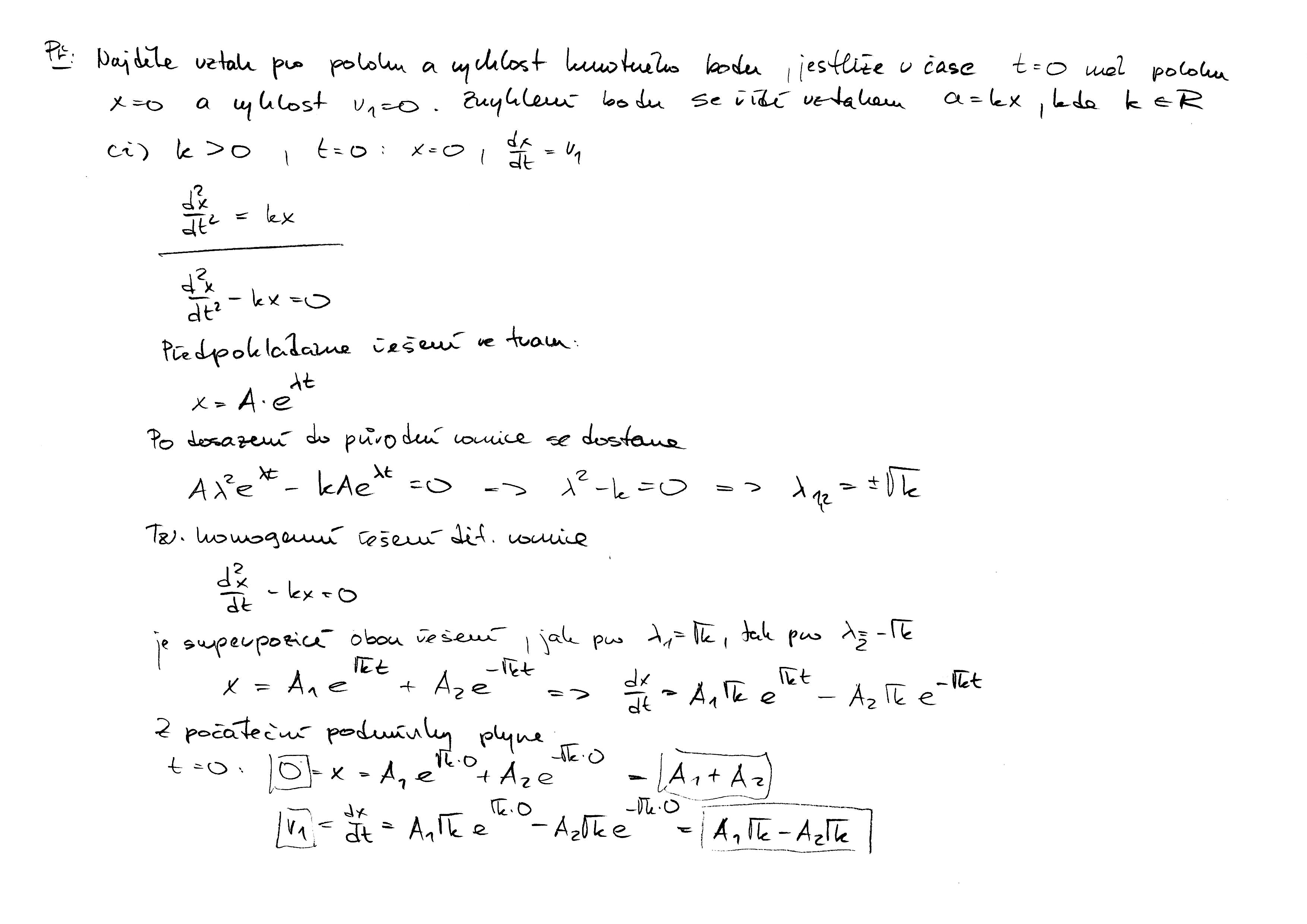
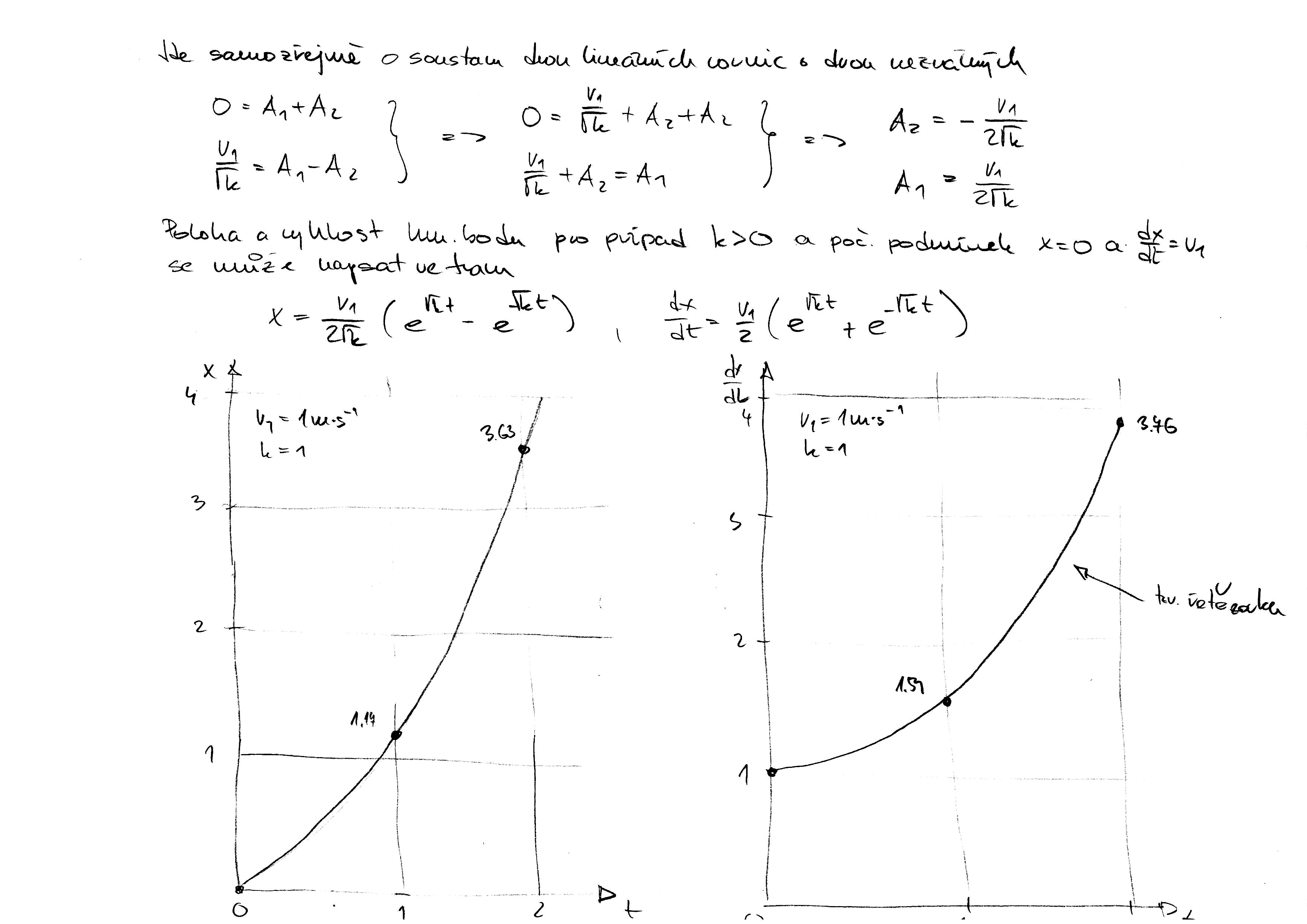
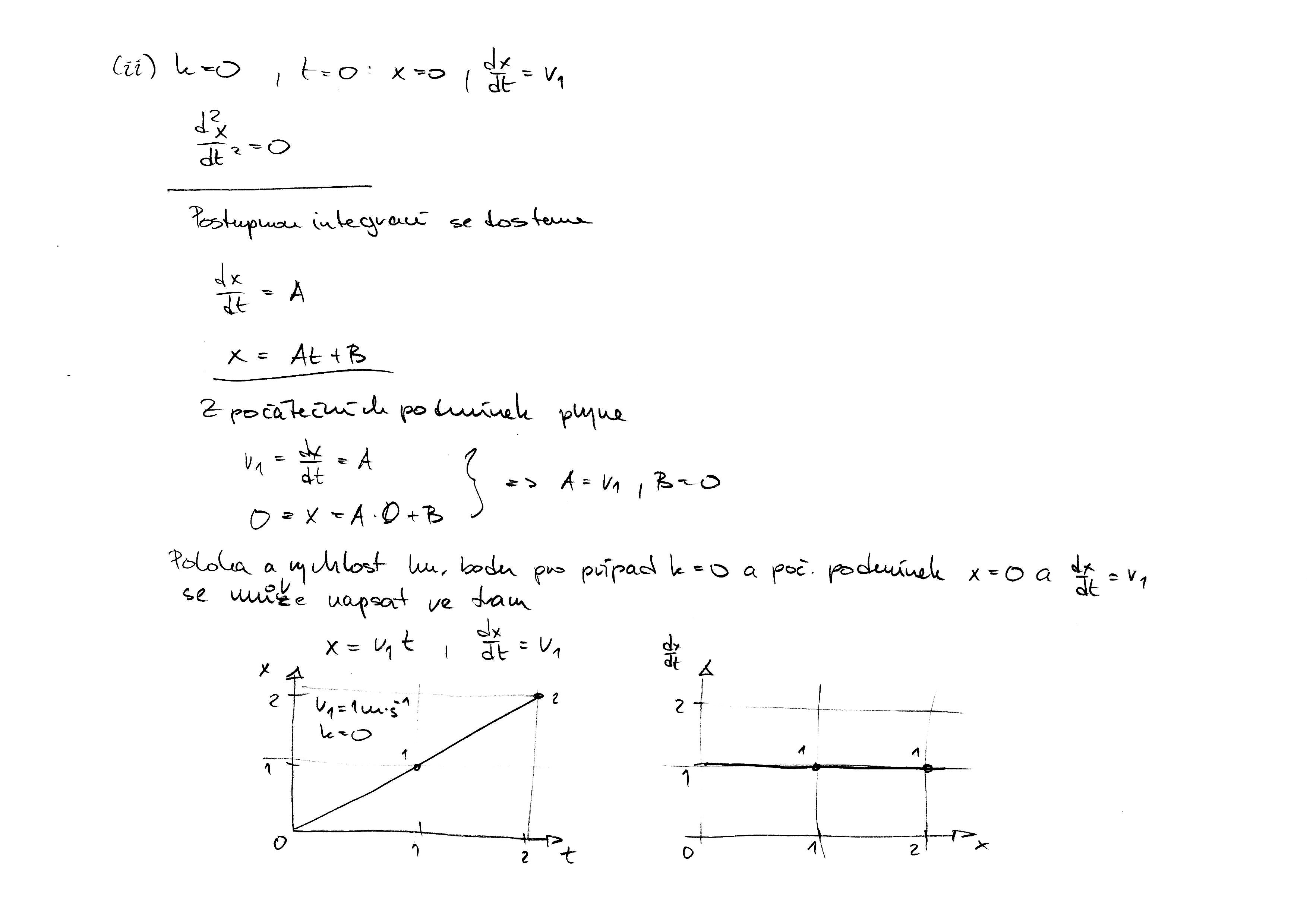
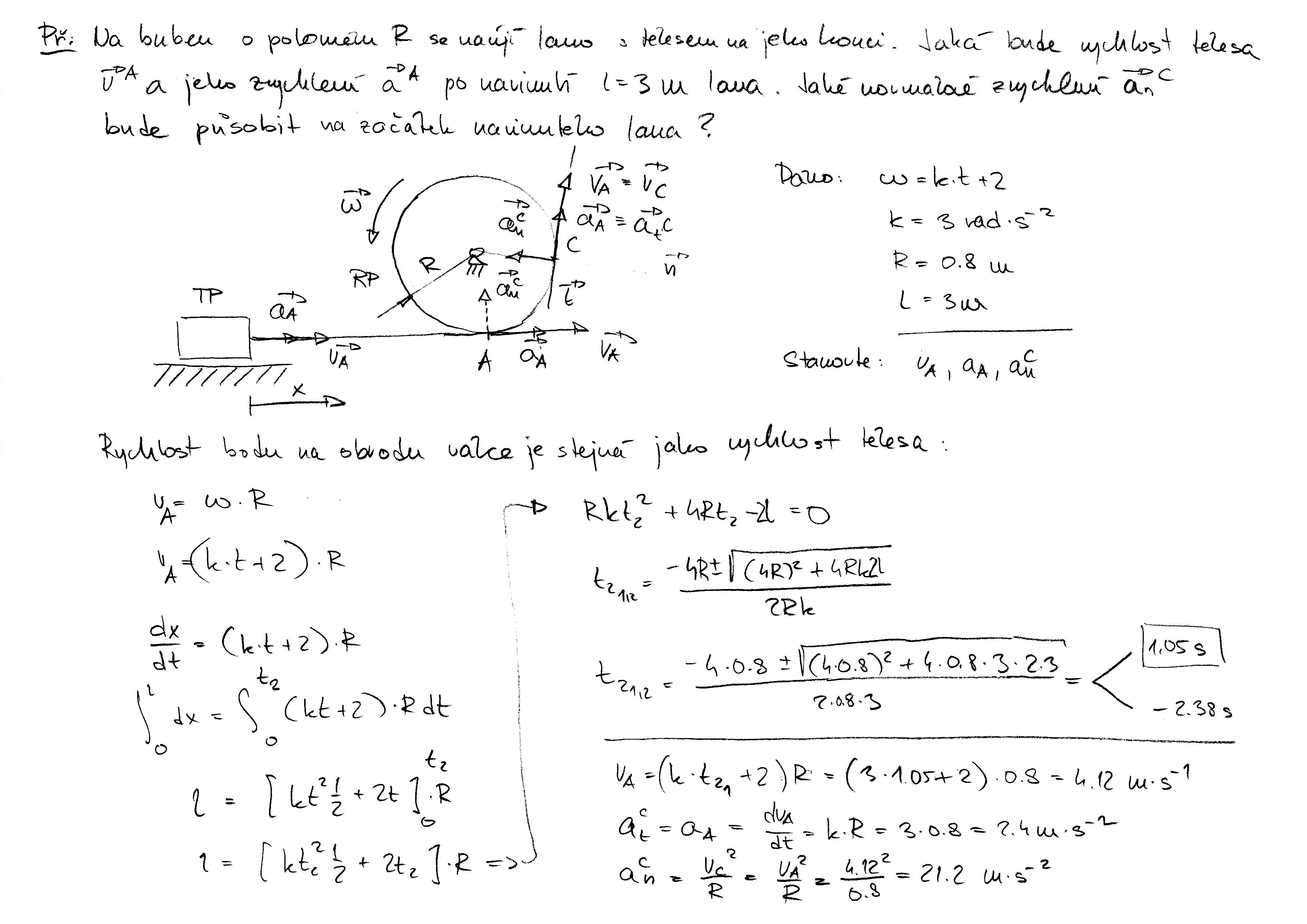
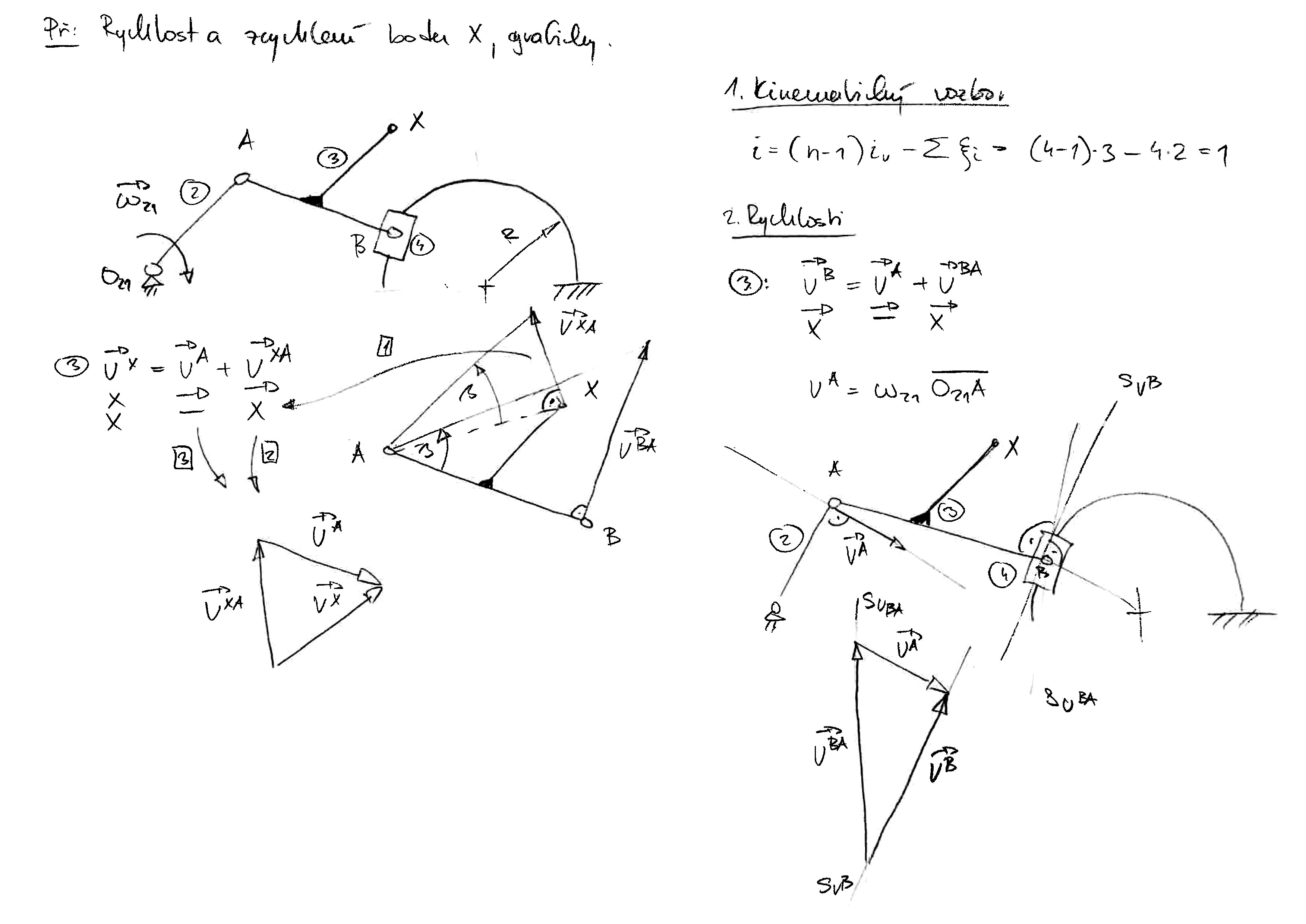
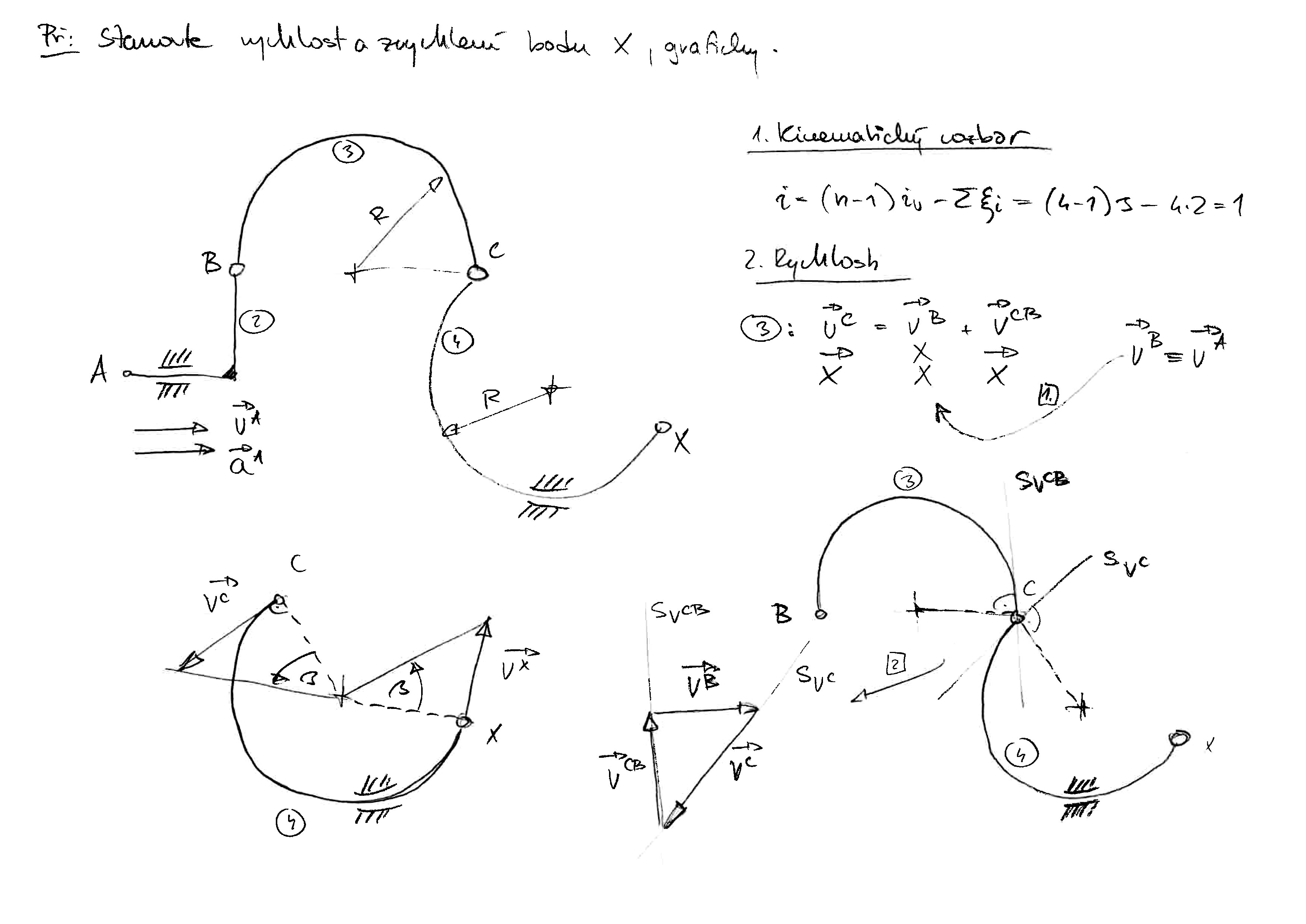
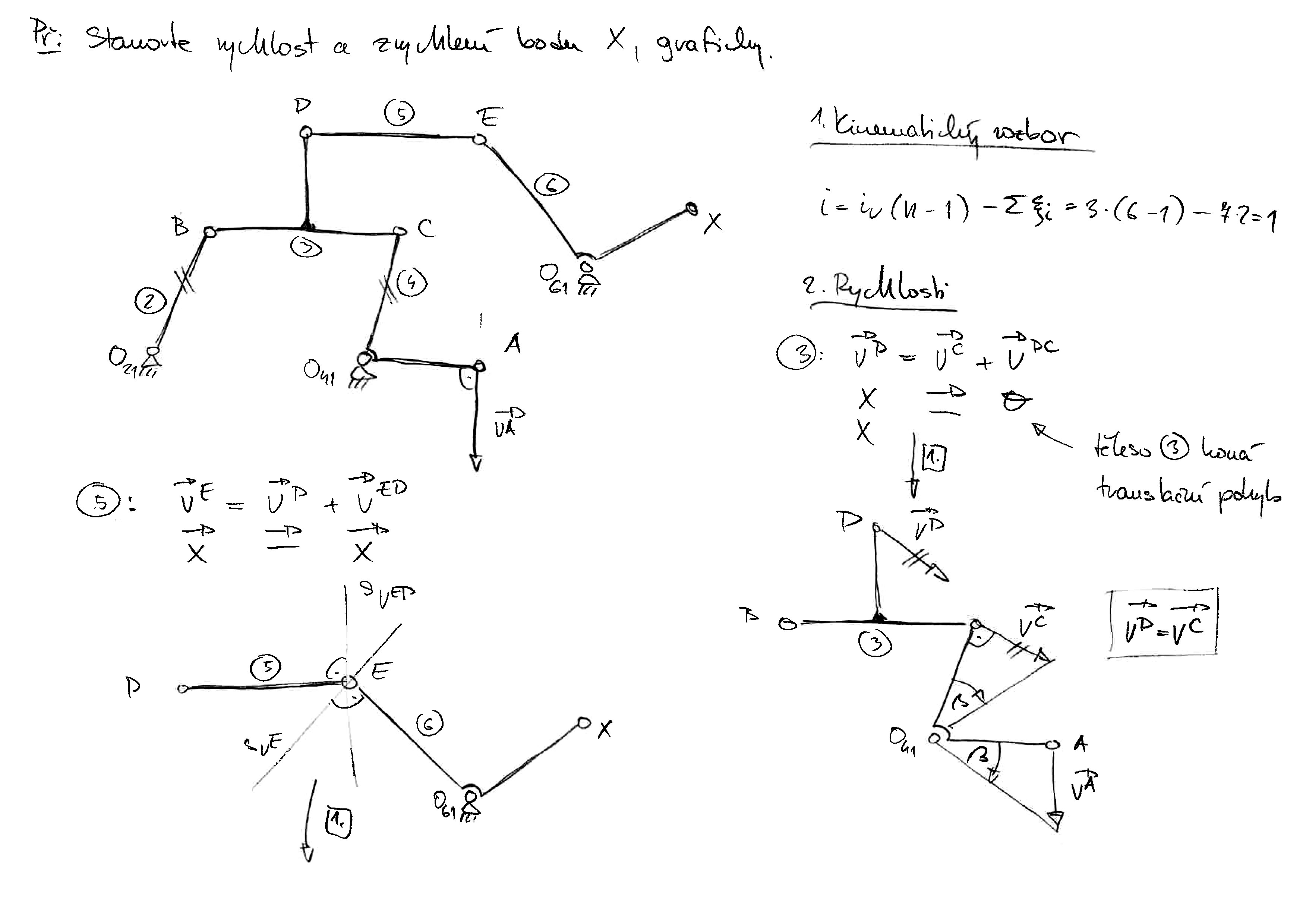
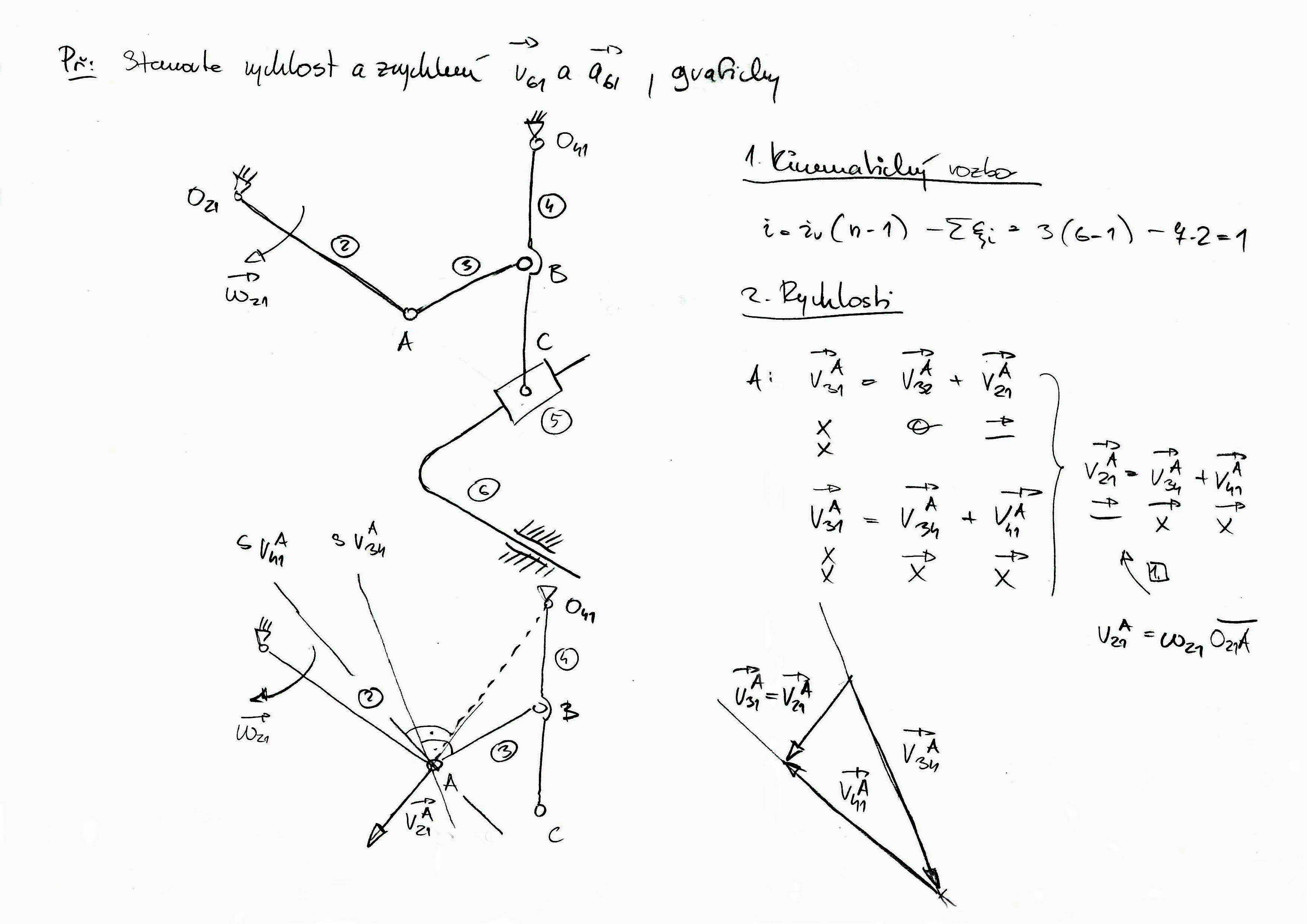
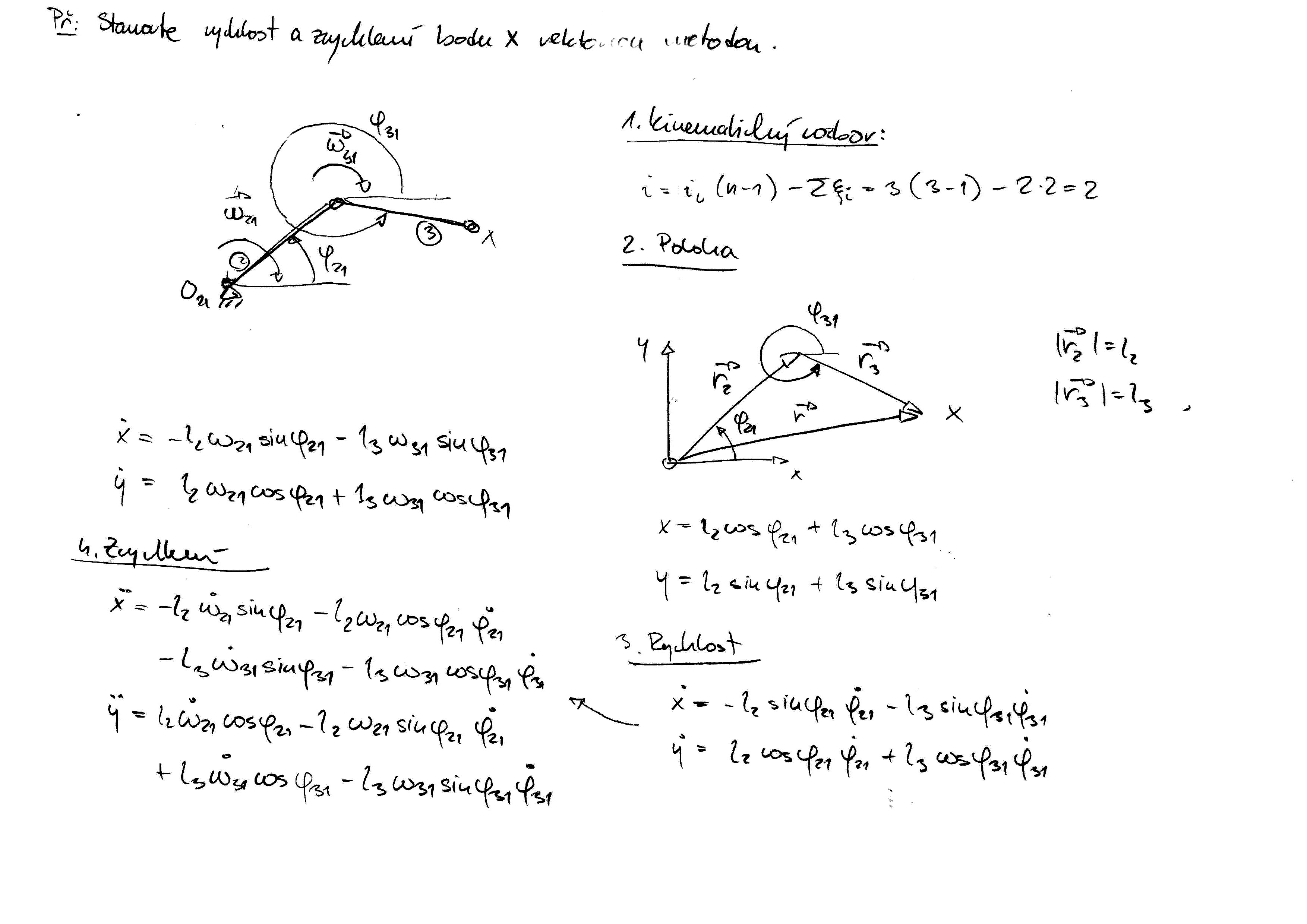
Cvičení 1: Kinematika bodu, vztahy mezi kinematickými veličinami.
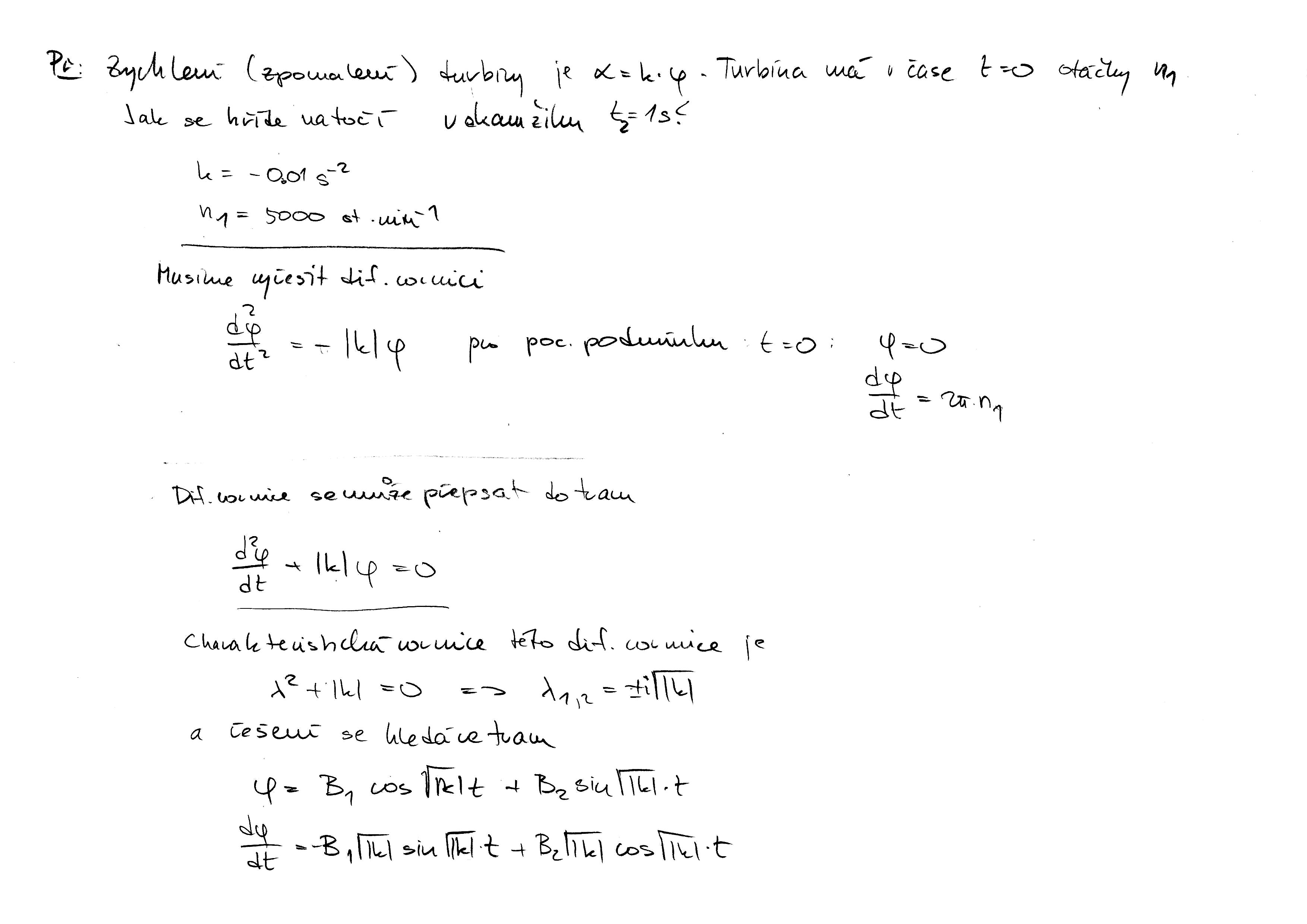
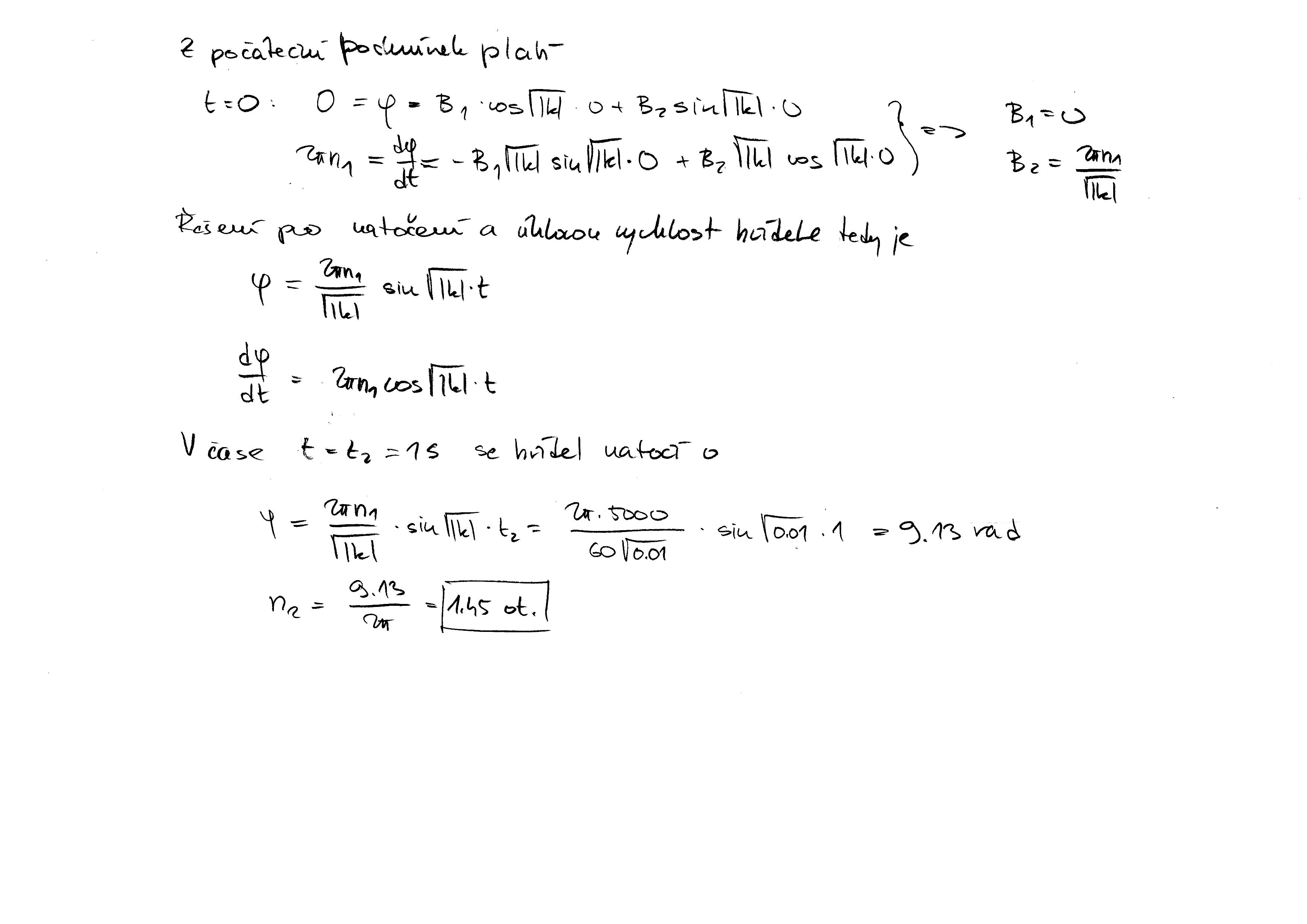
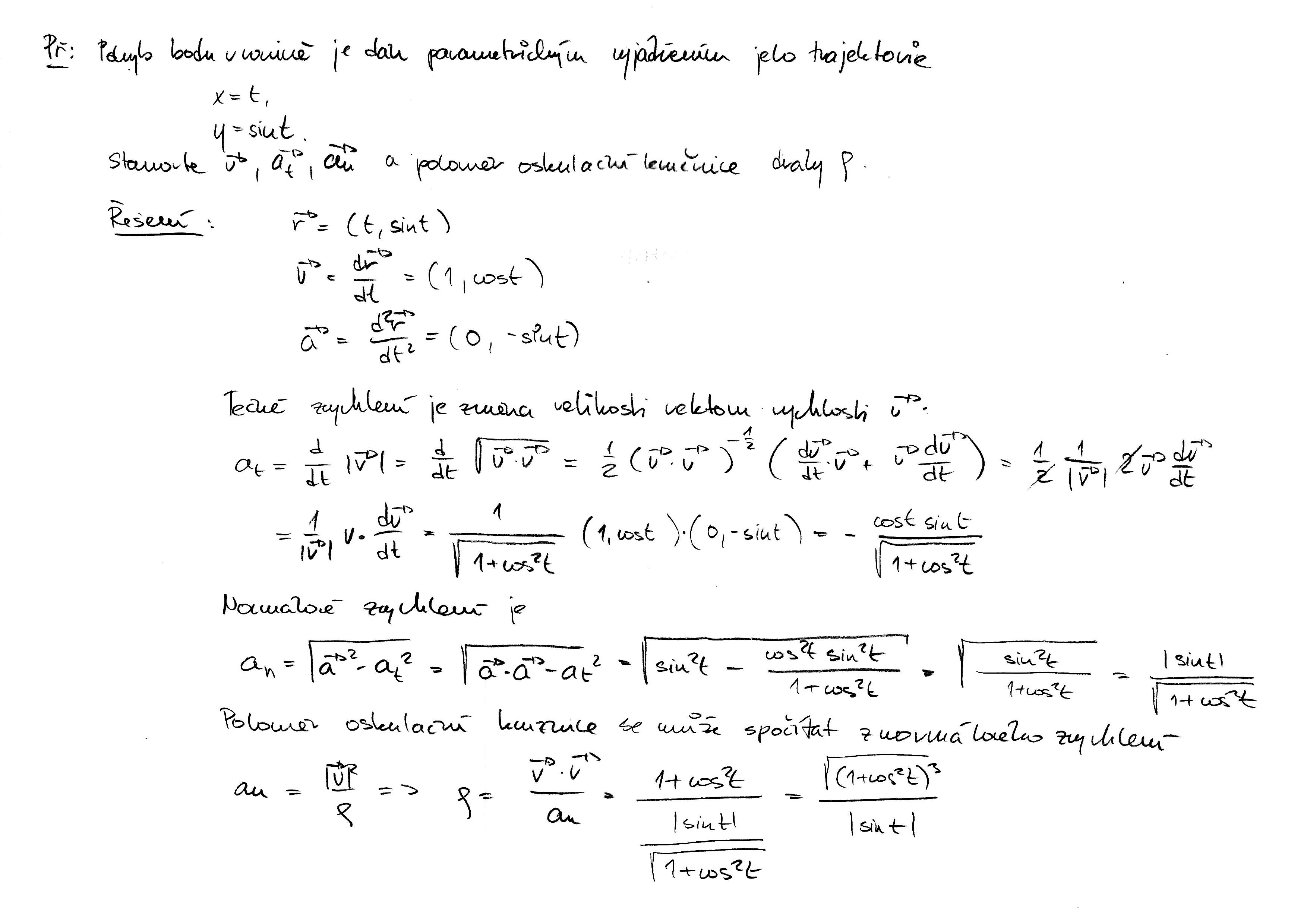
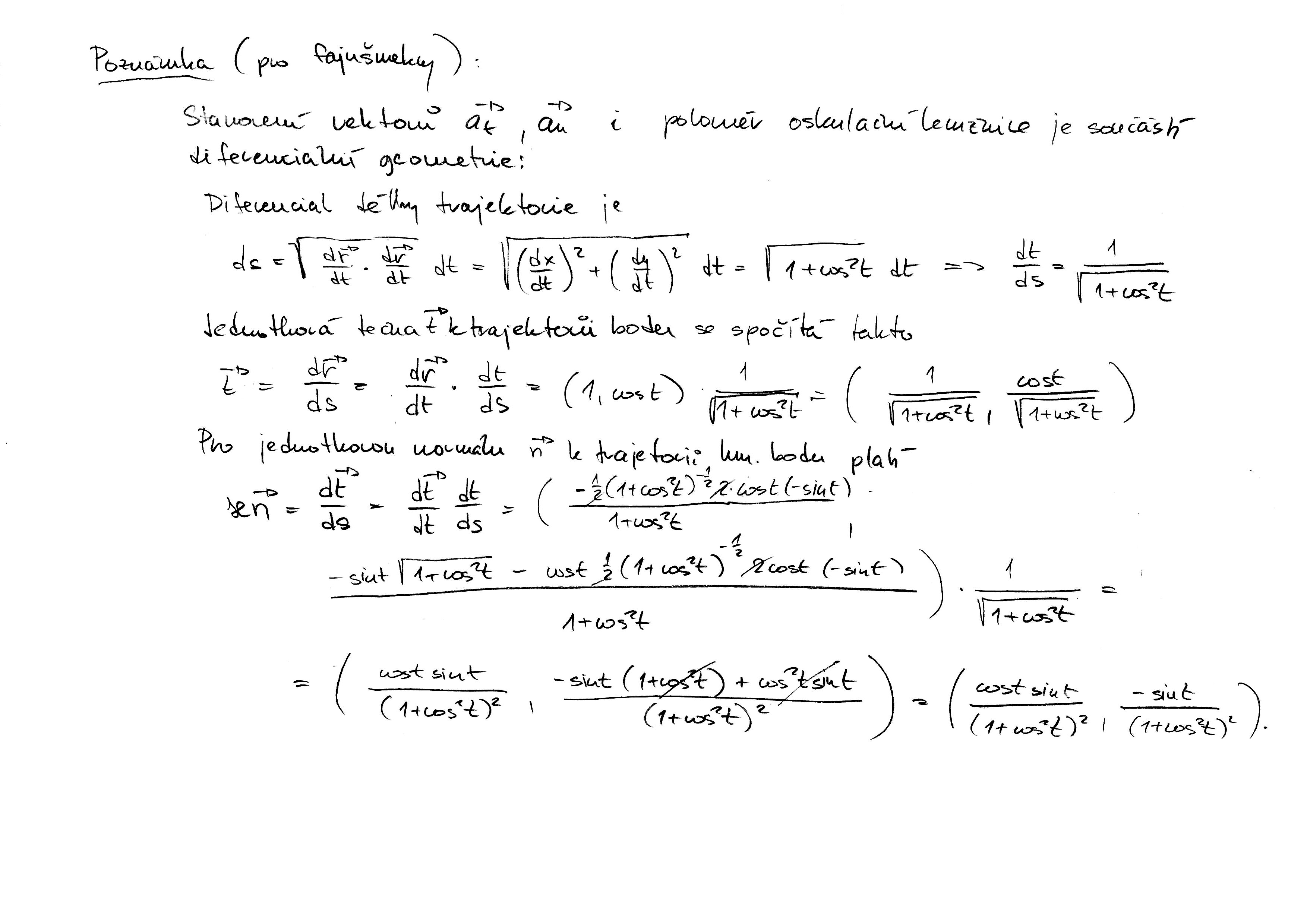
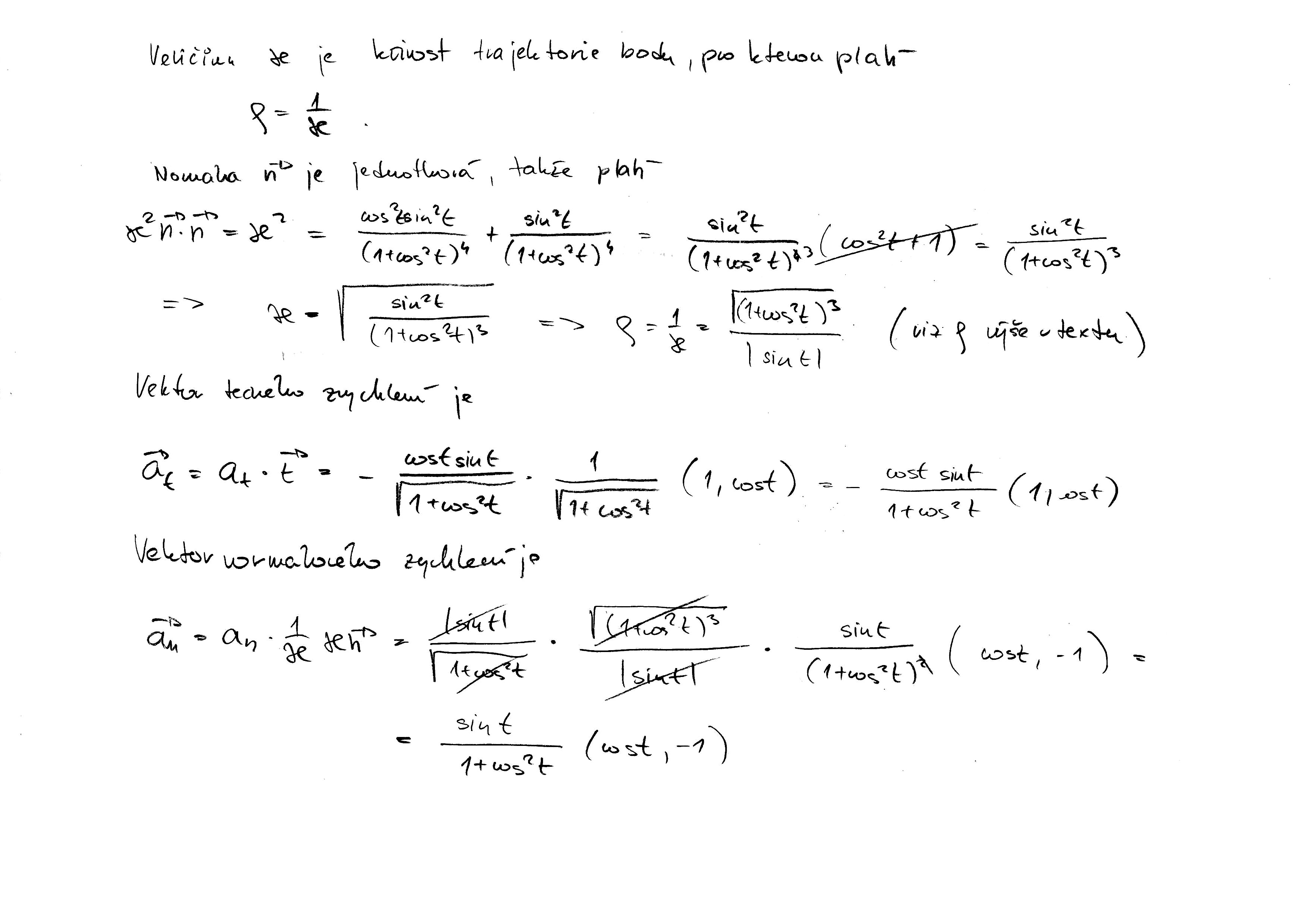
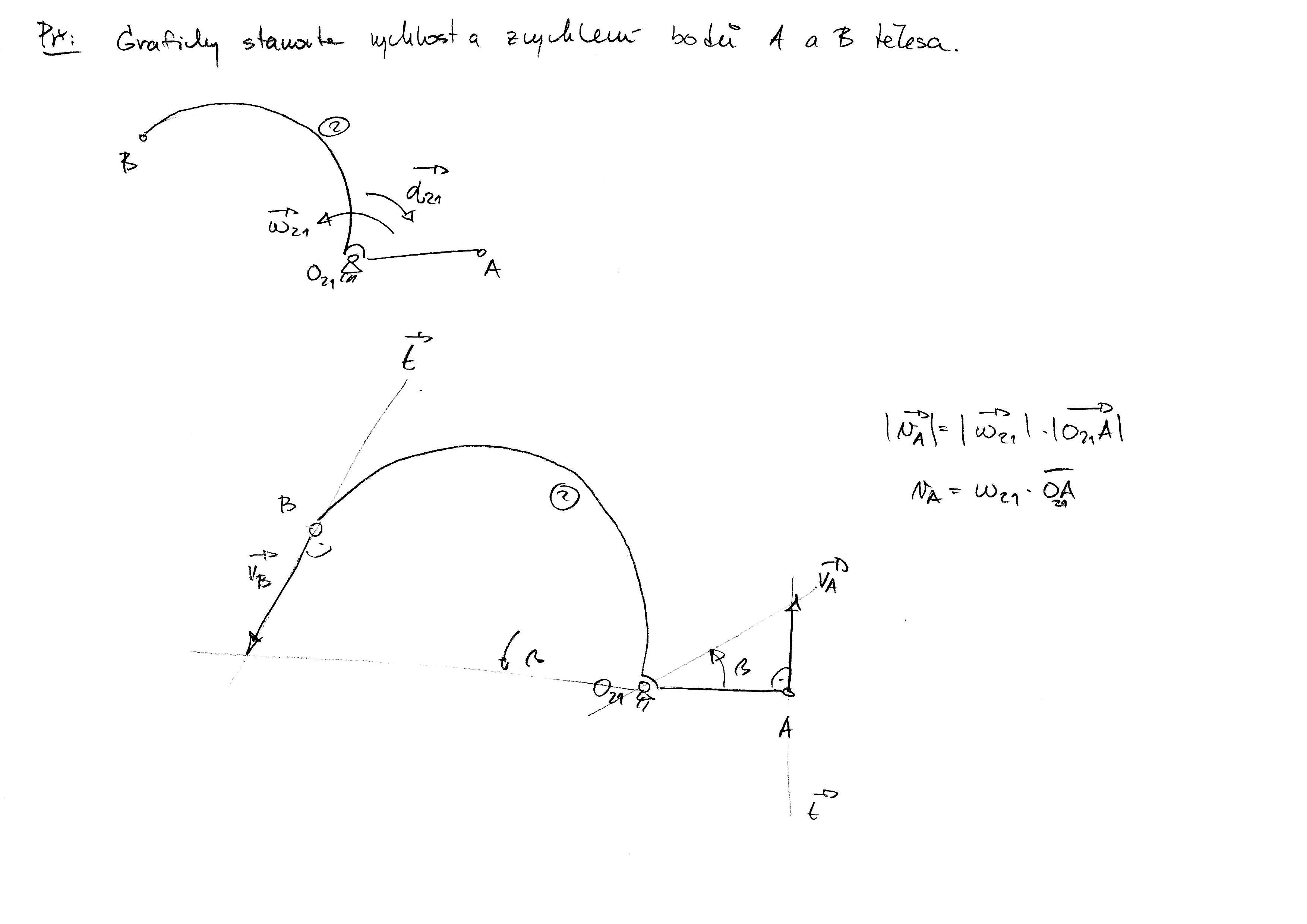
Cvičení 2: Kinematika bodu, střed křivost trajektorie.
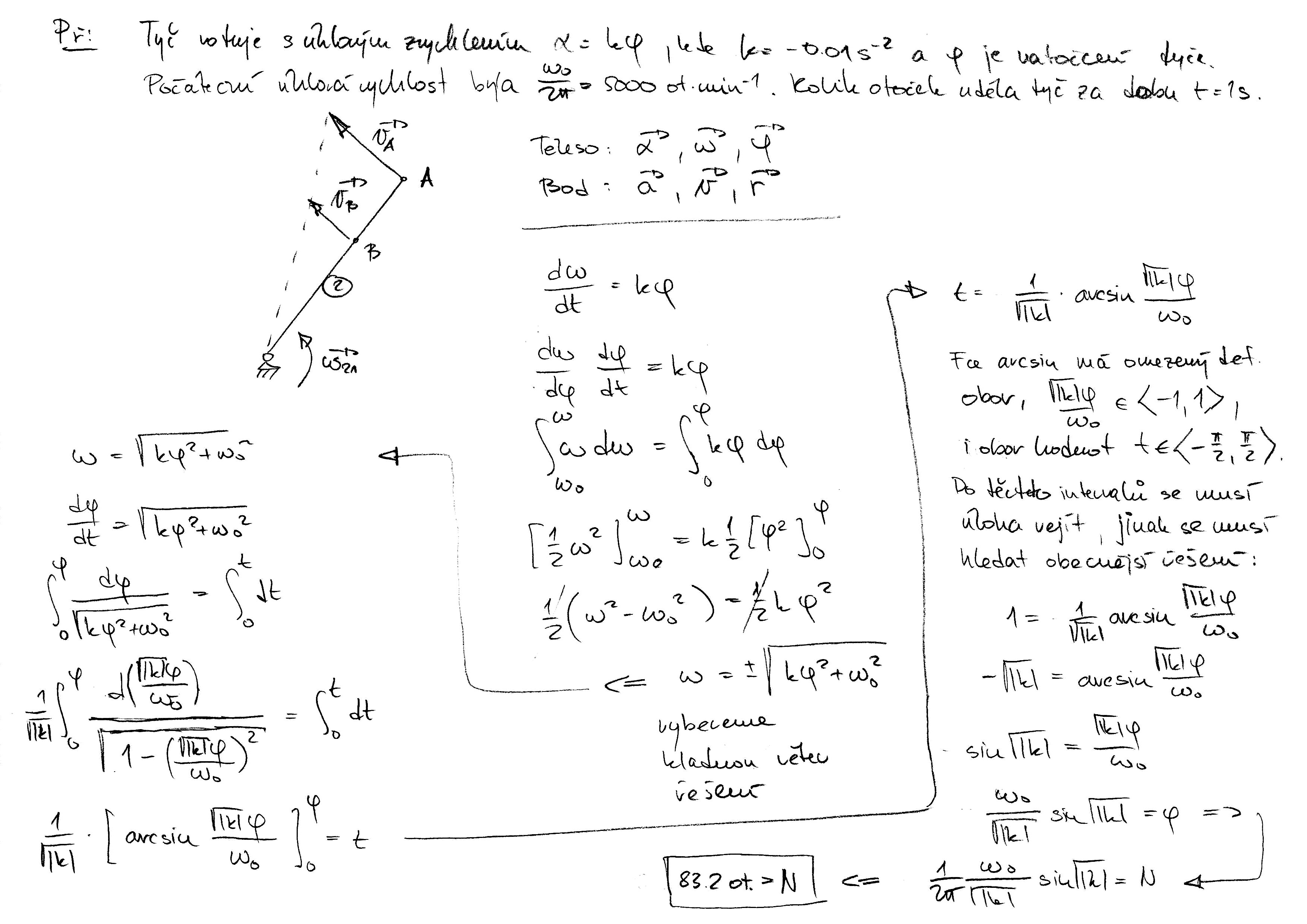
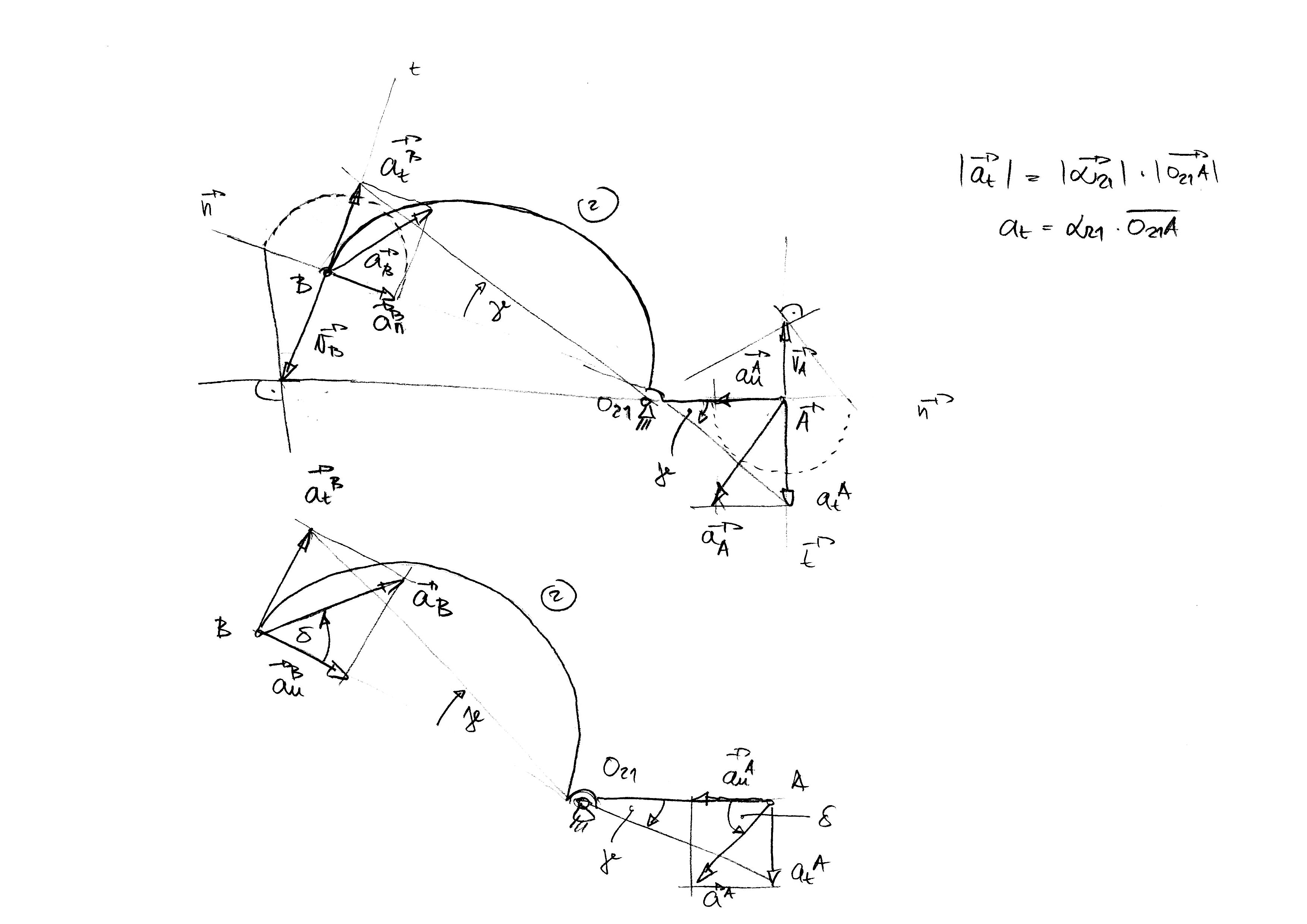
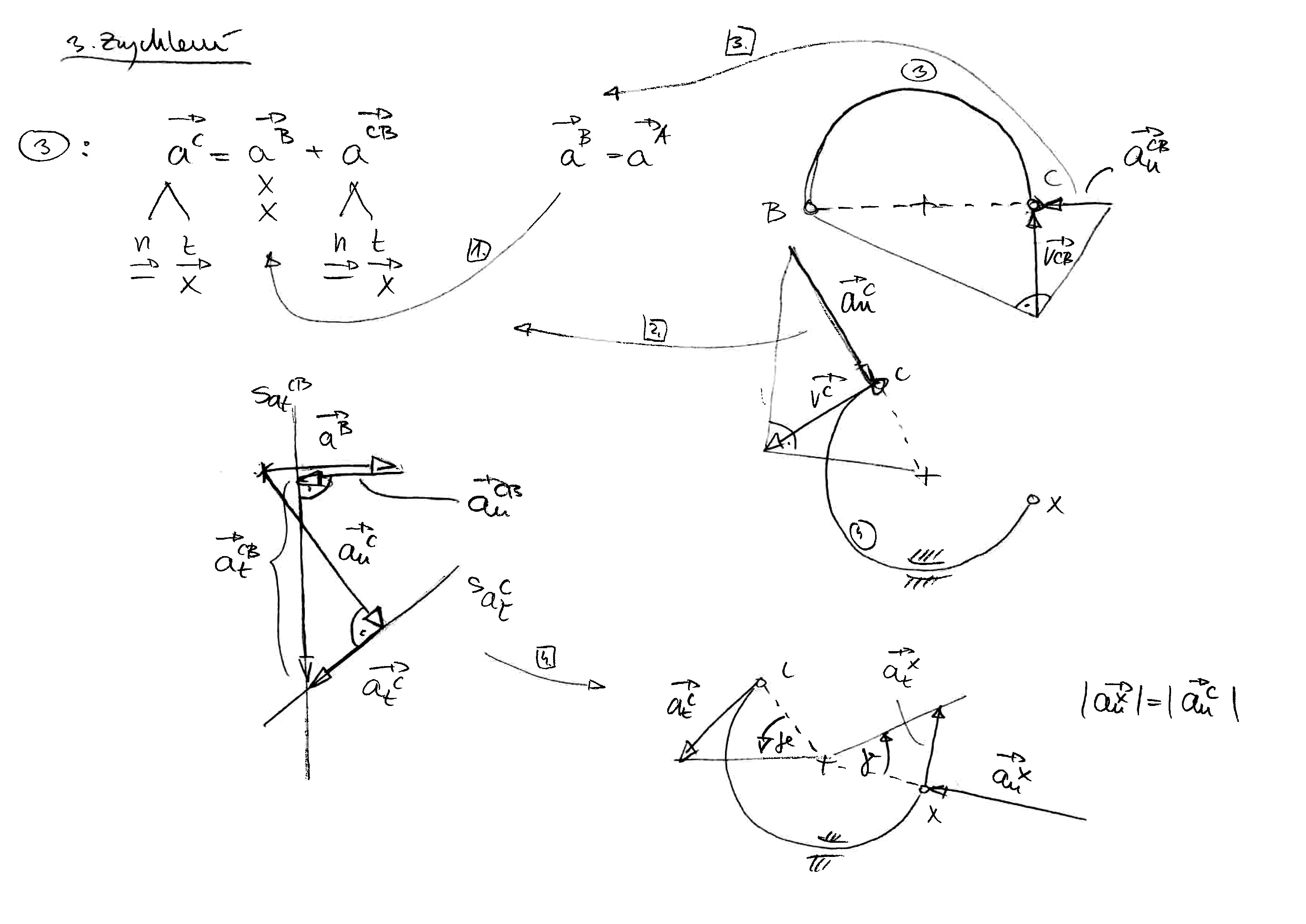
Cvičení 3: Rotační pohyb tělesa.
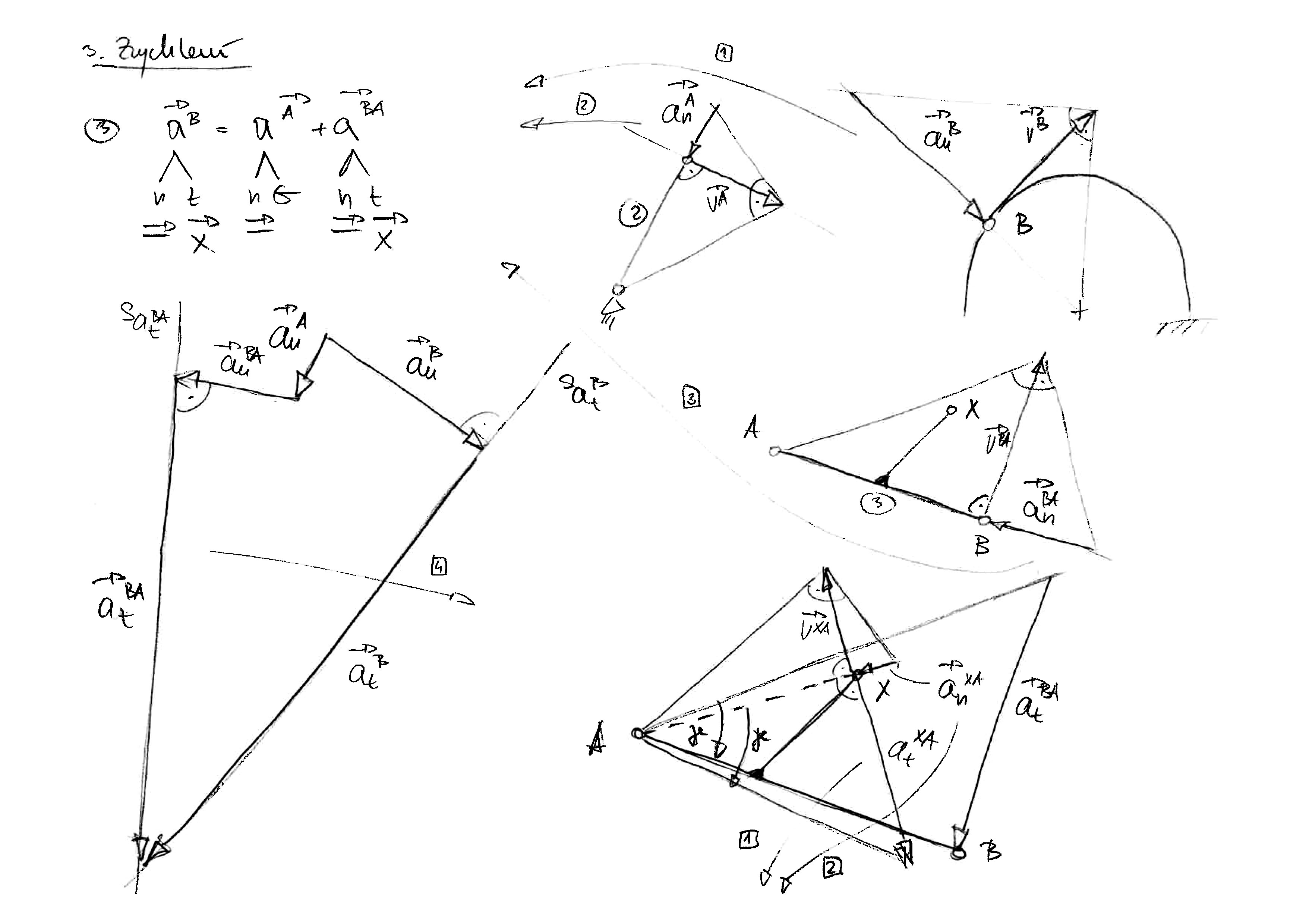
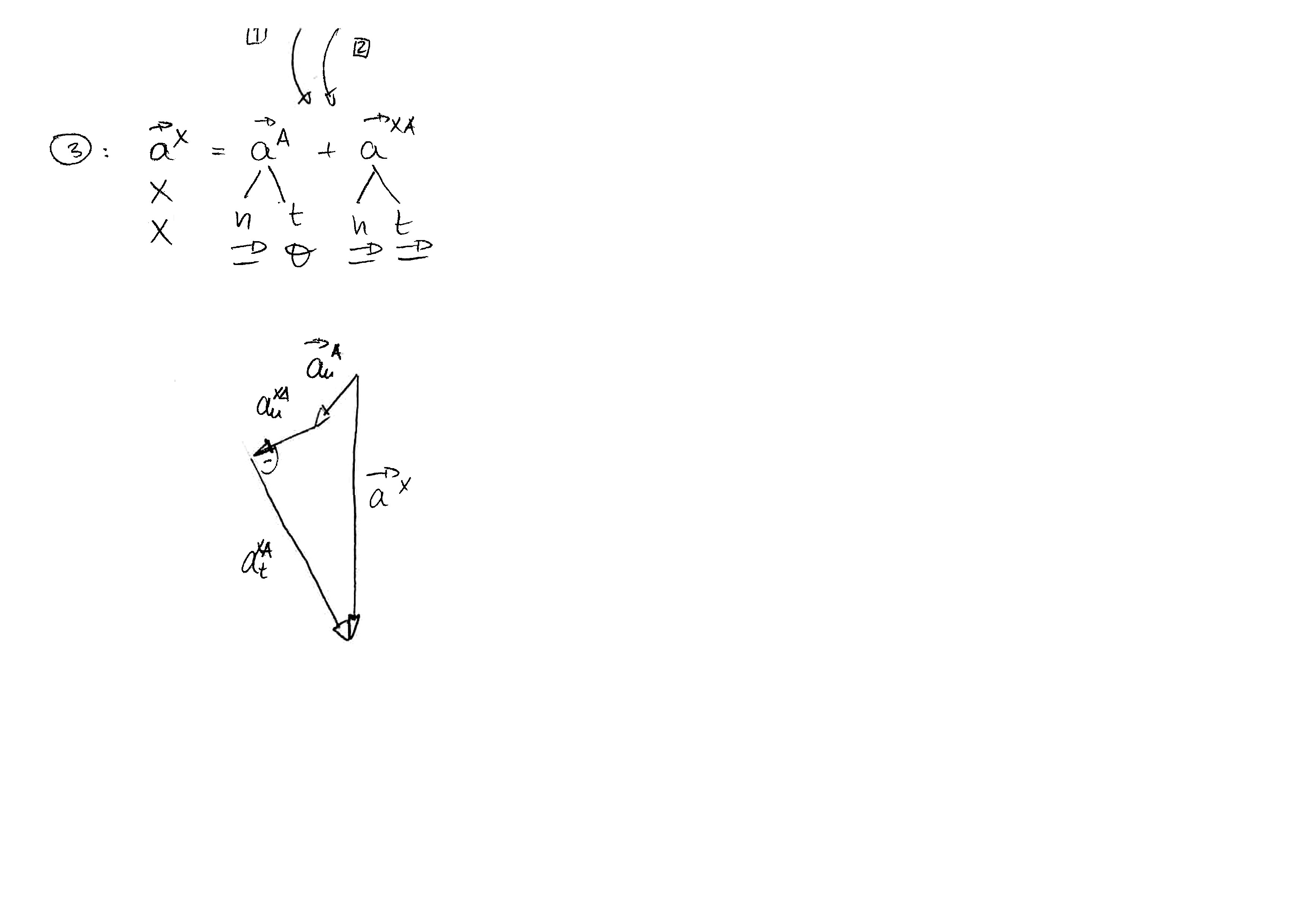
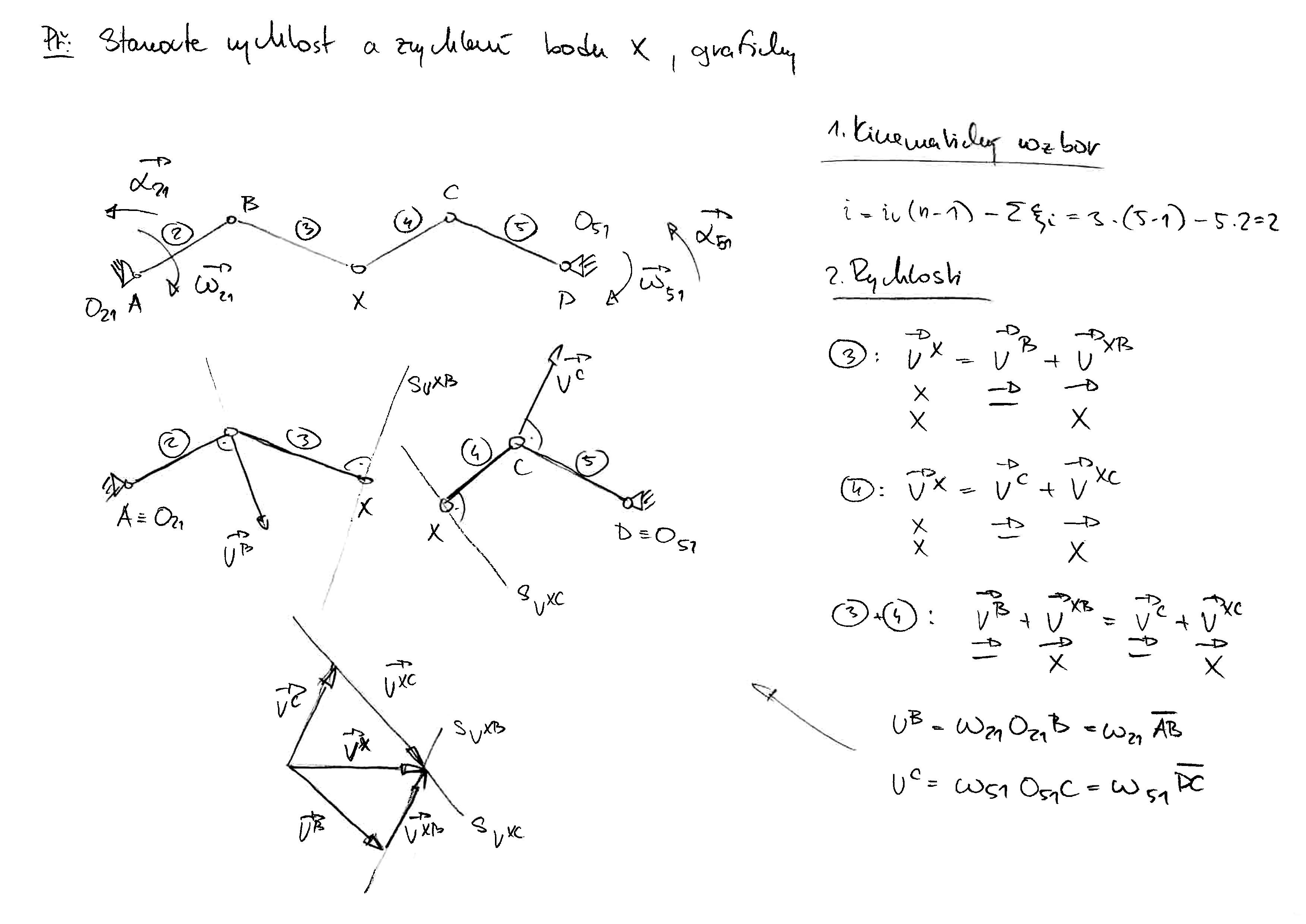
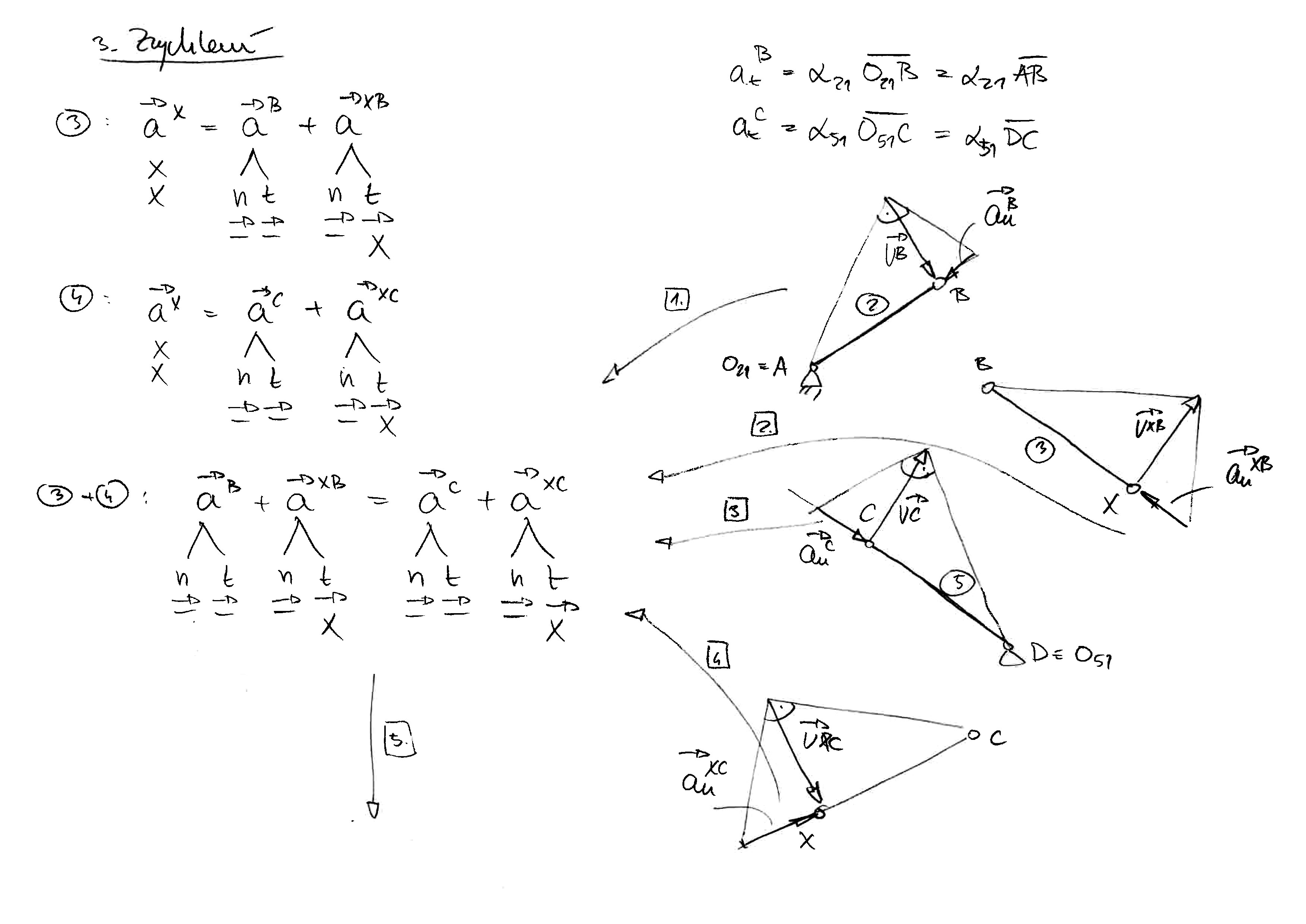
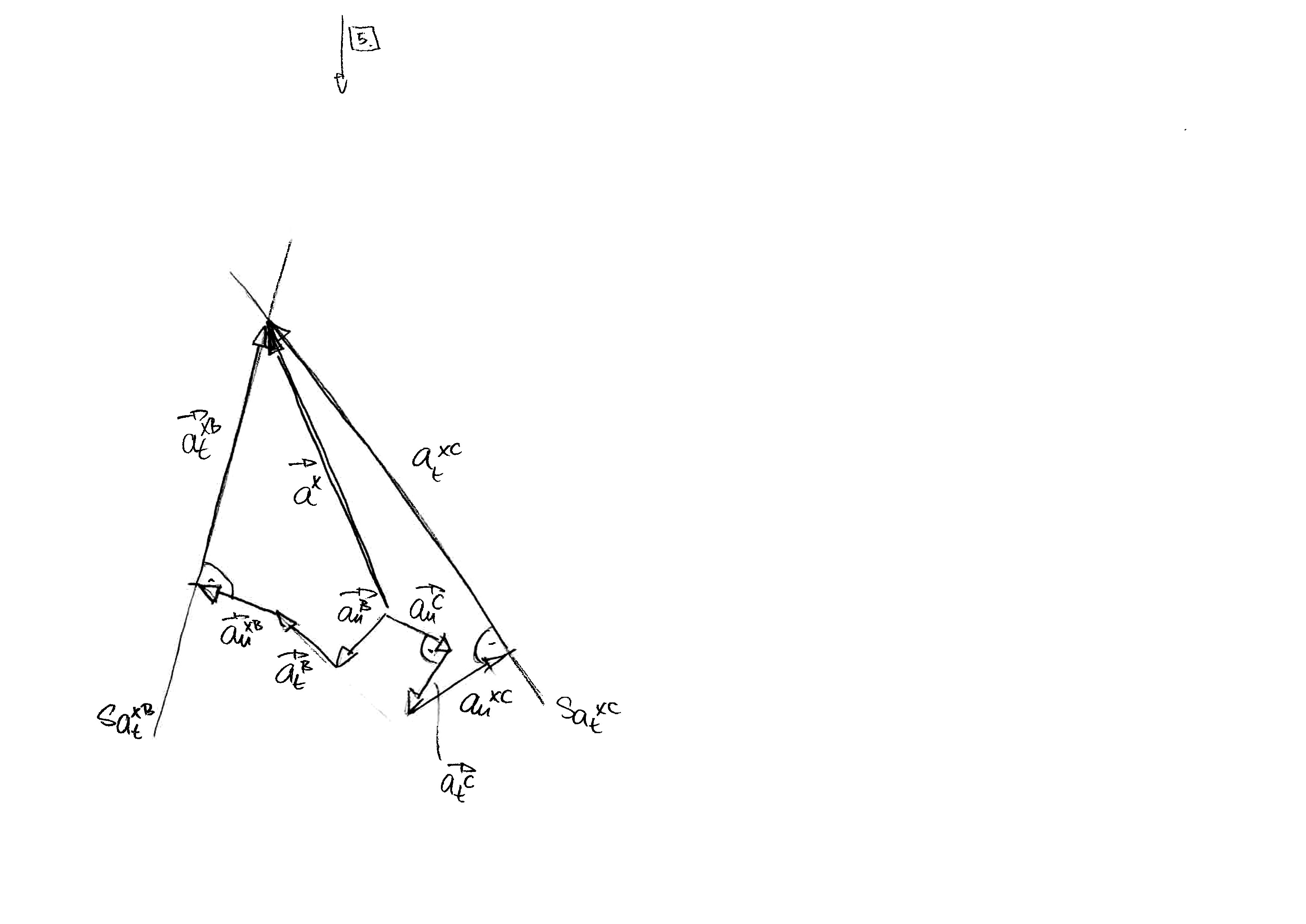
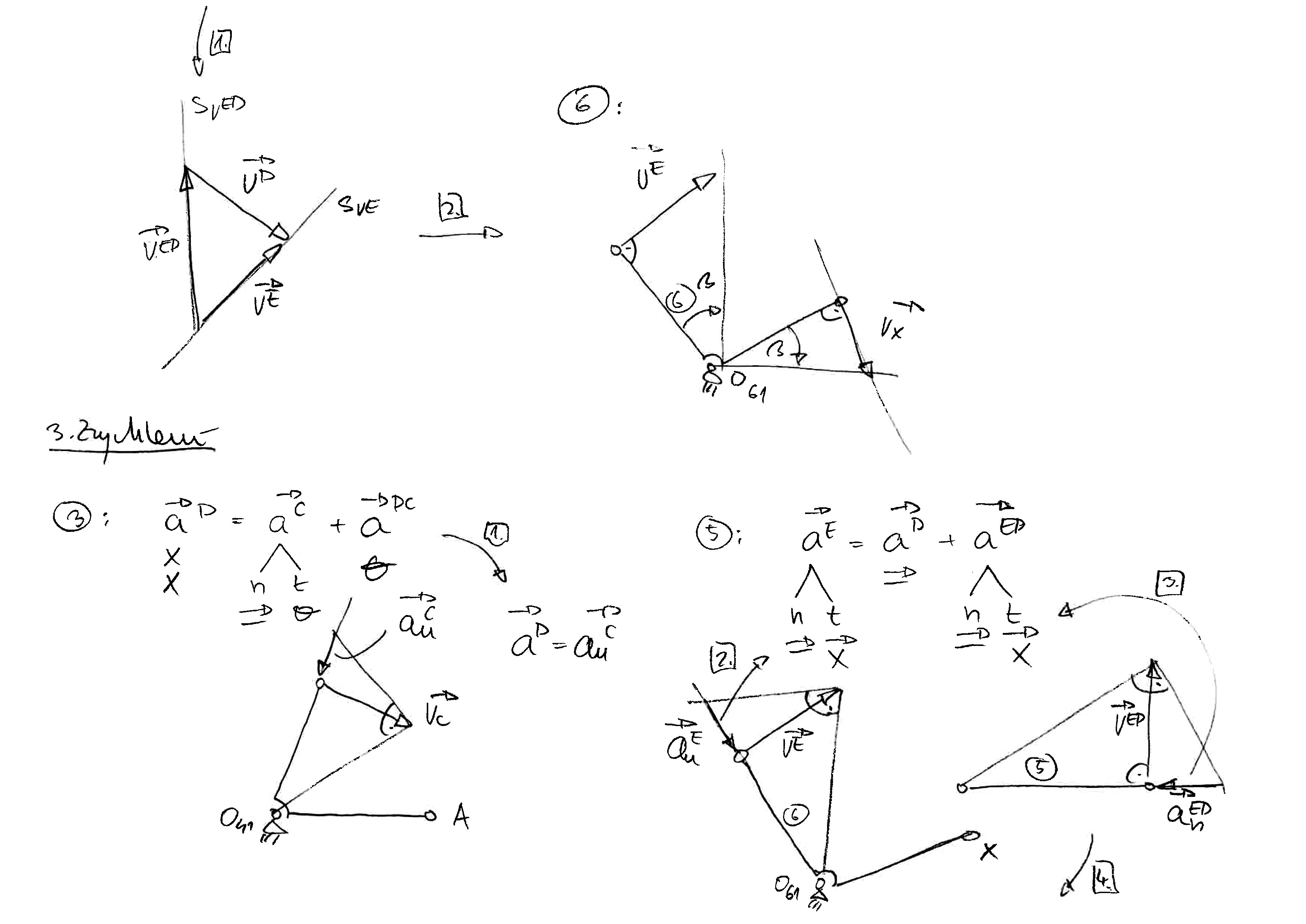
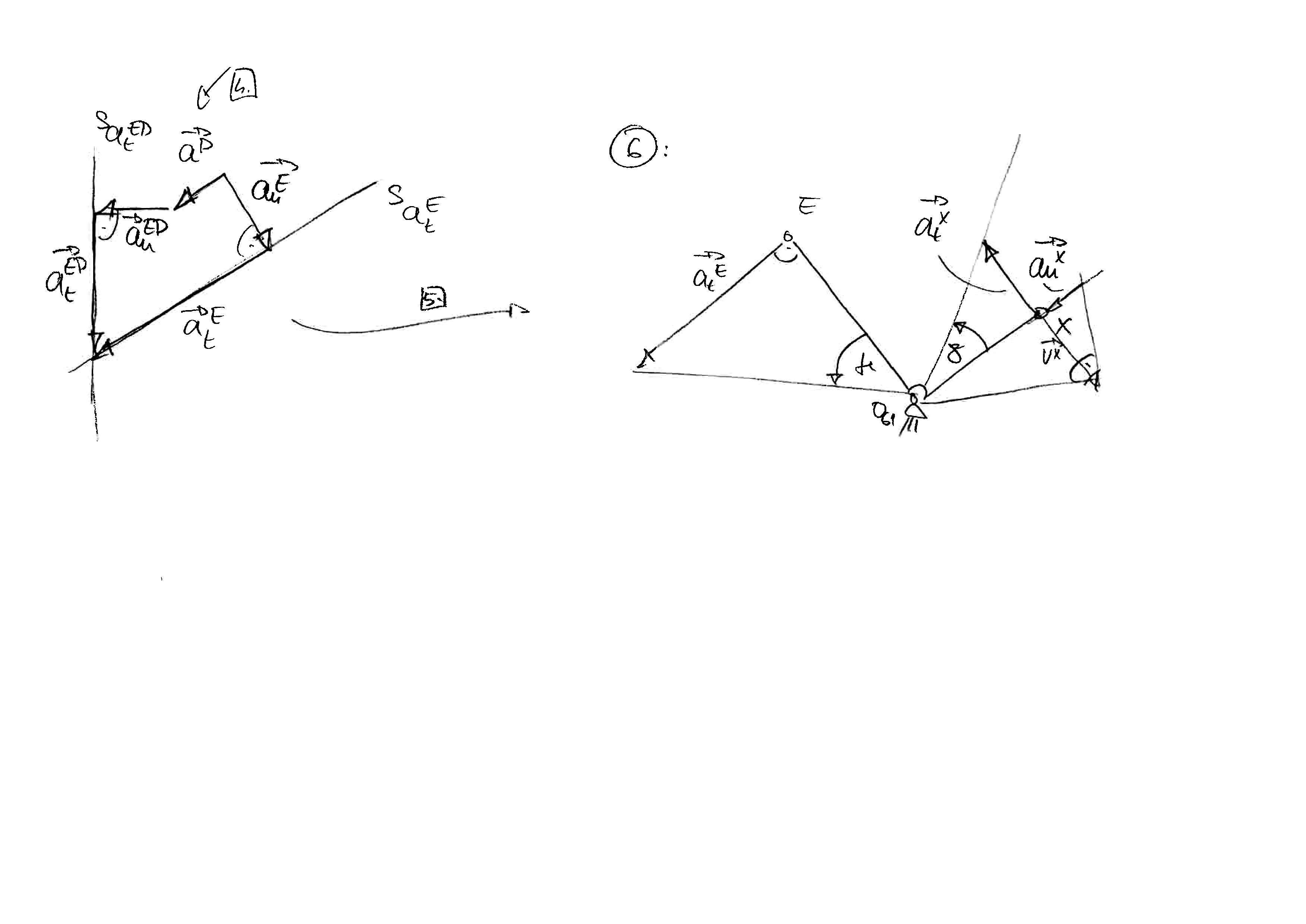
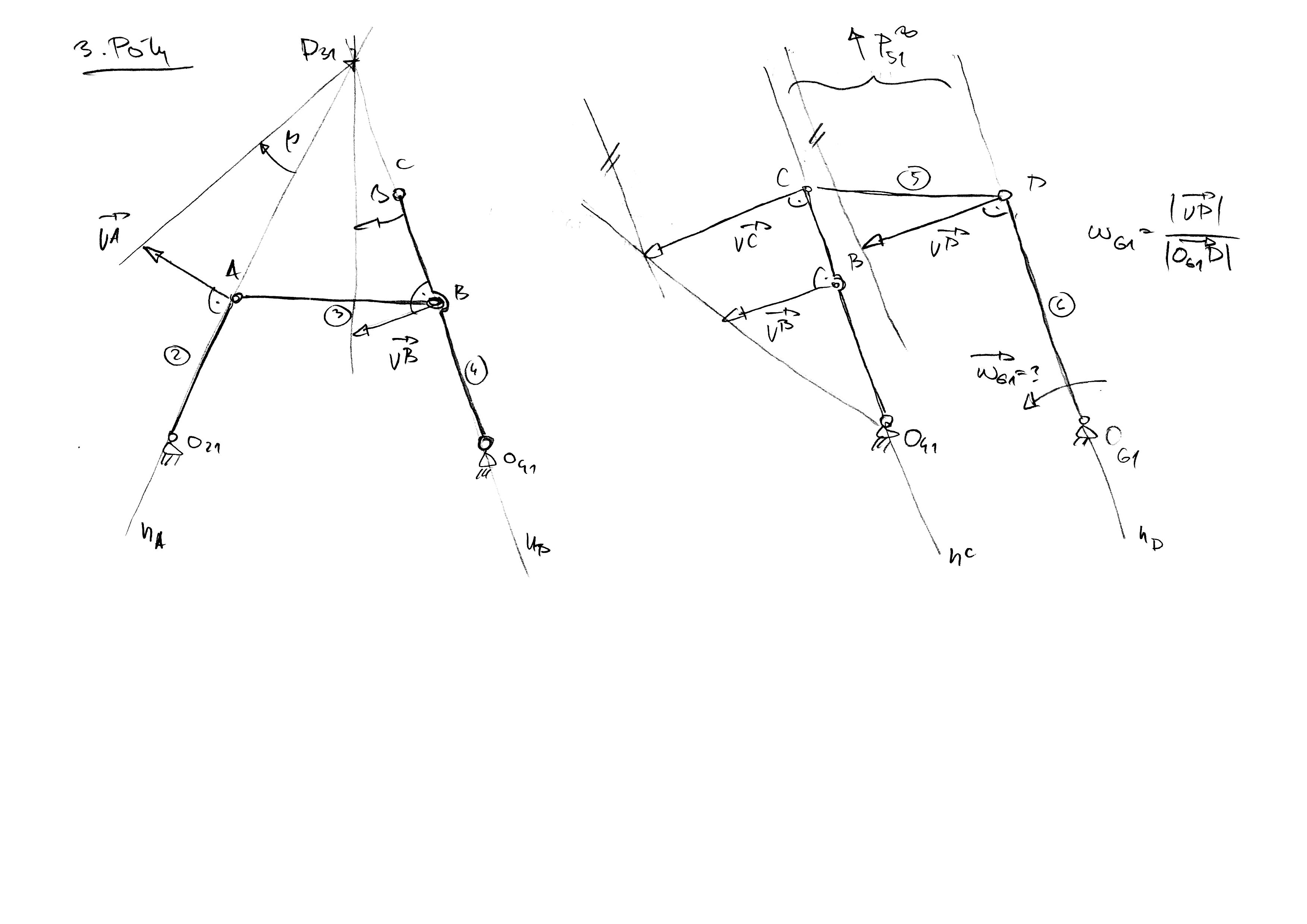
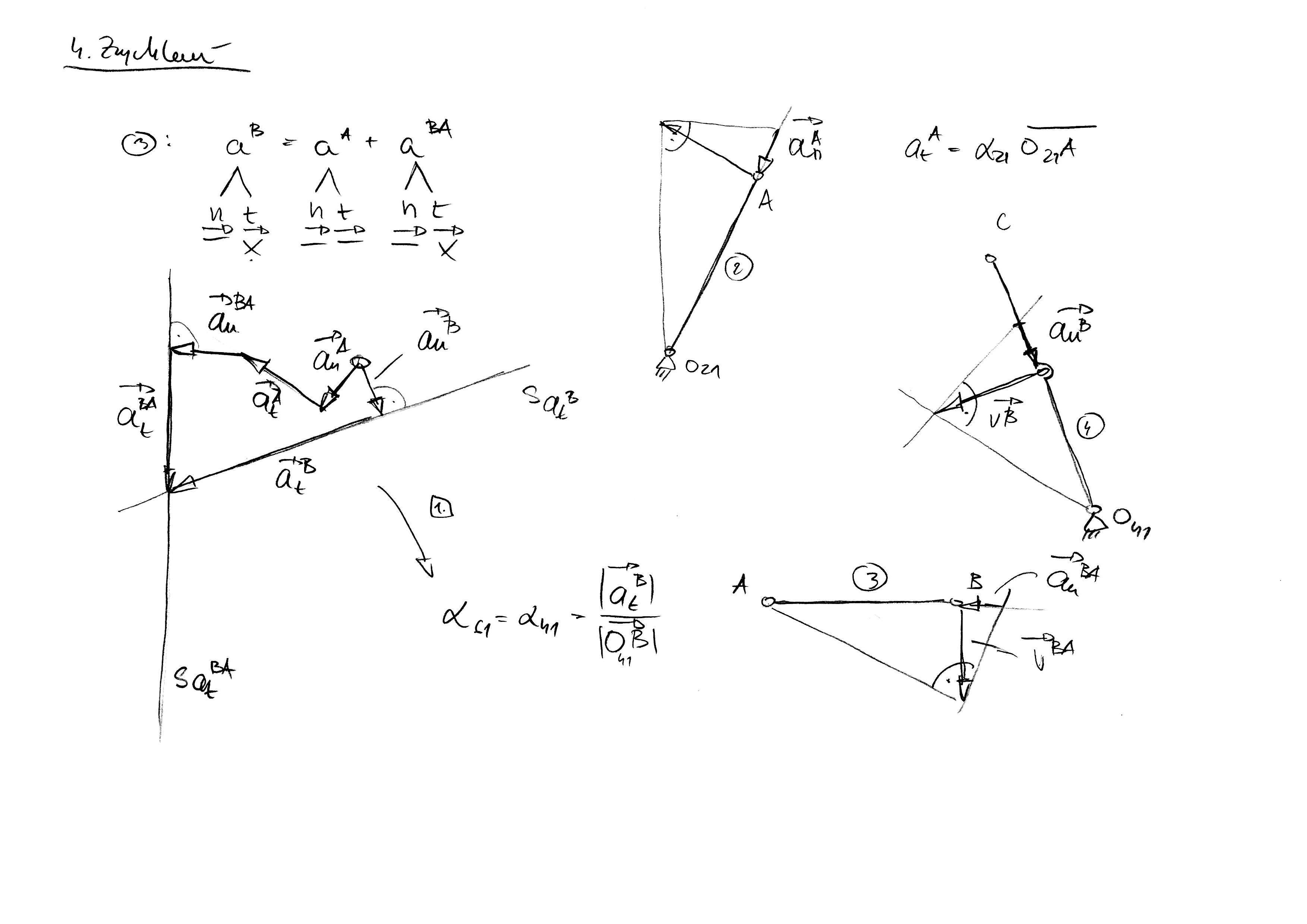
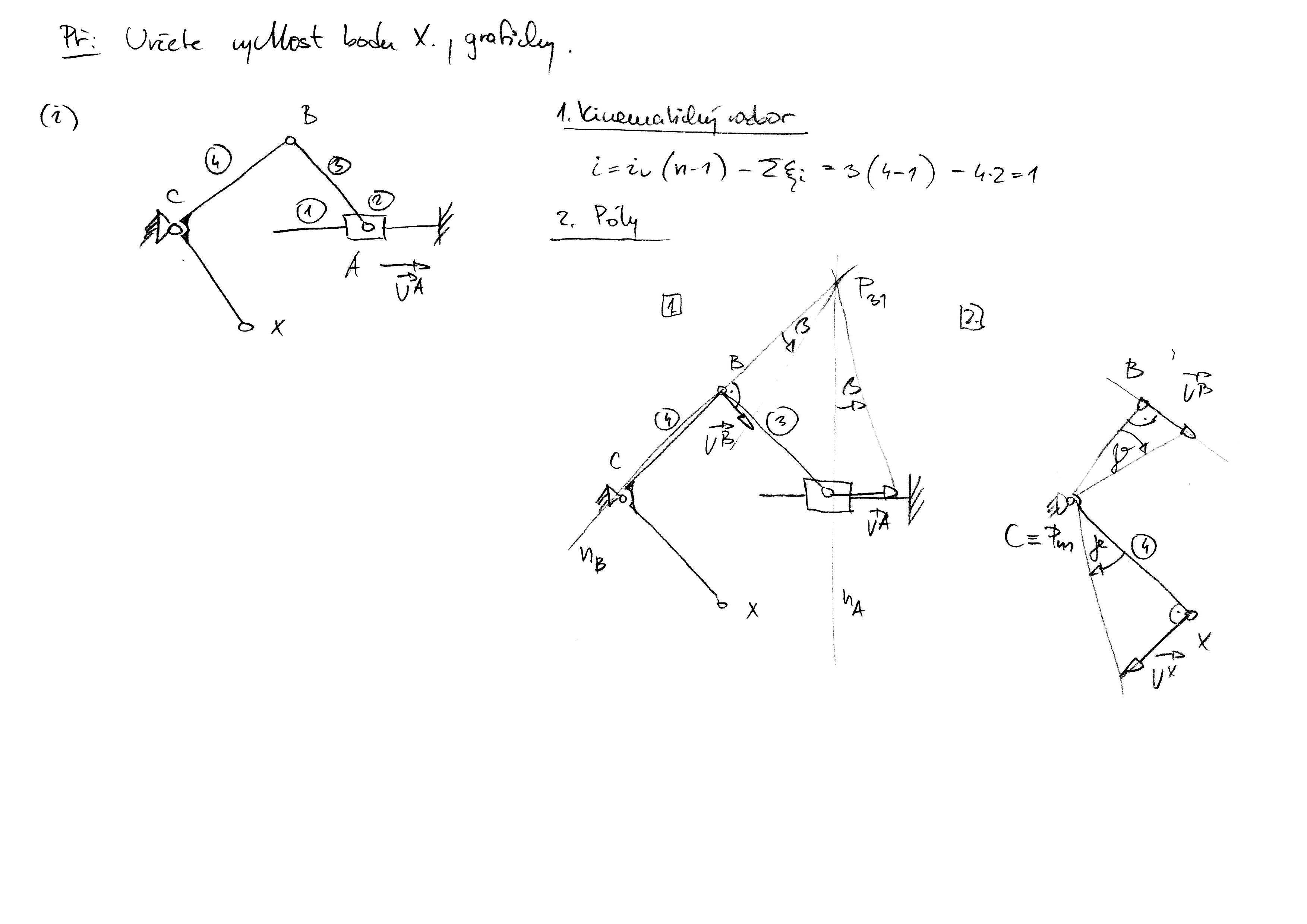
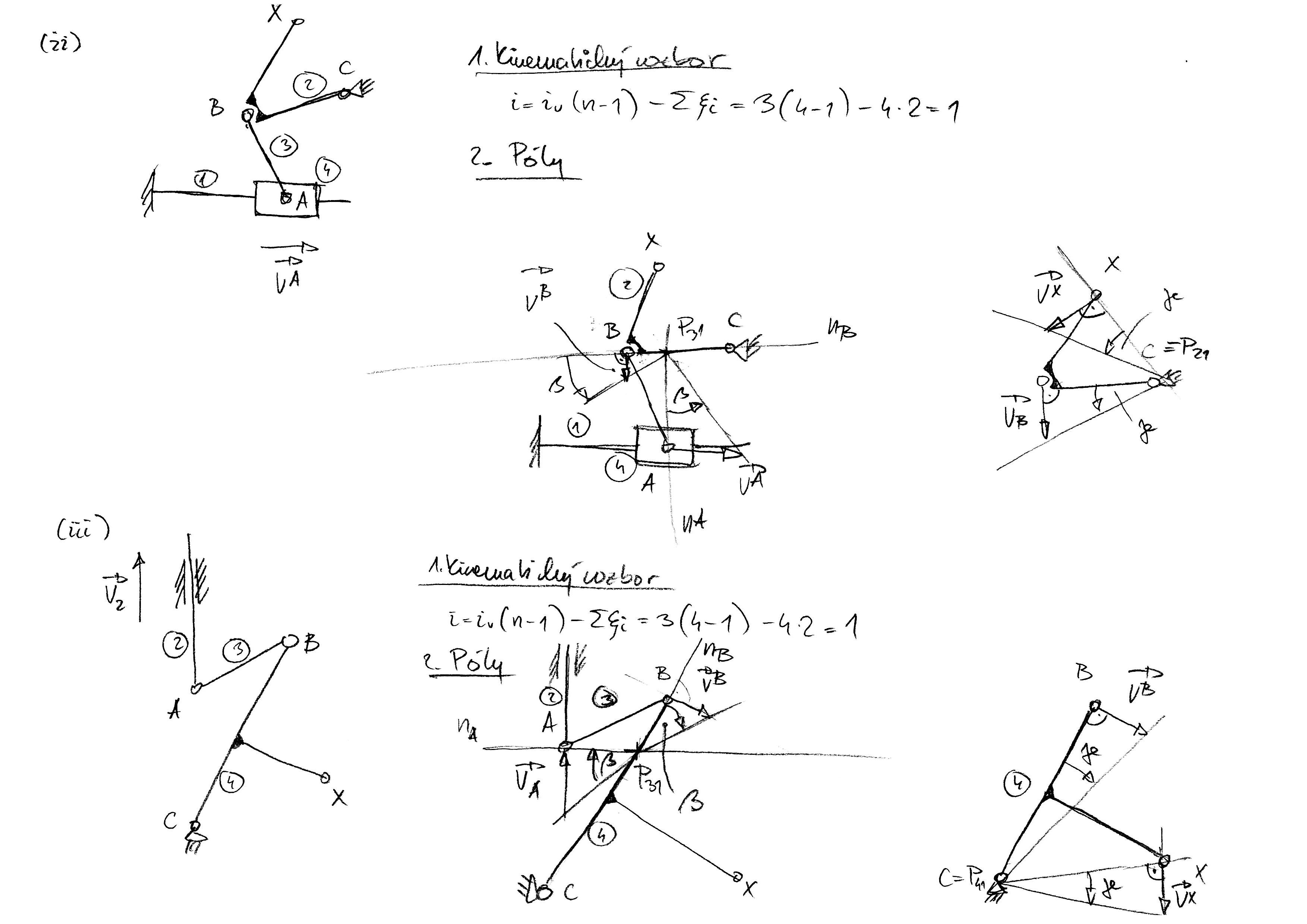
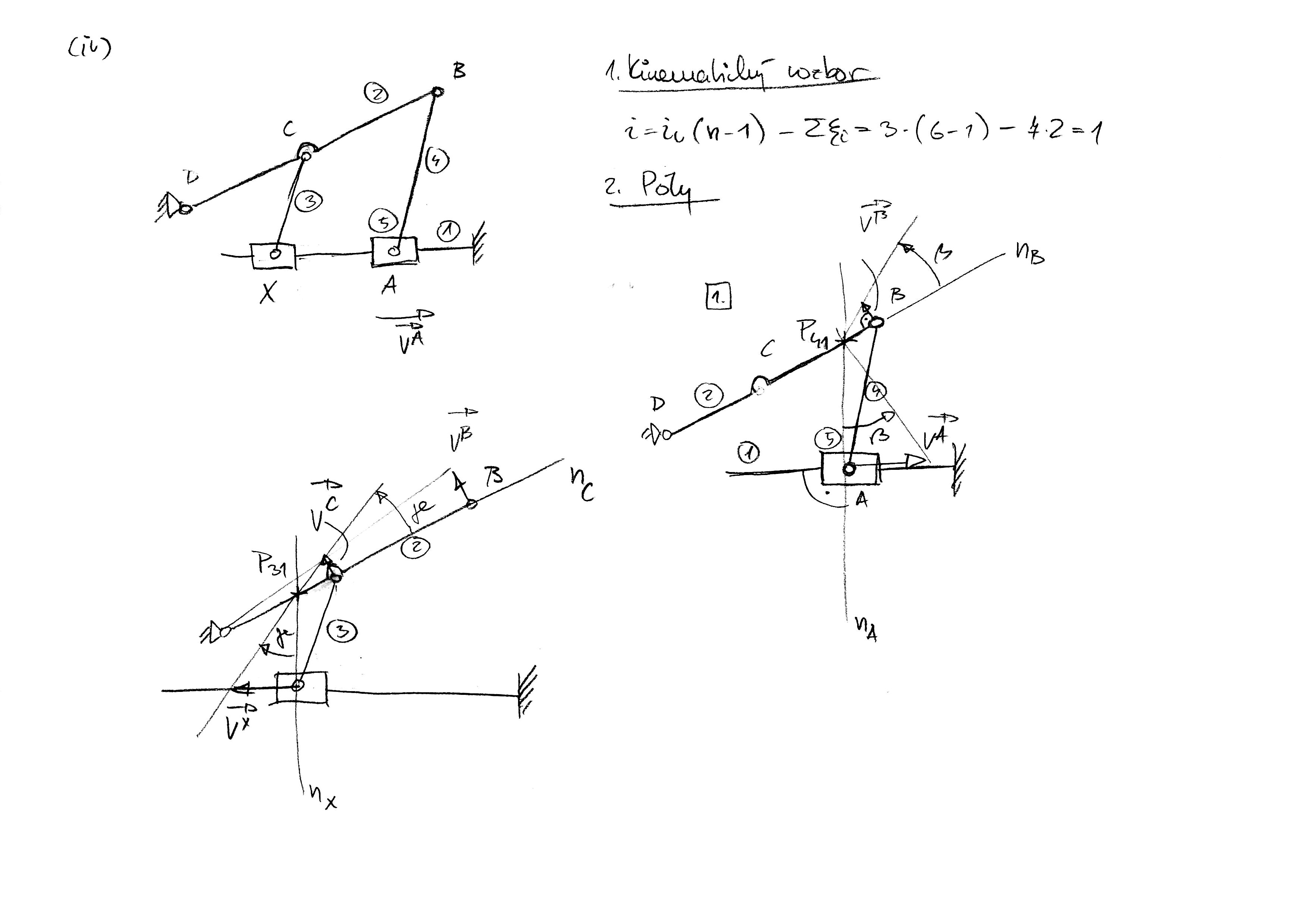
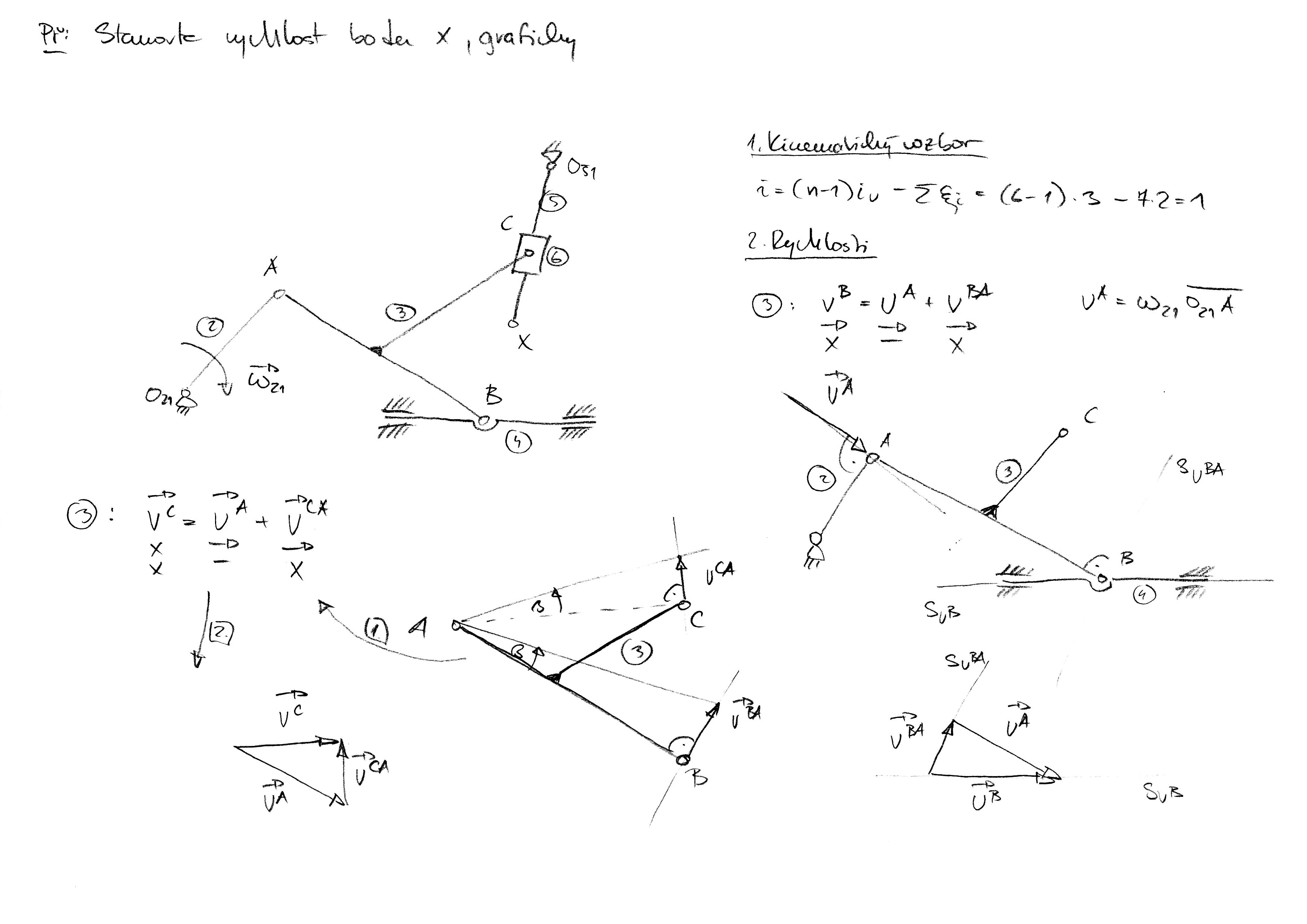
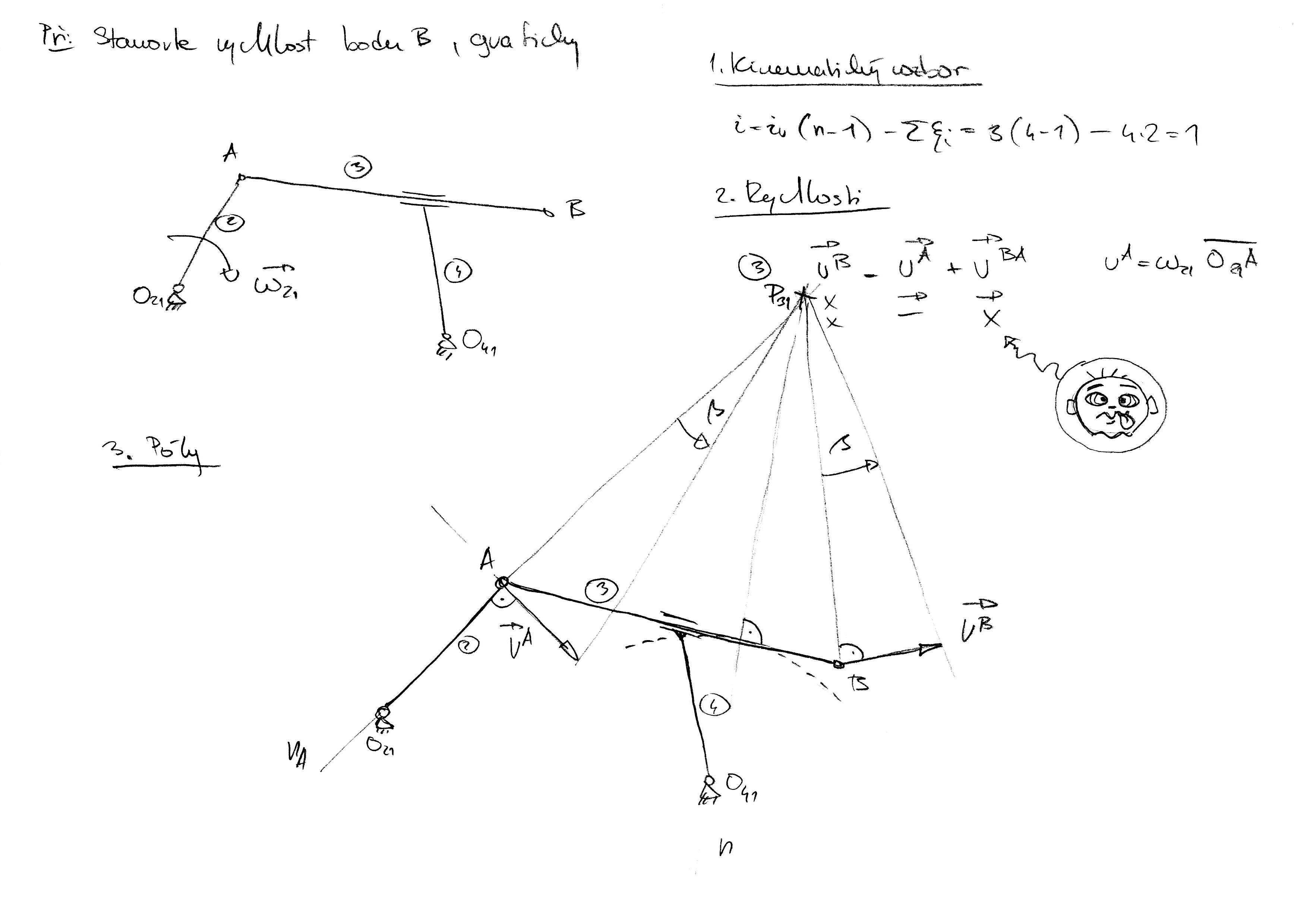
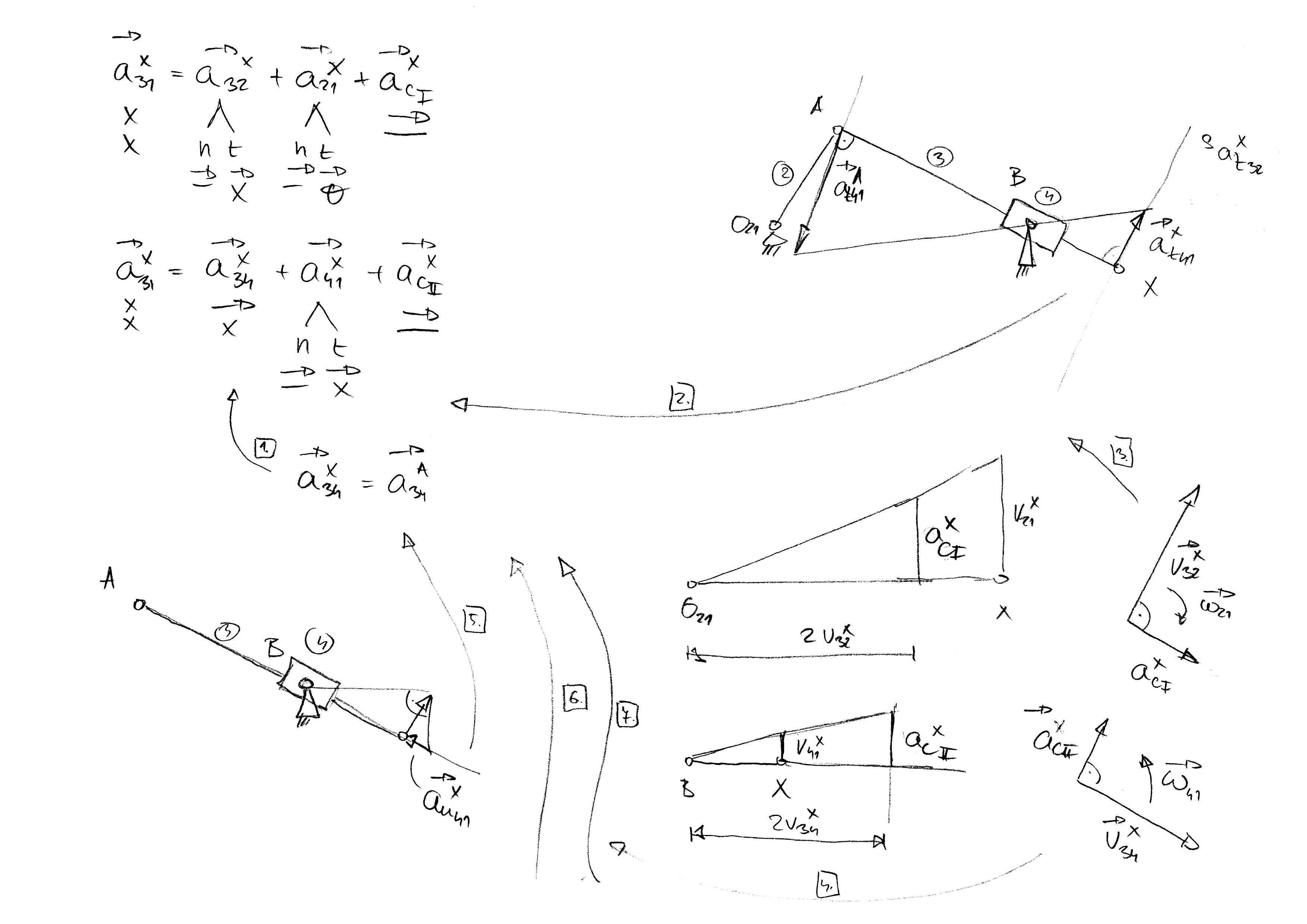
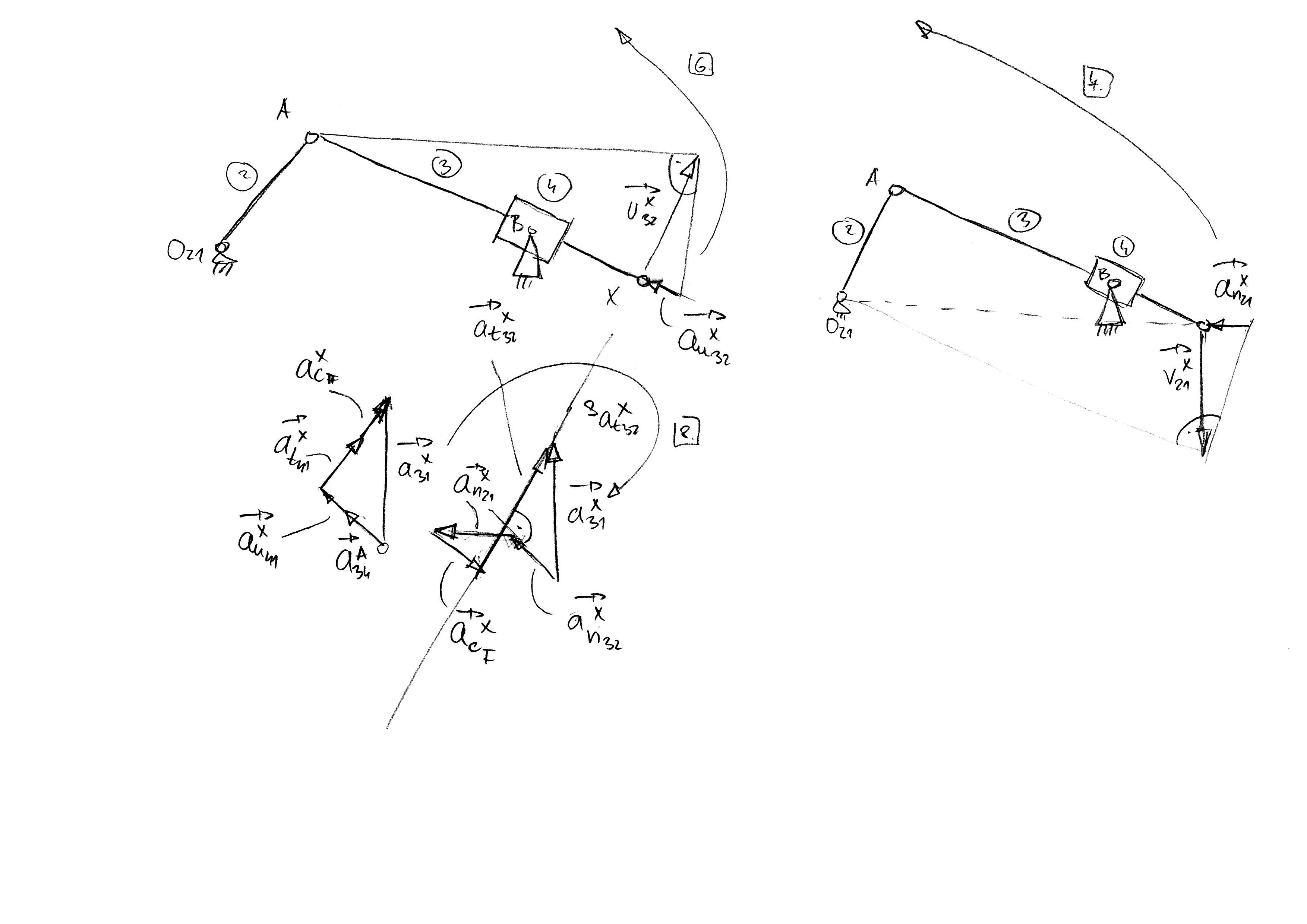
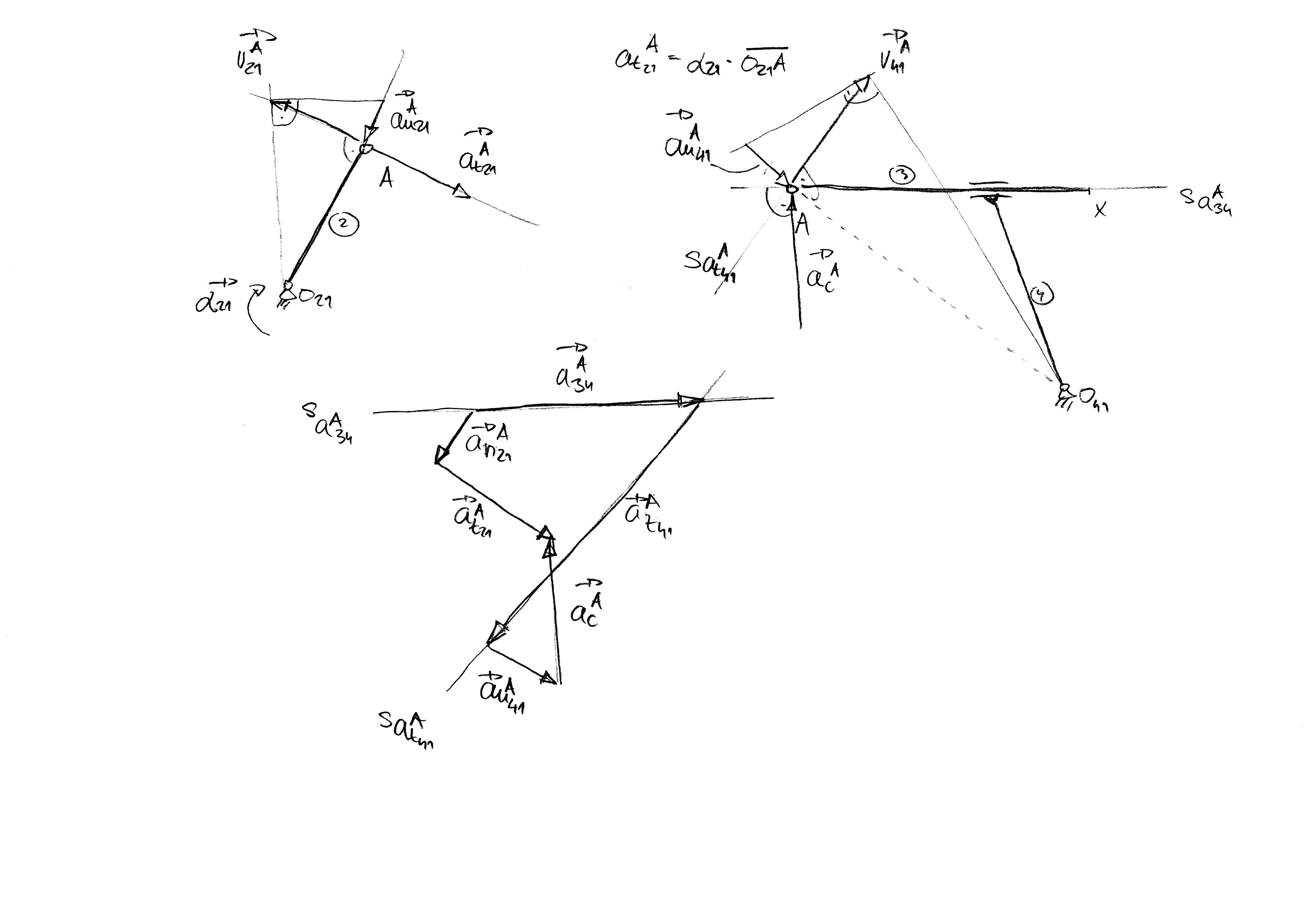
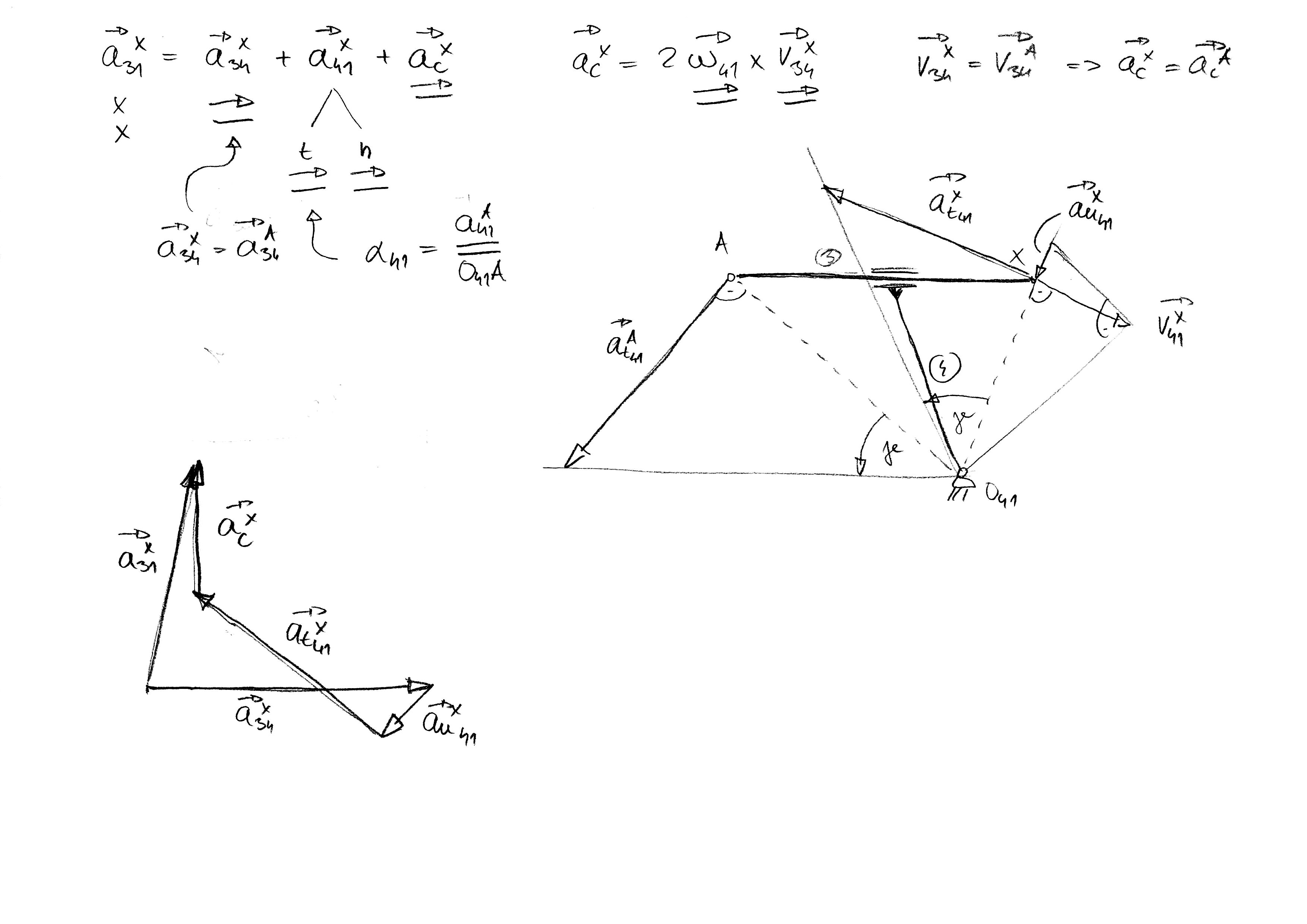
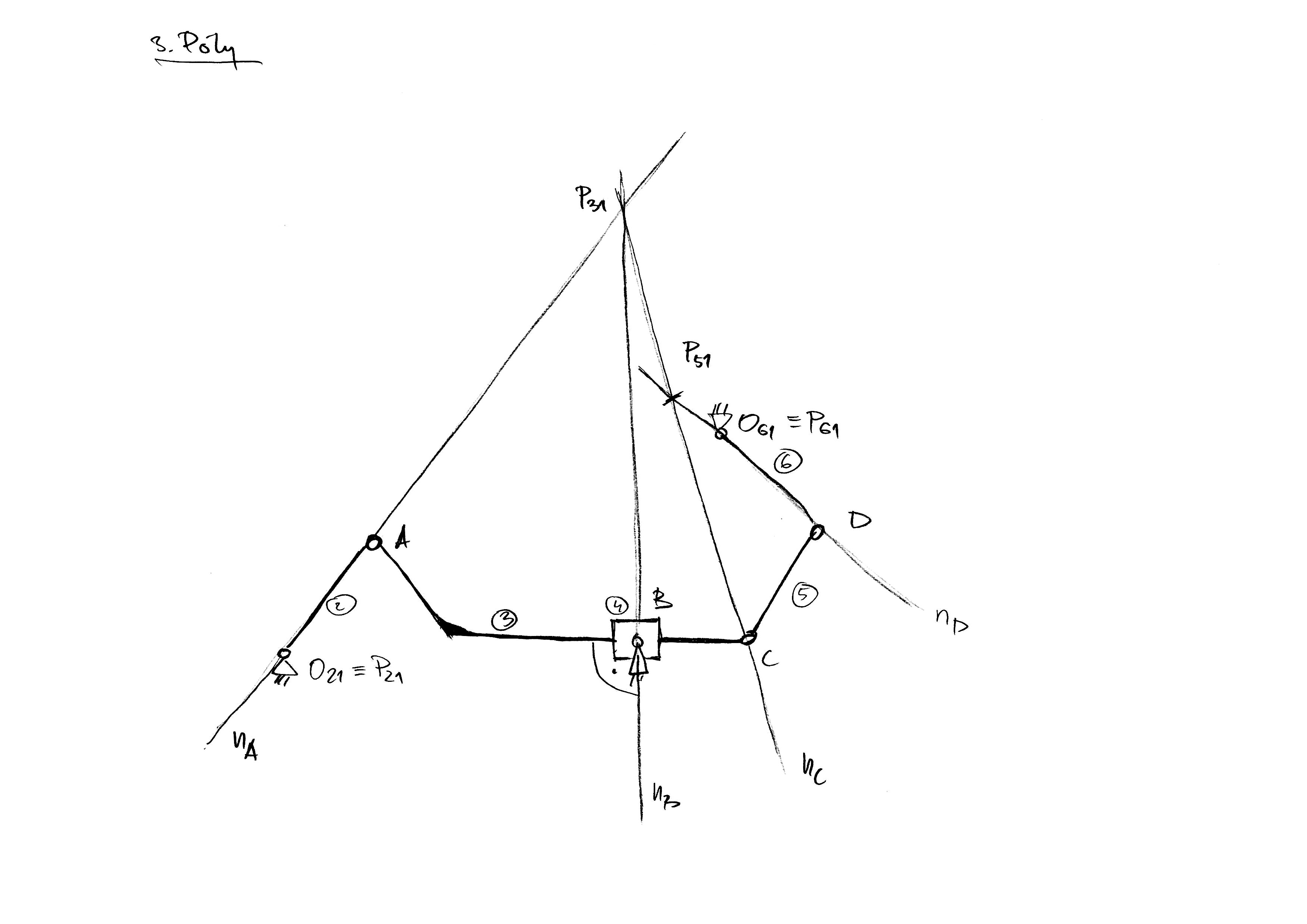
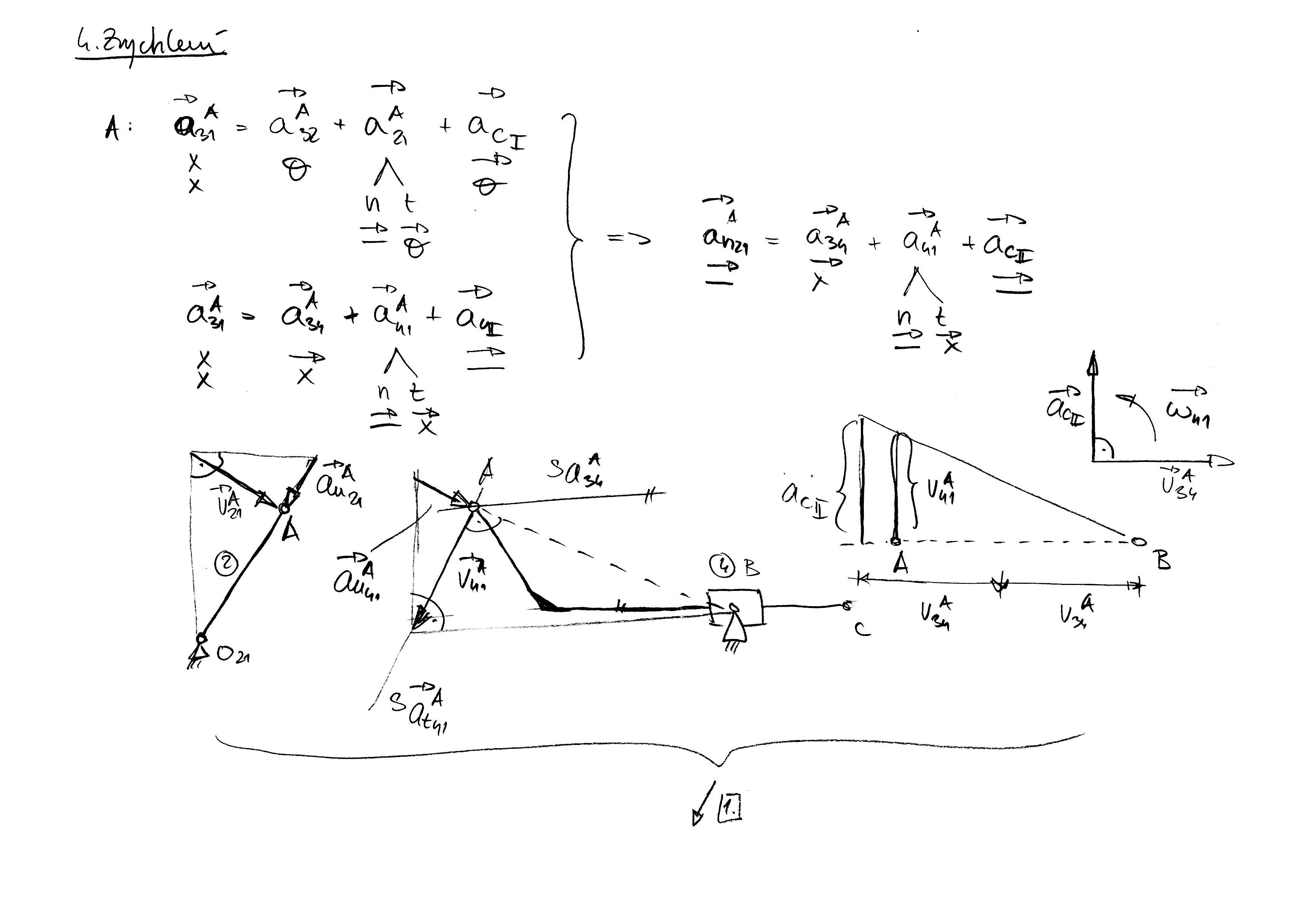
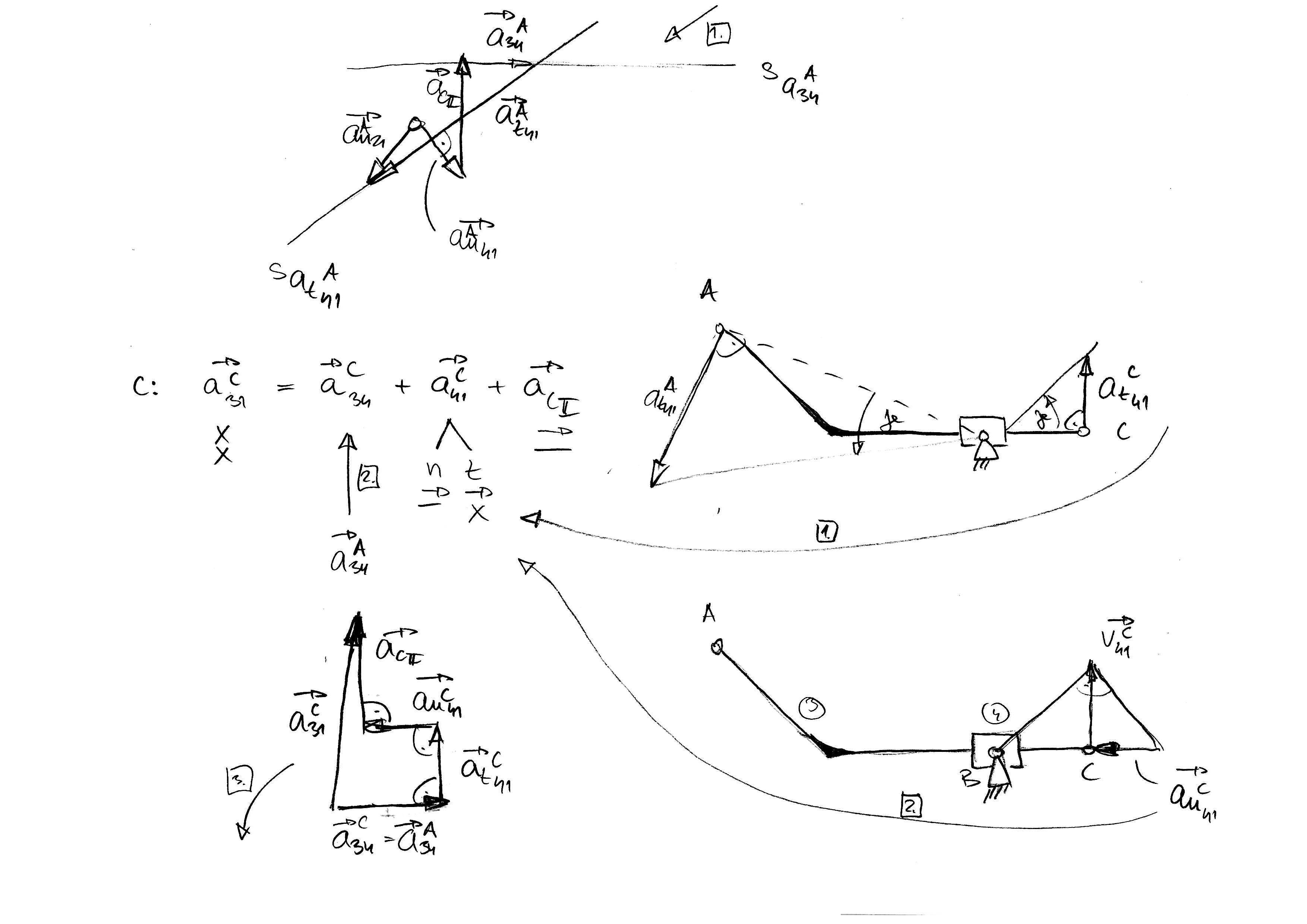
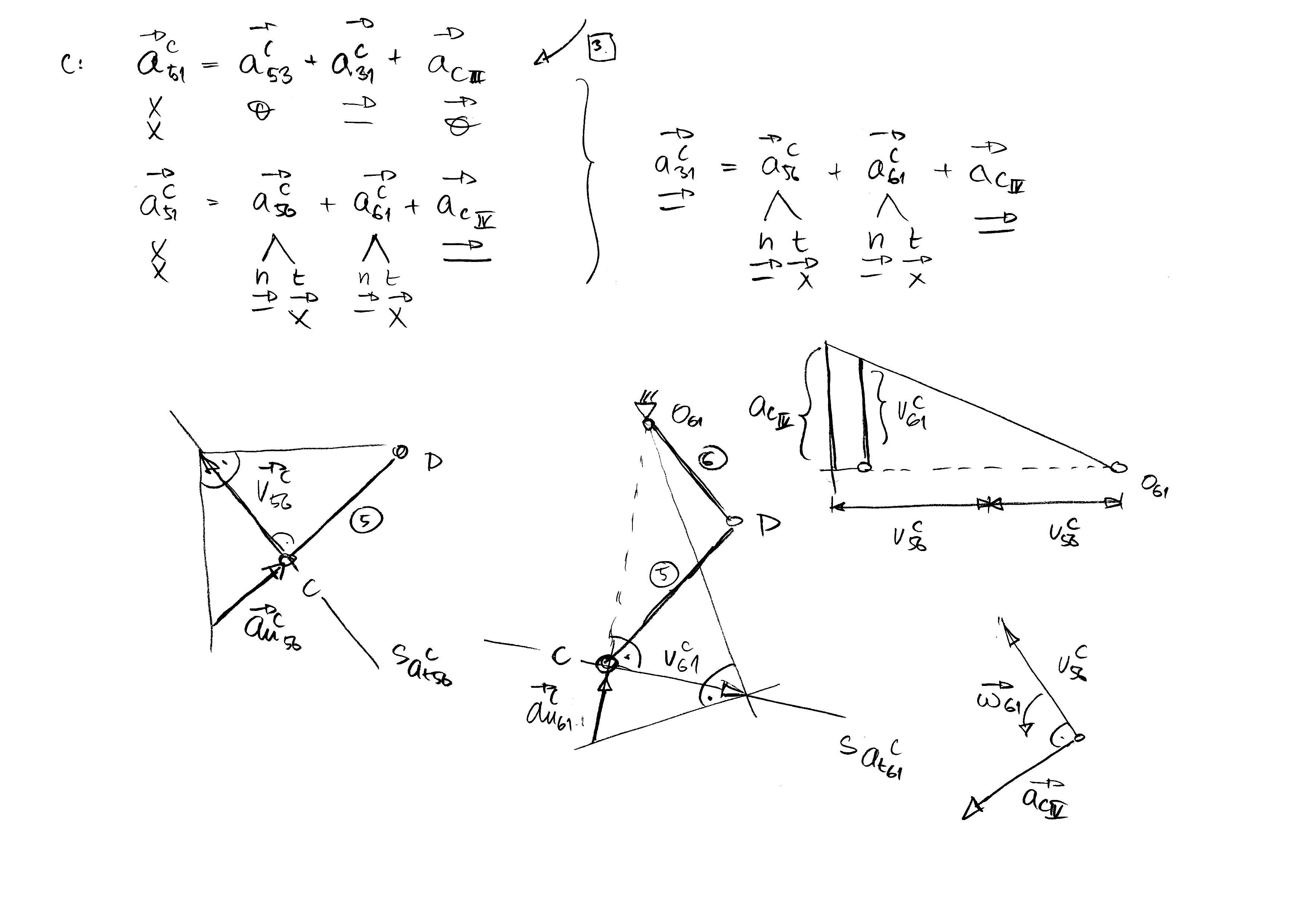
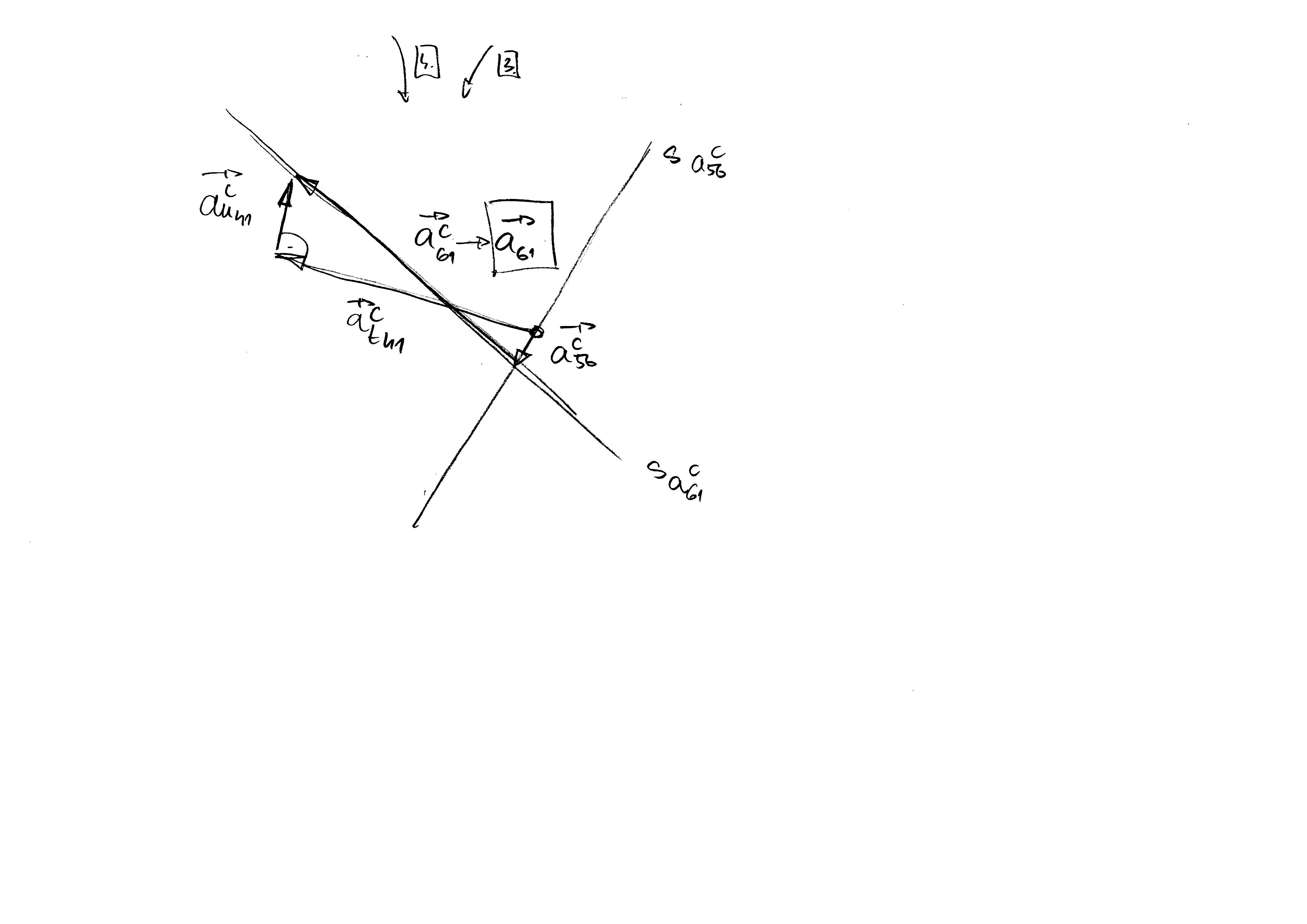
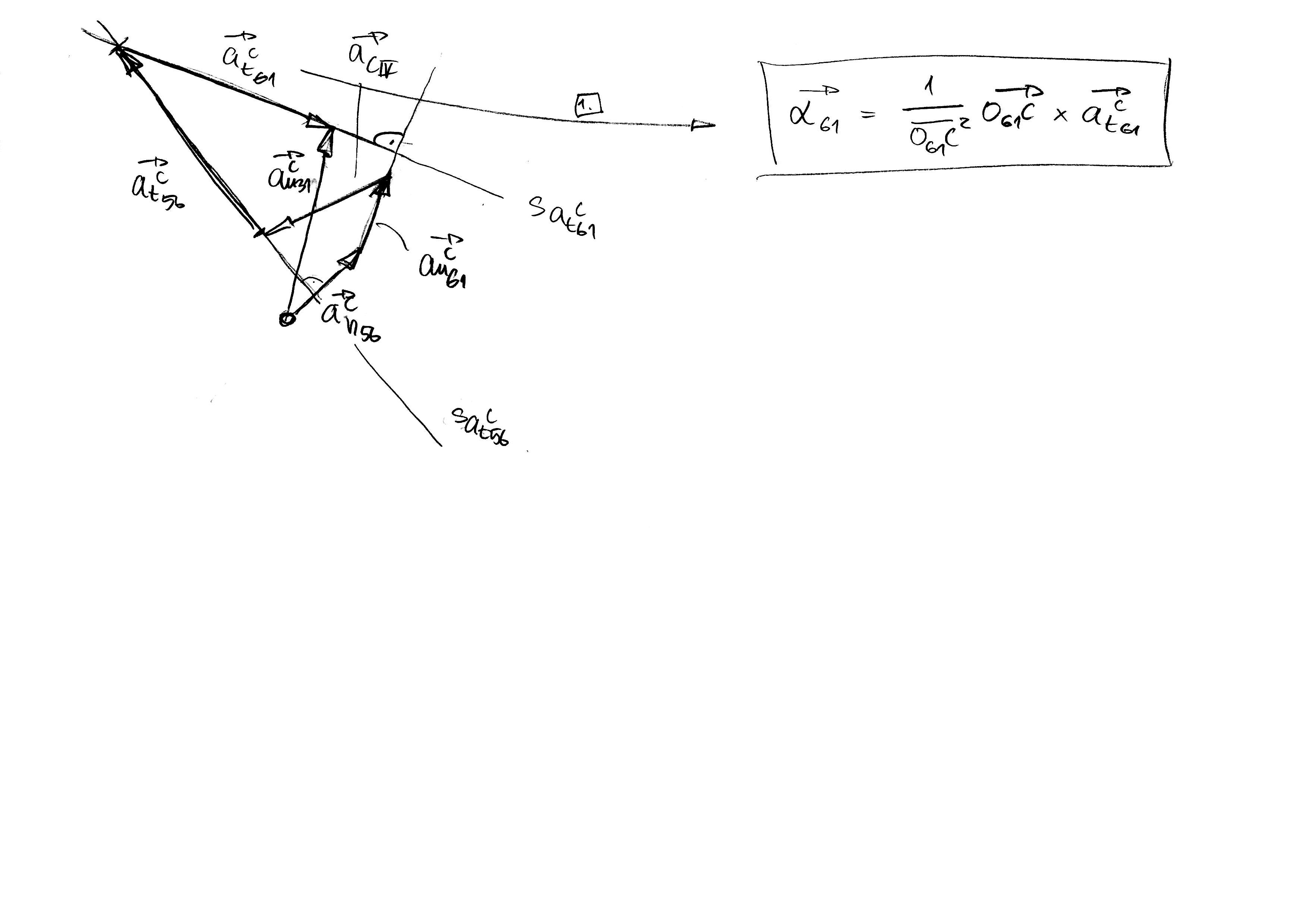
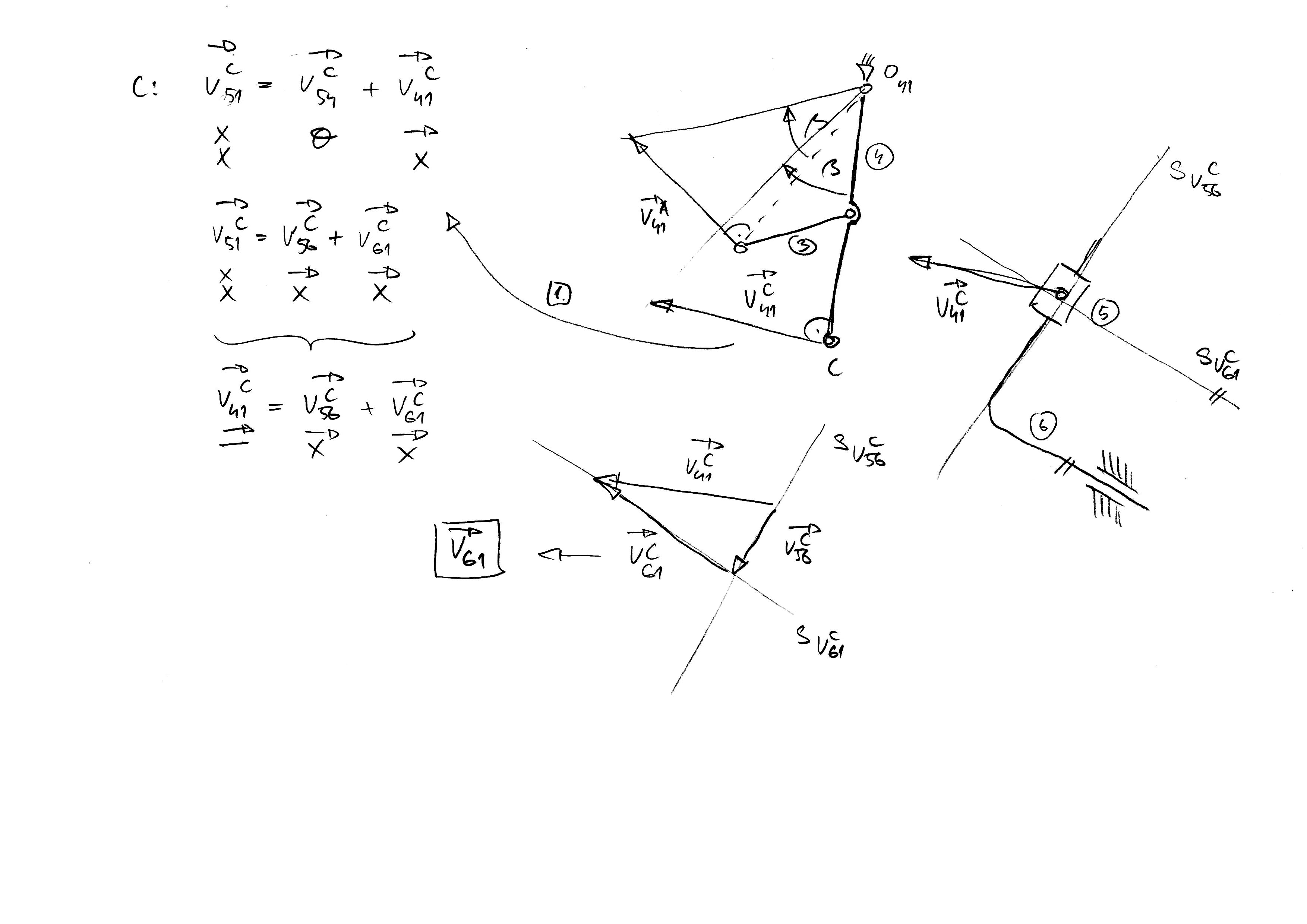
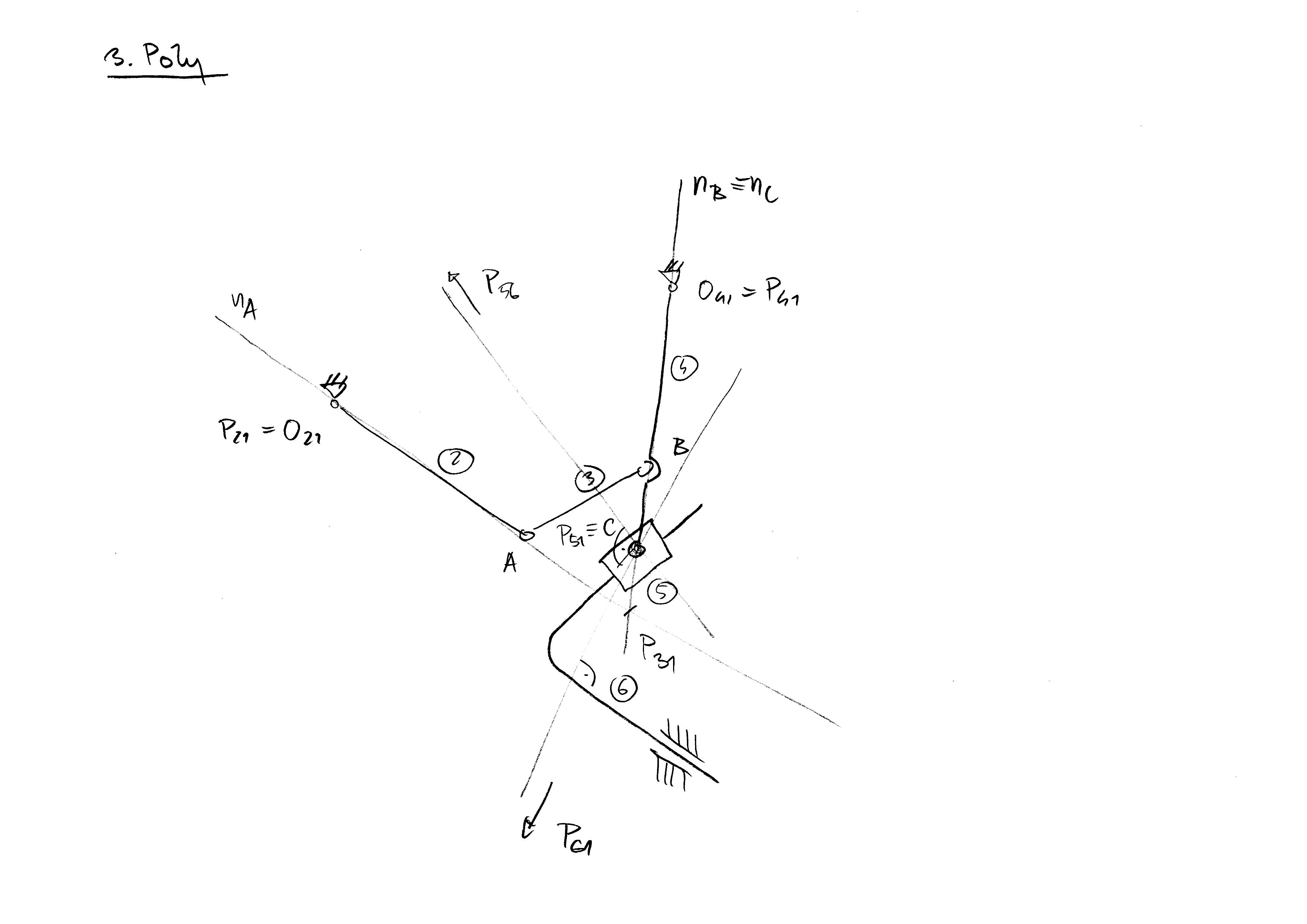
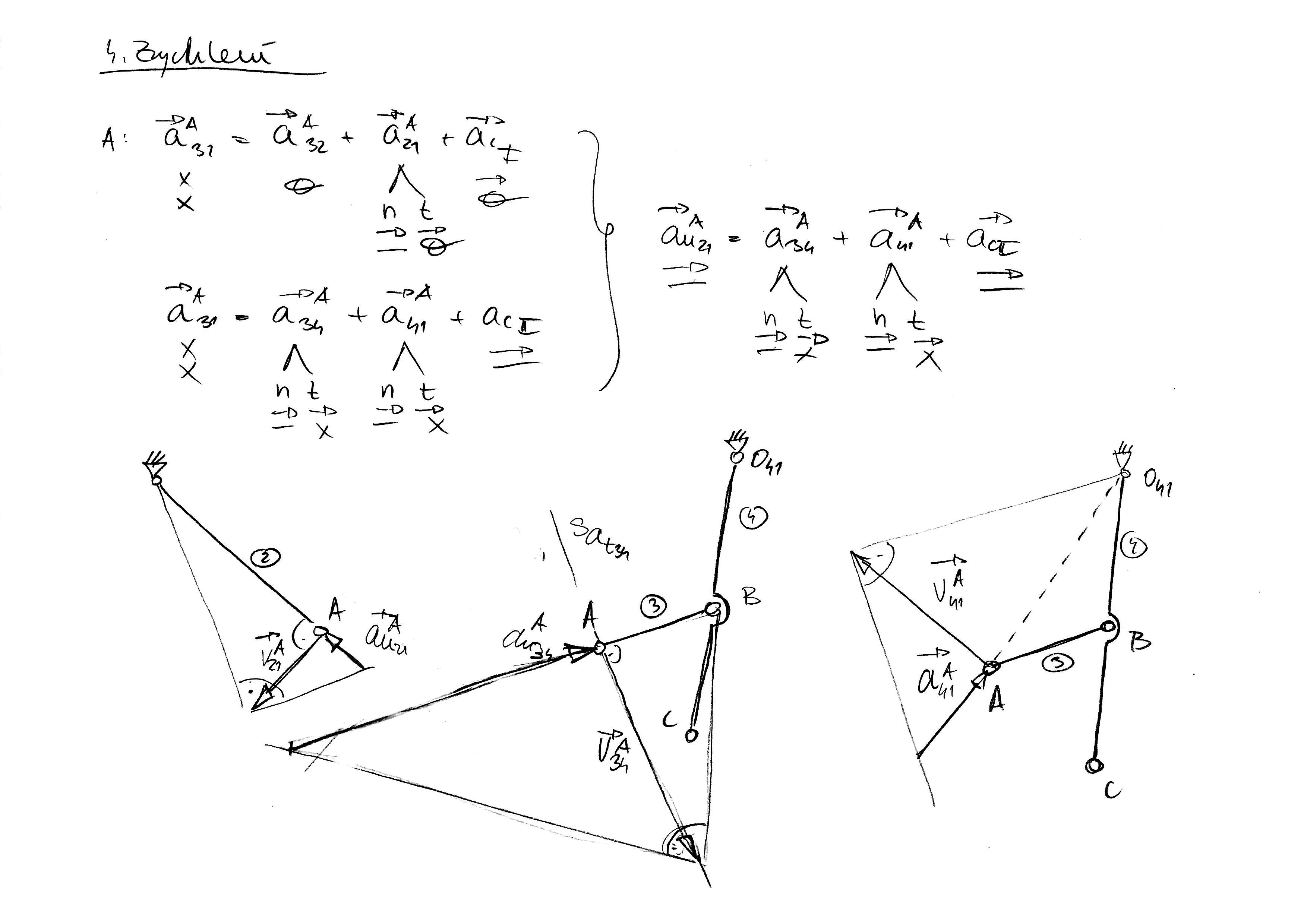
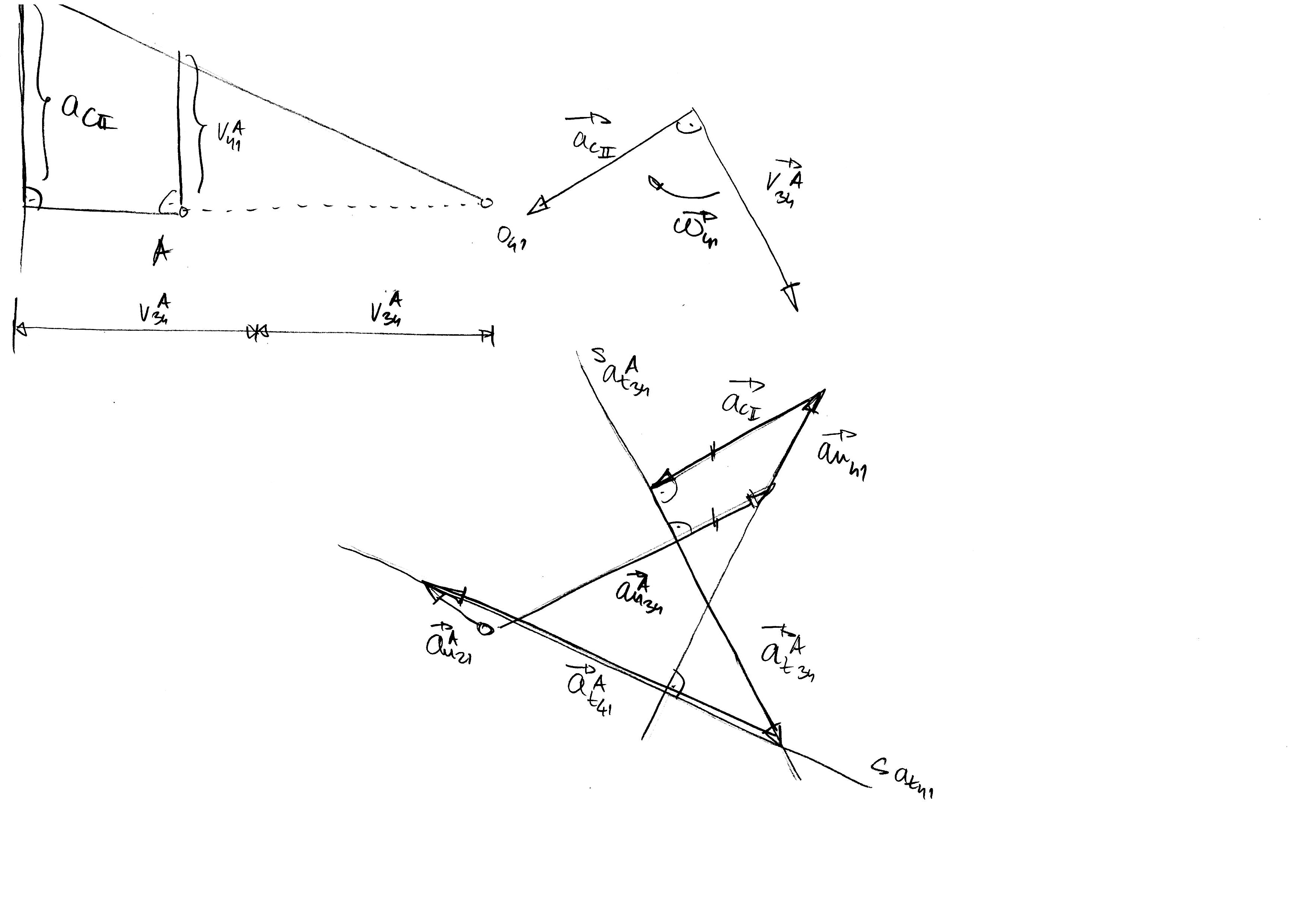
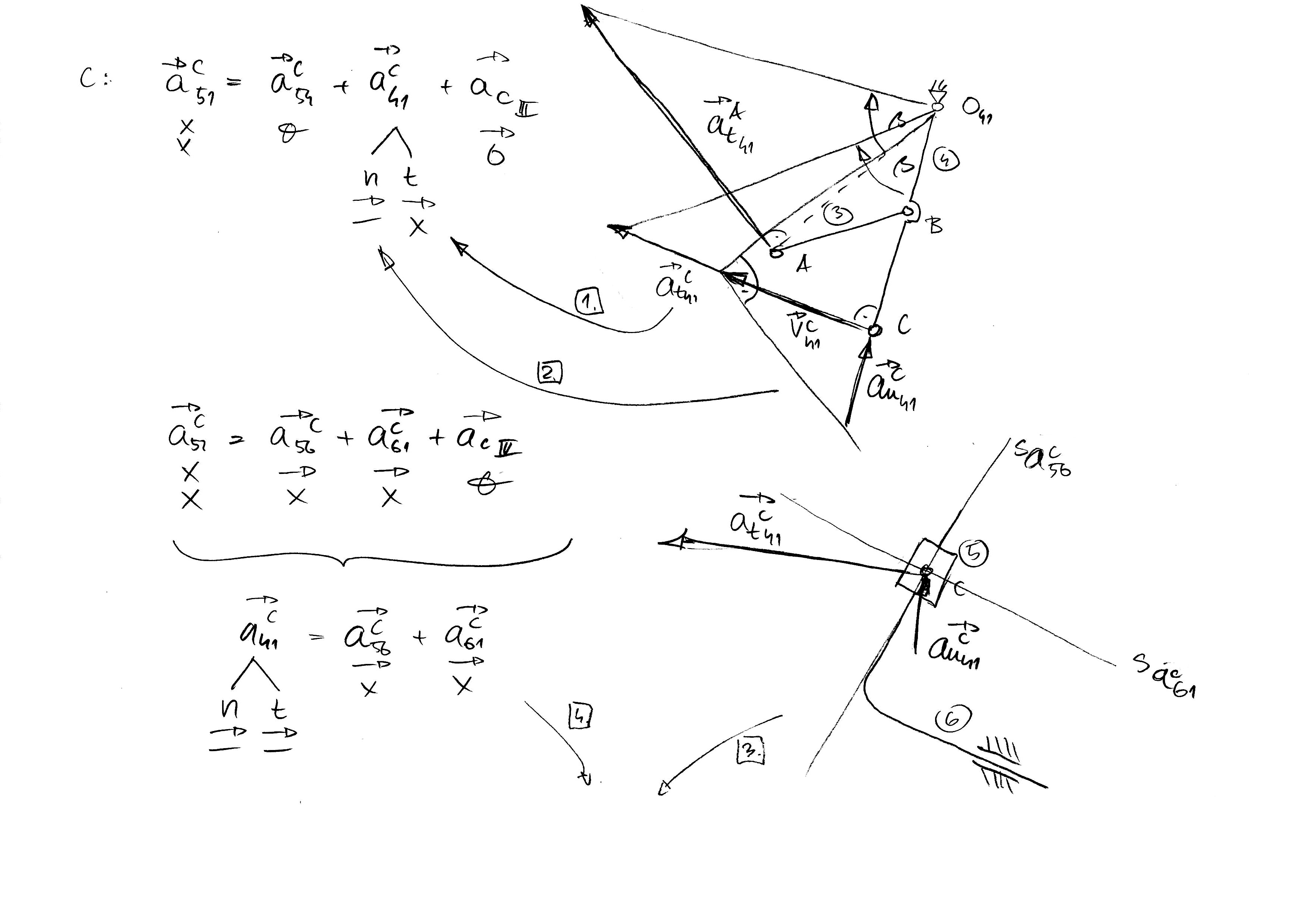
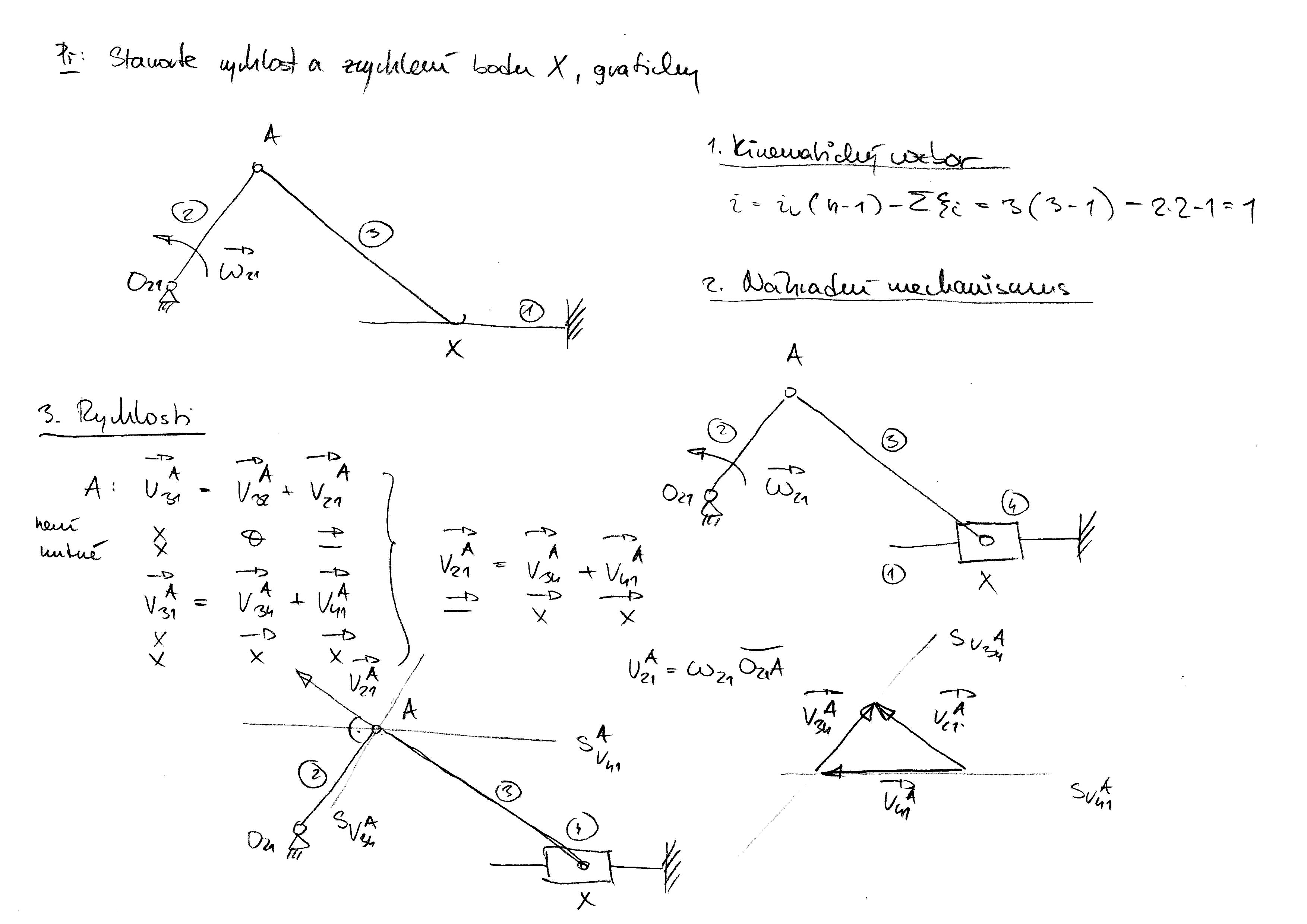
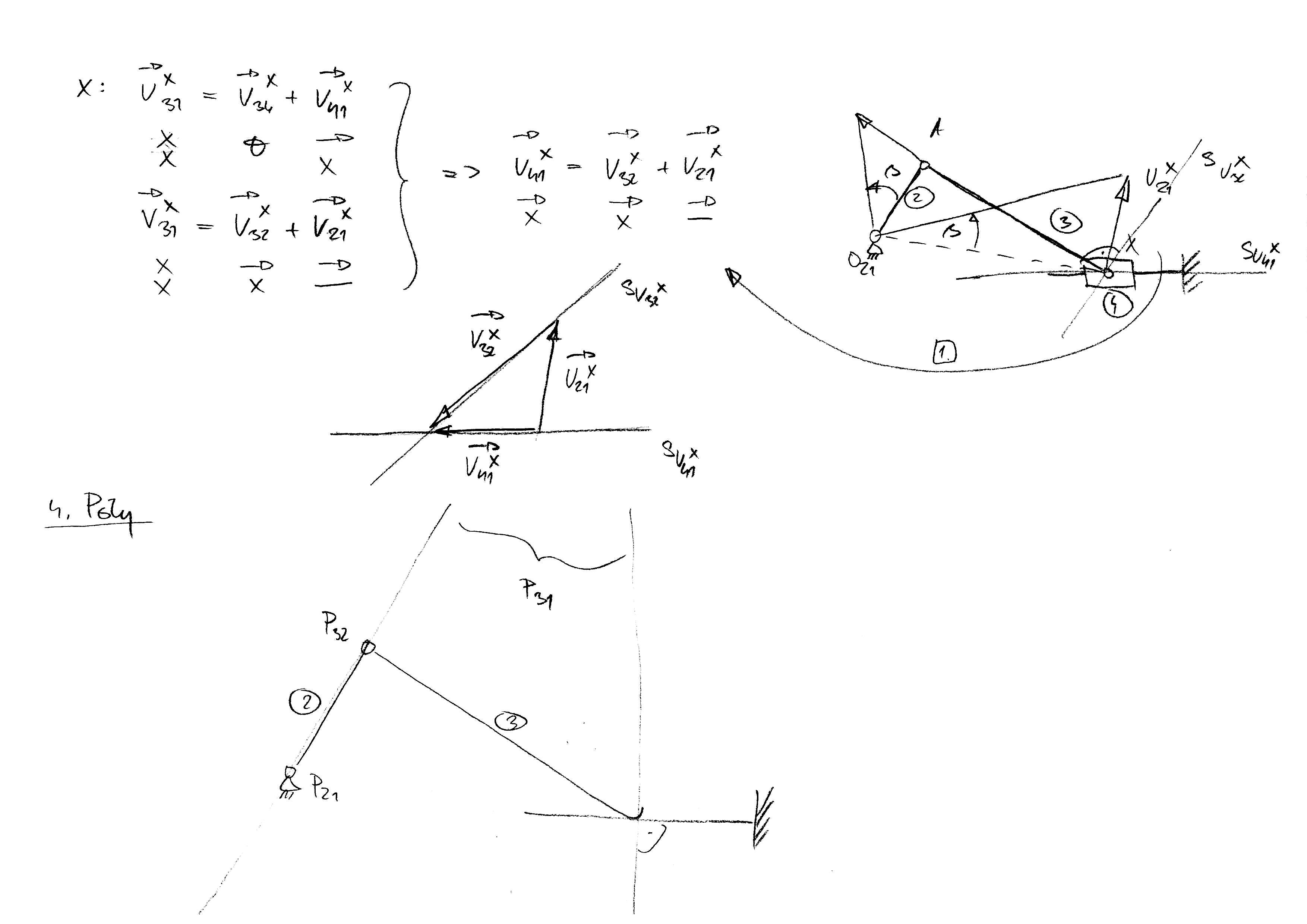
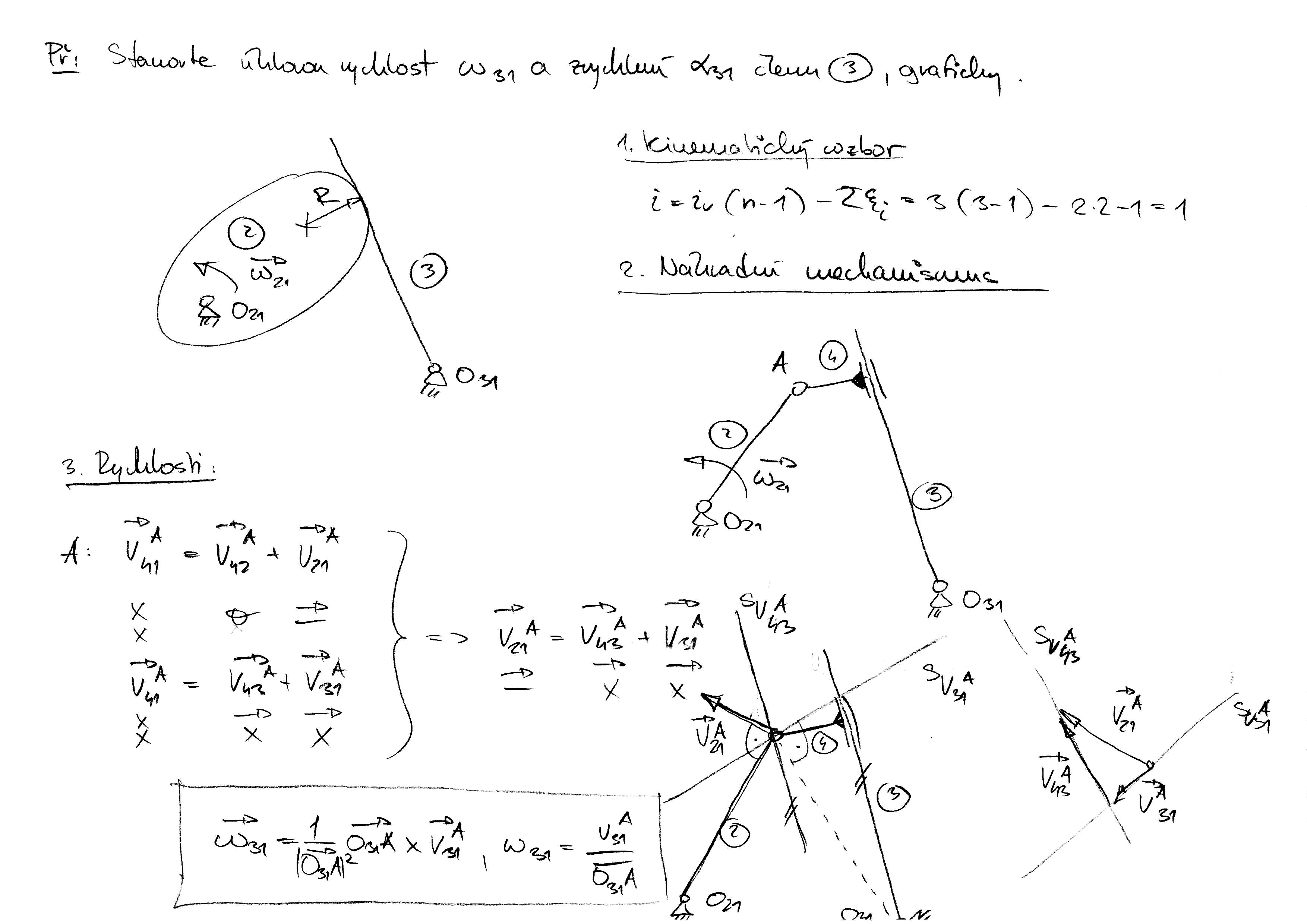
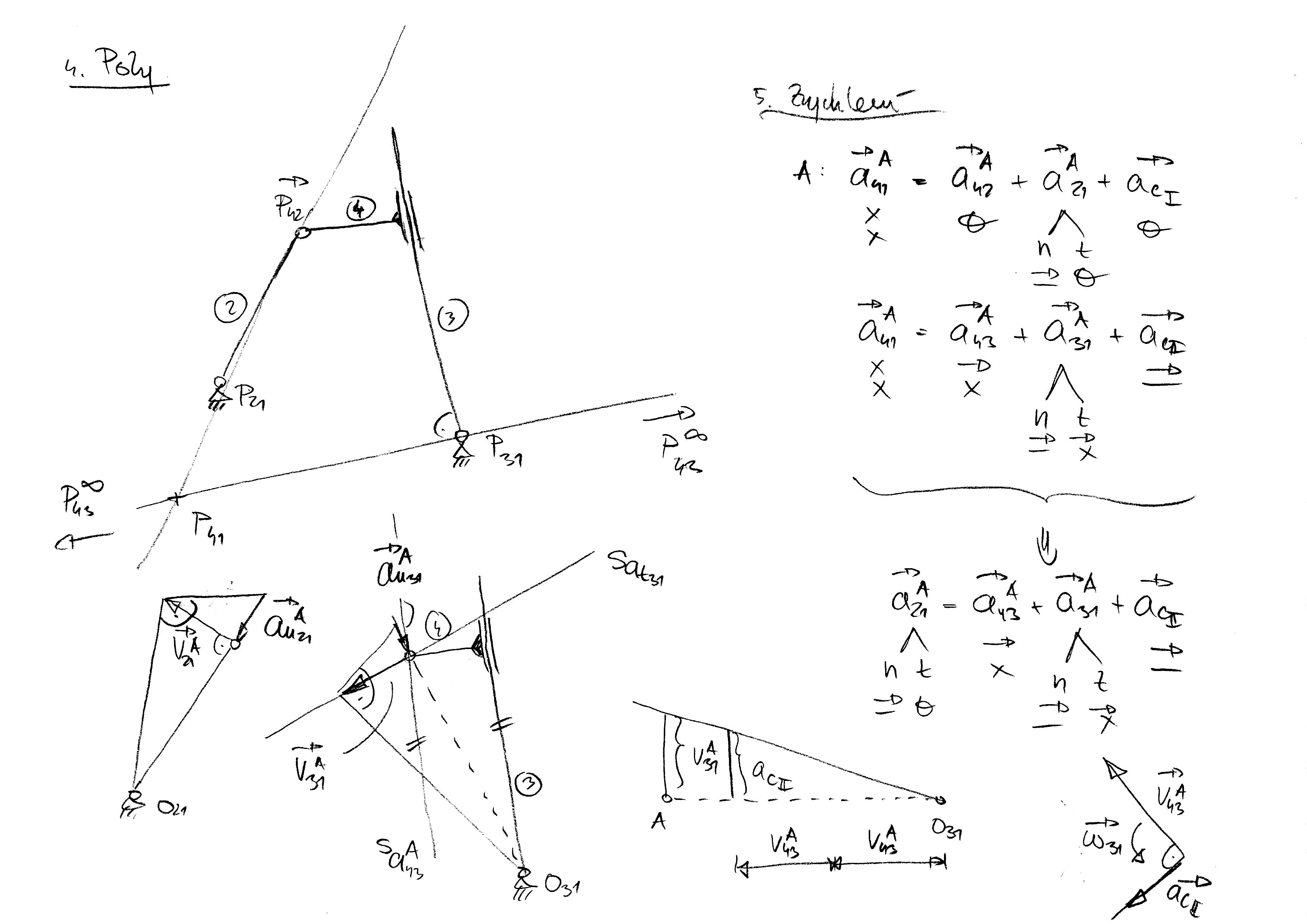
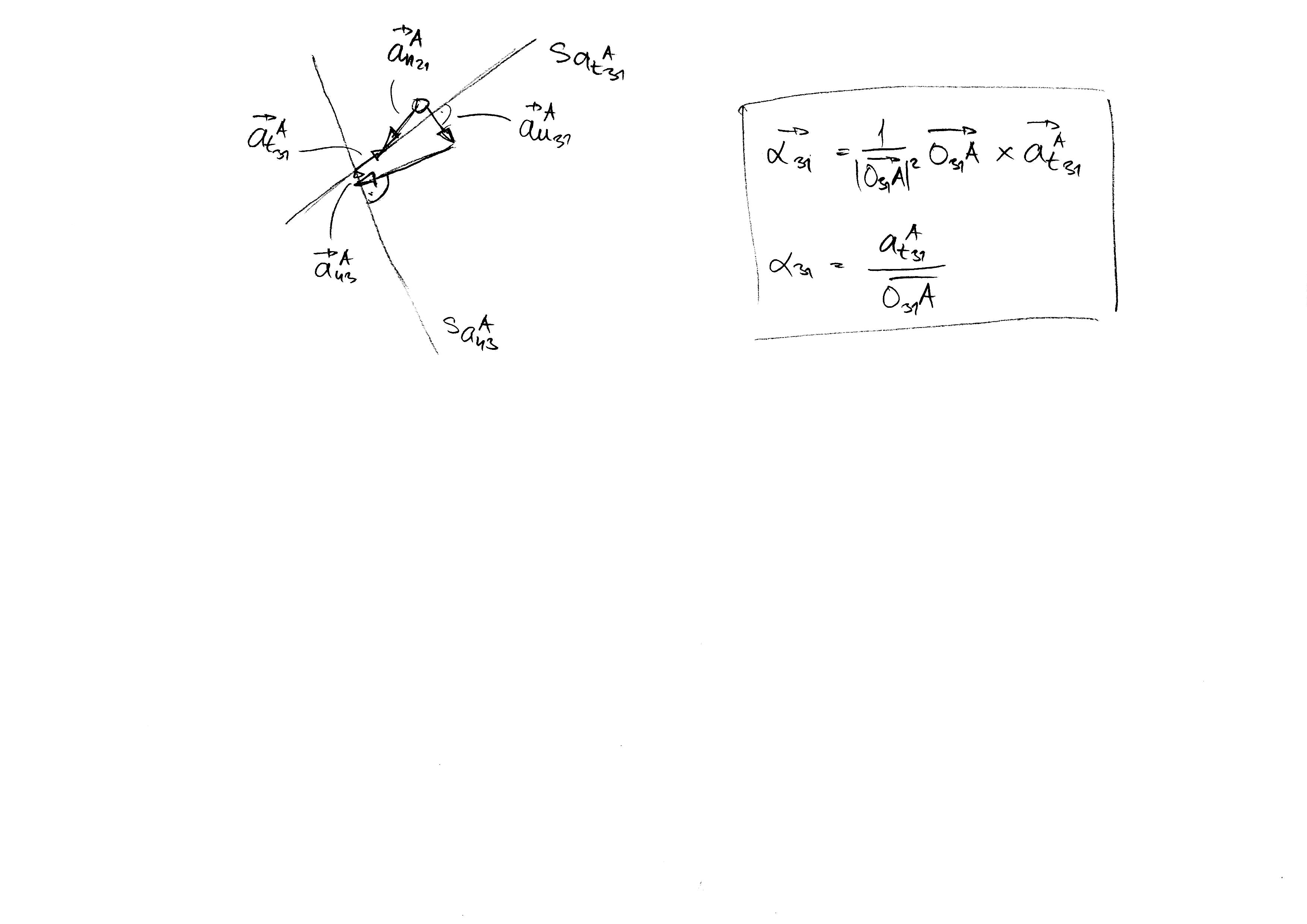
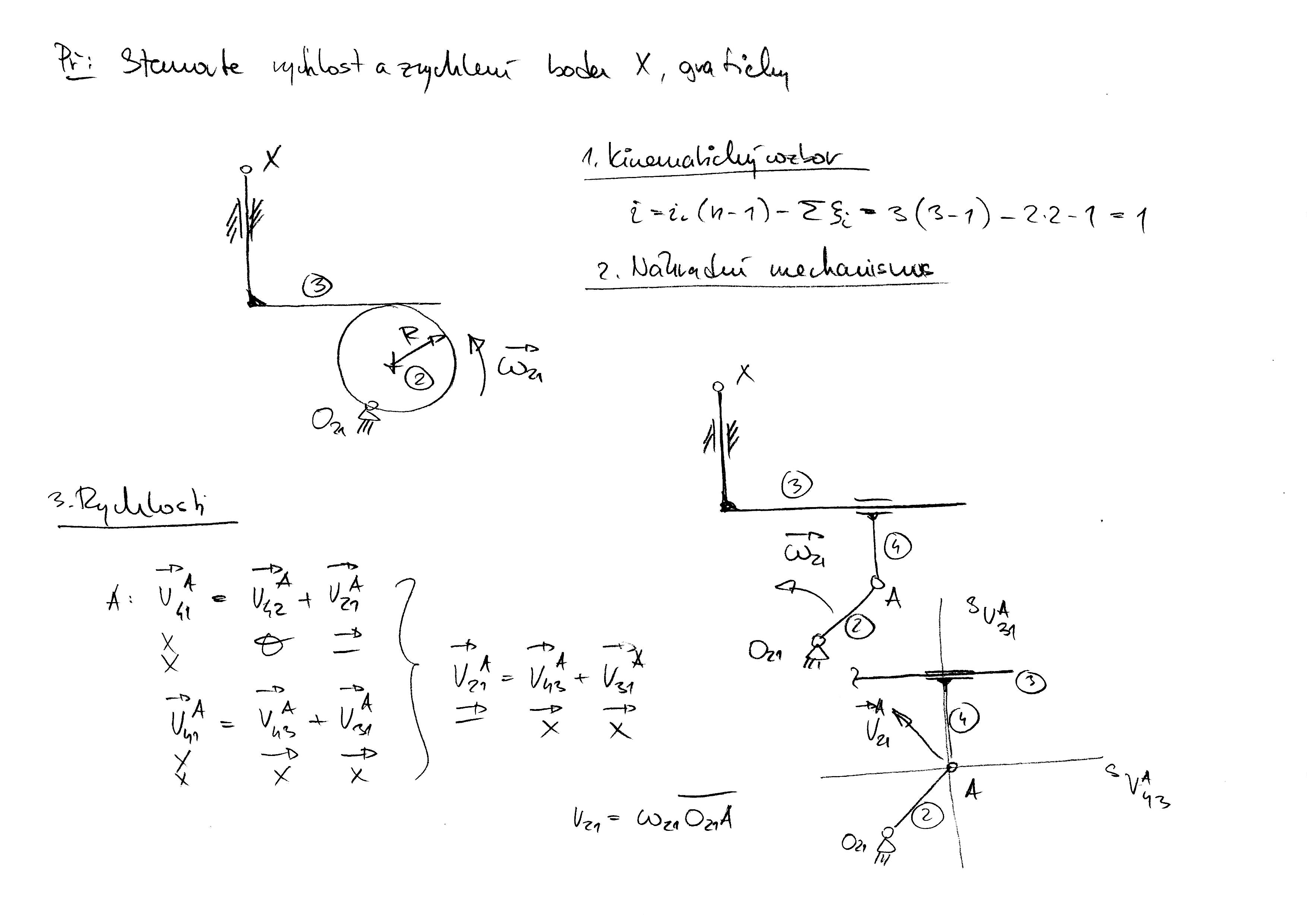
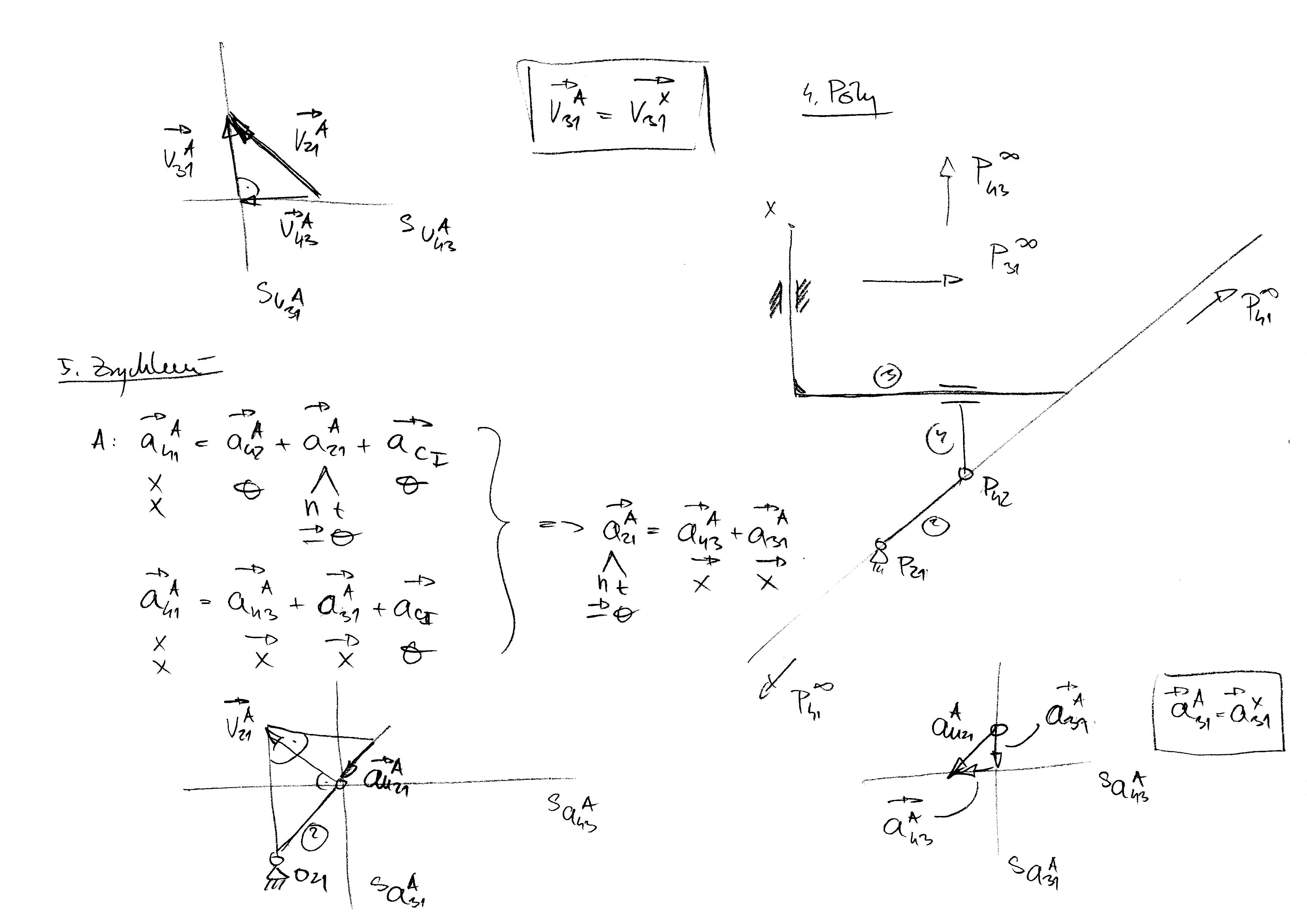
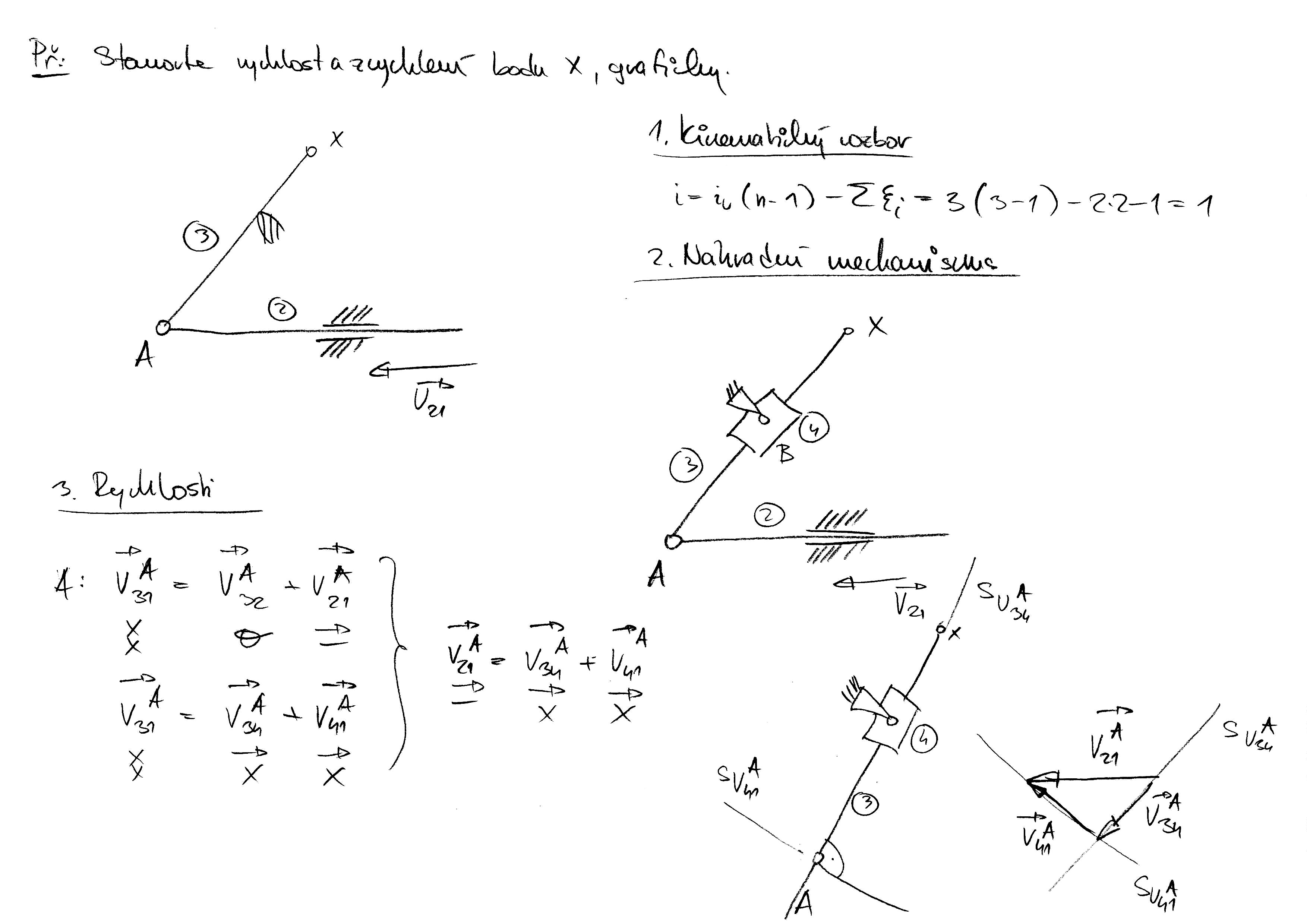
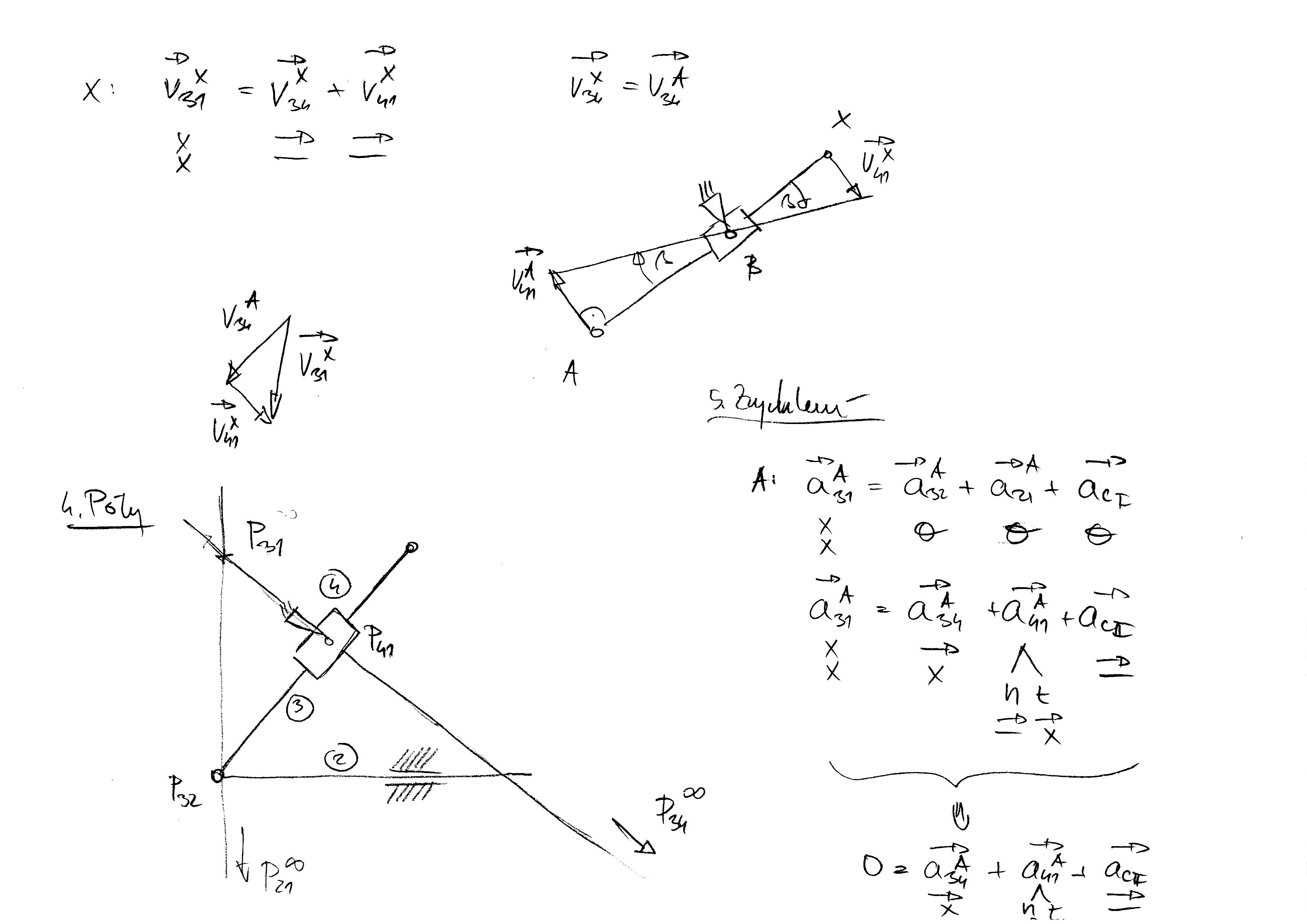
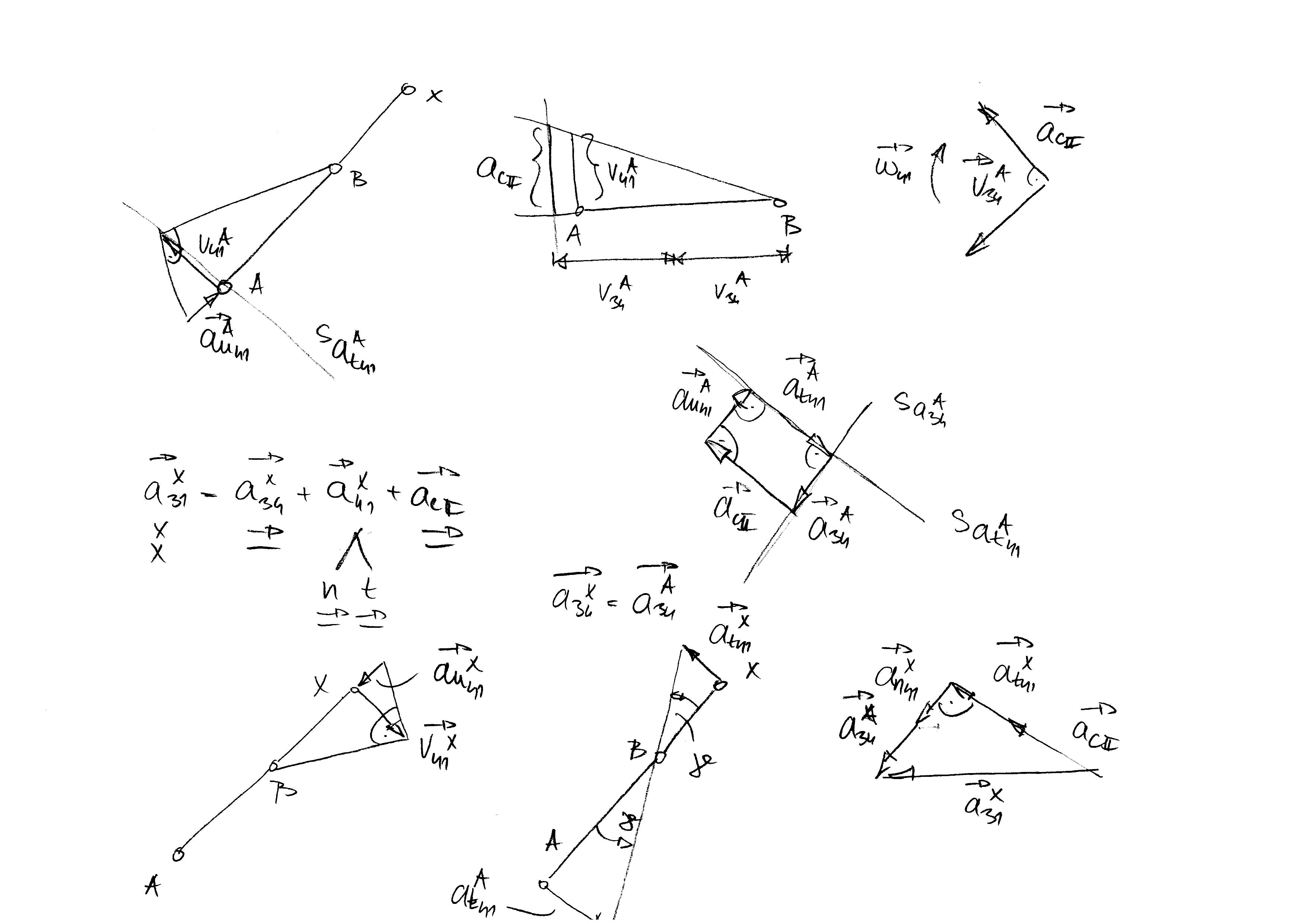
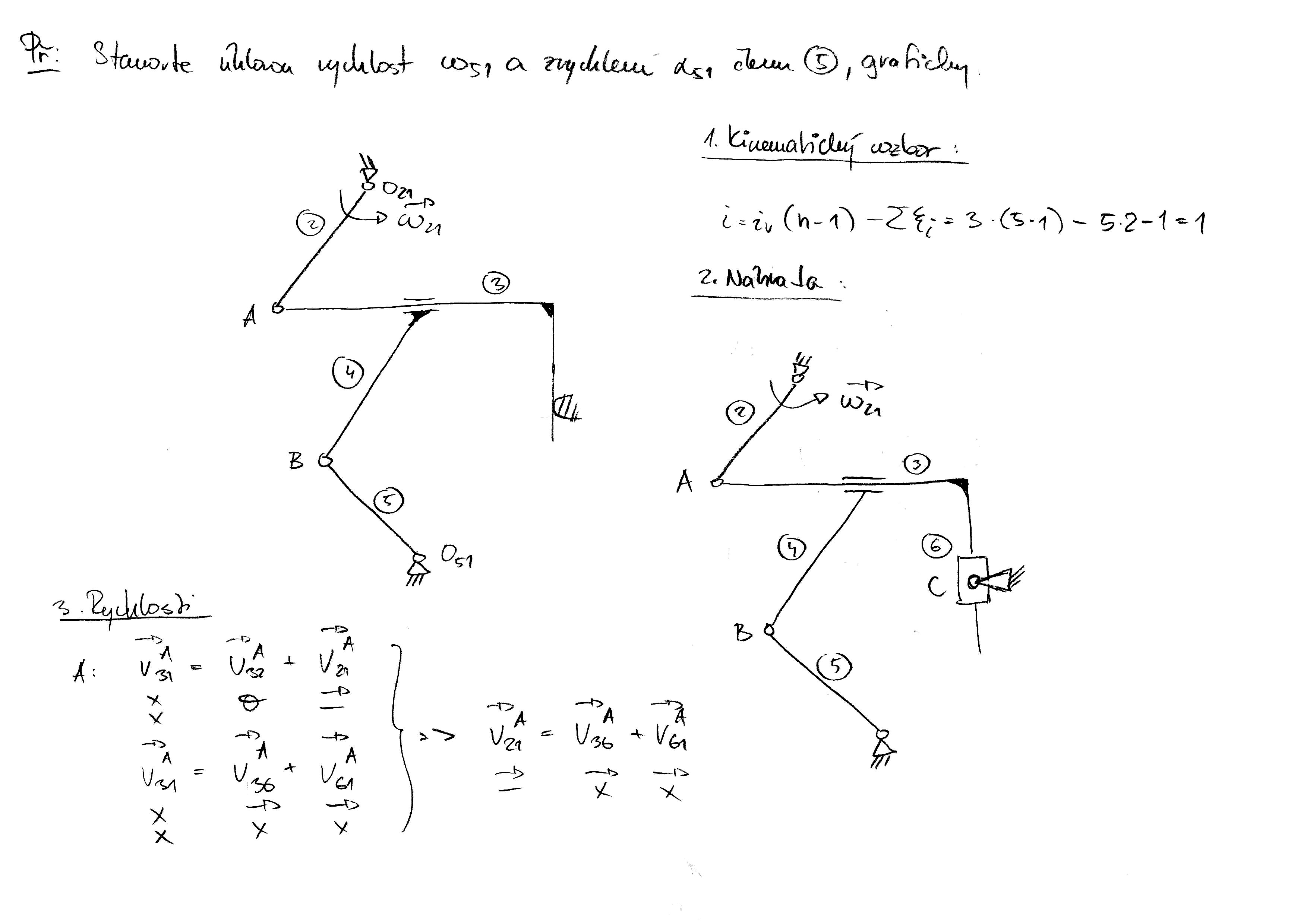
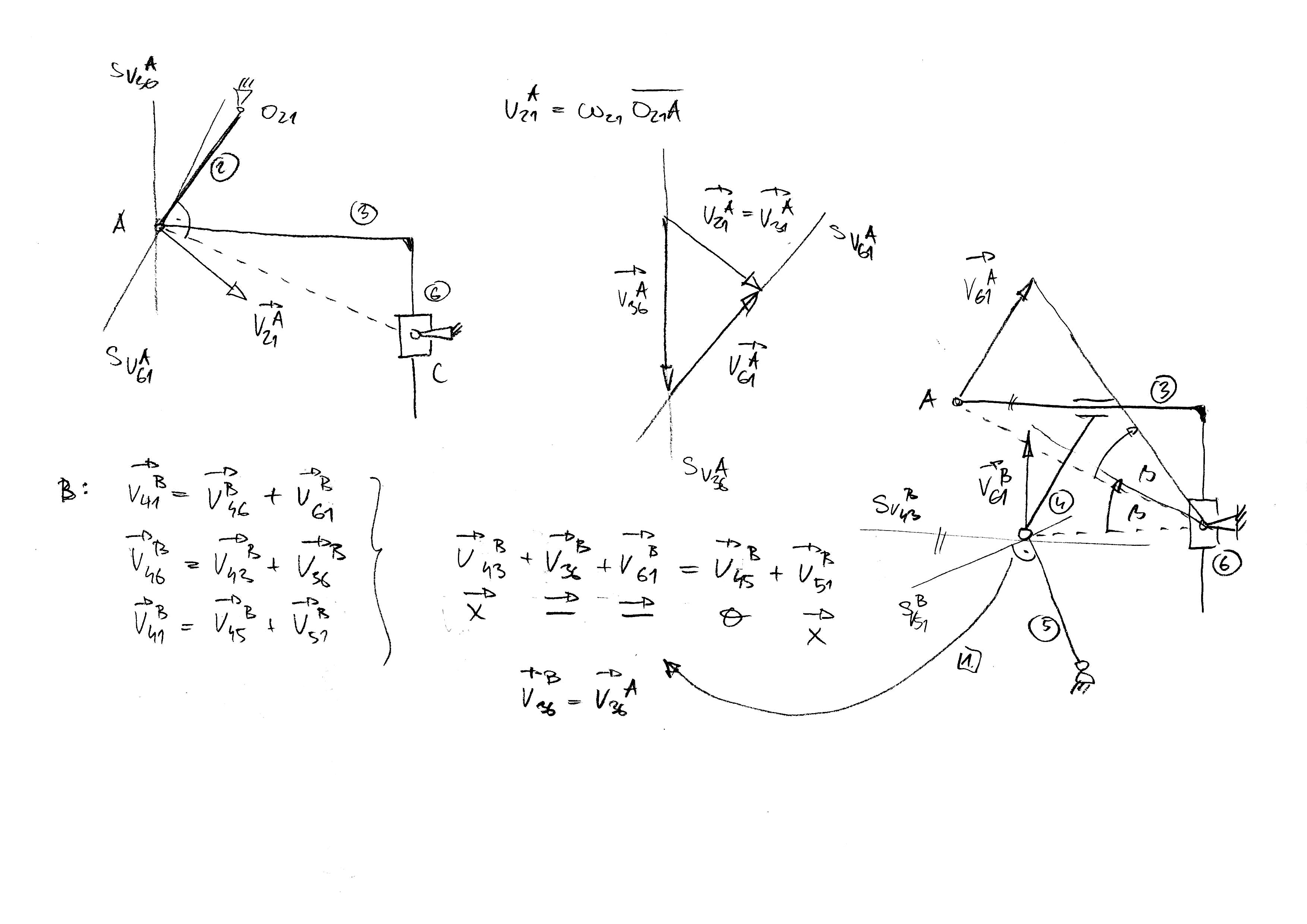
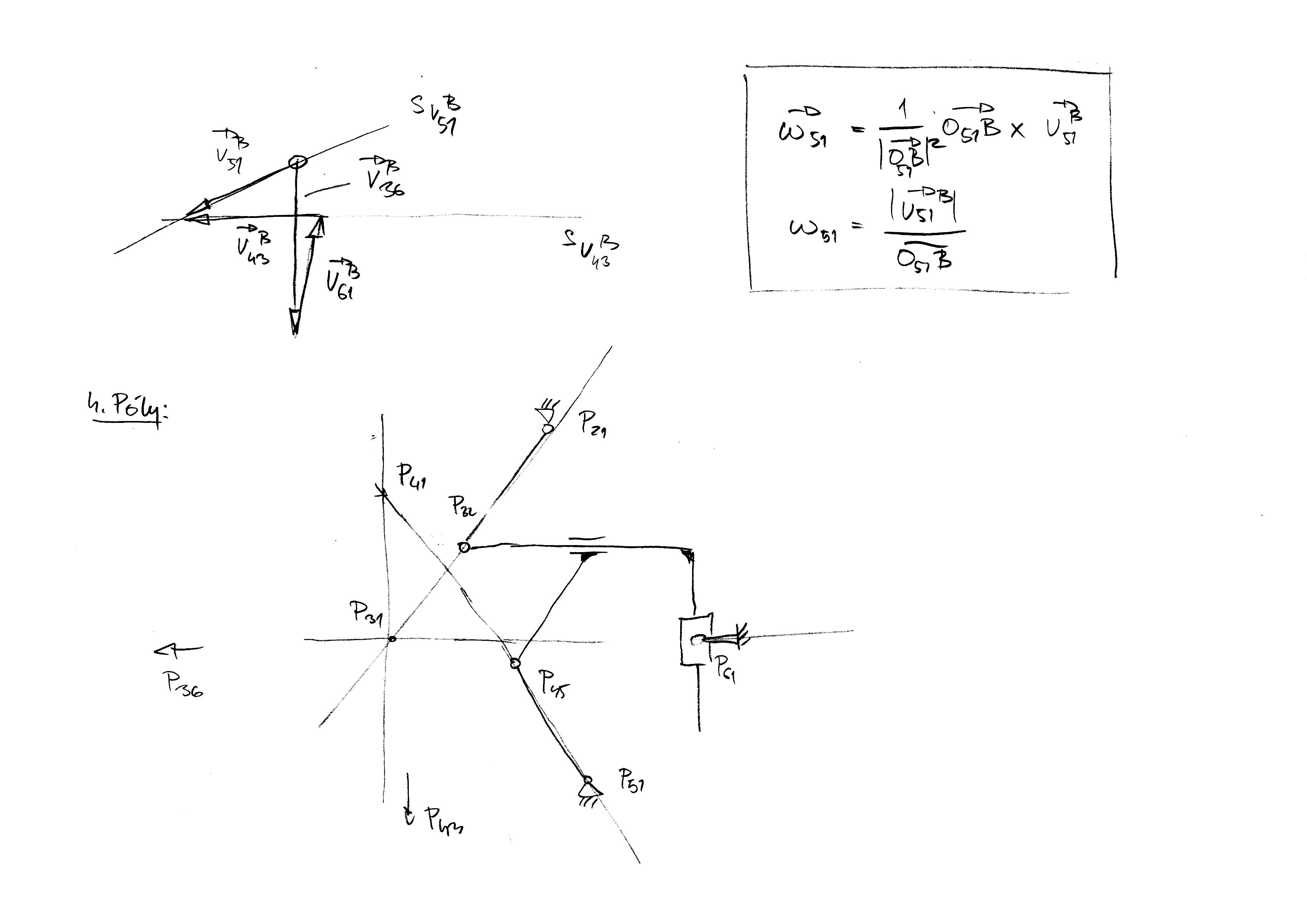
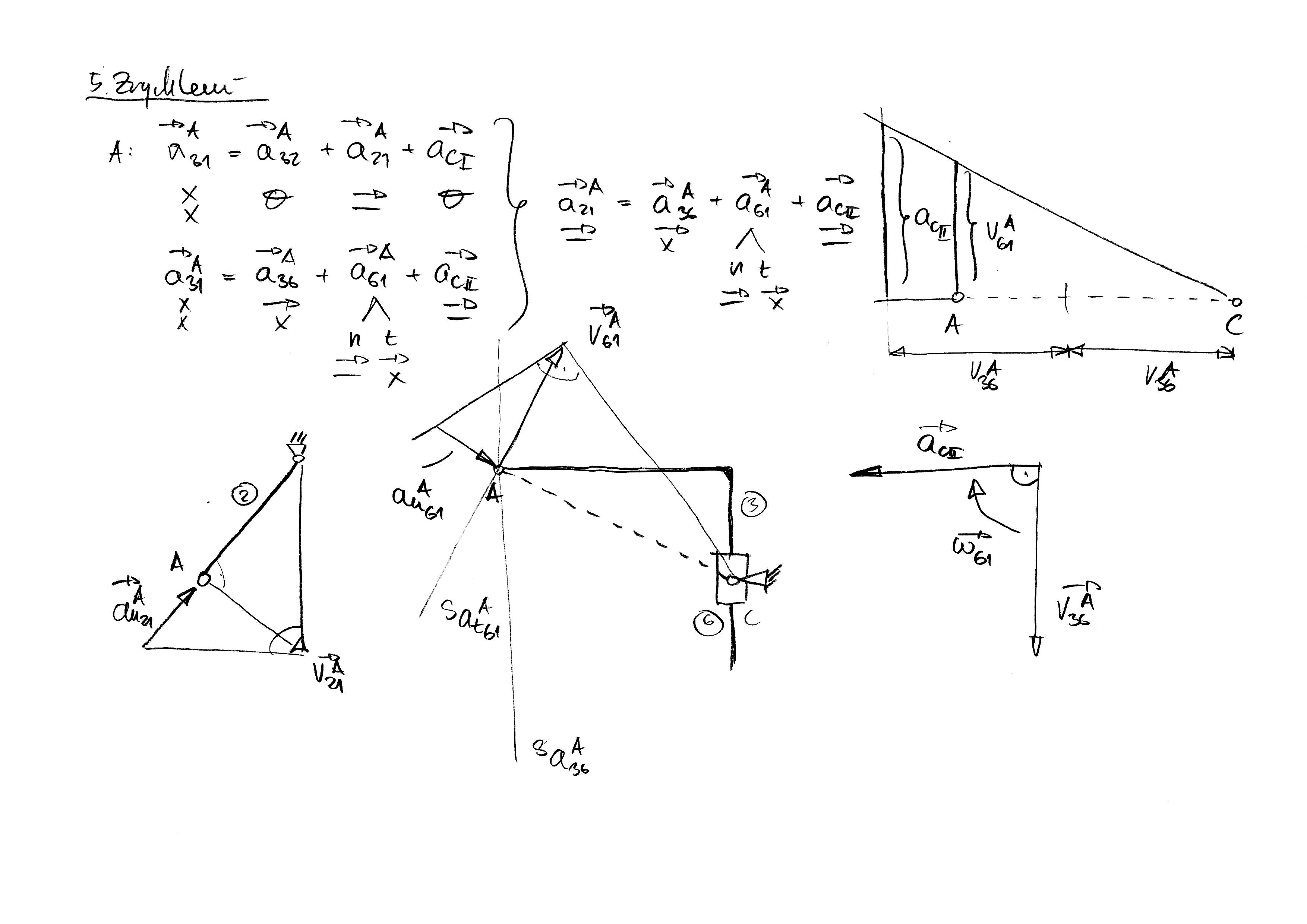
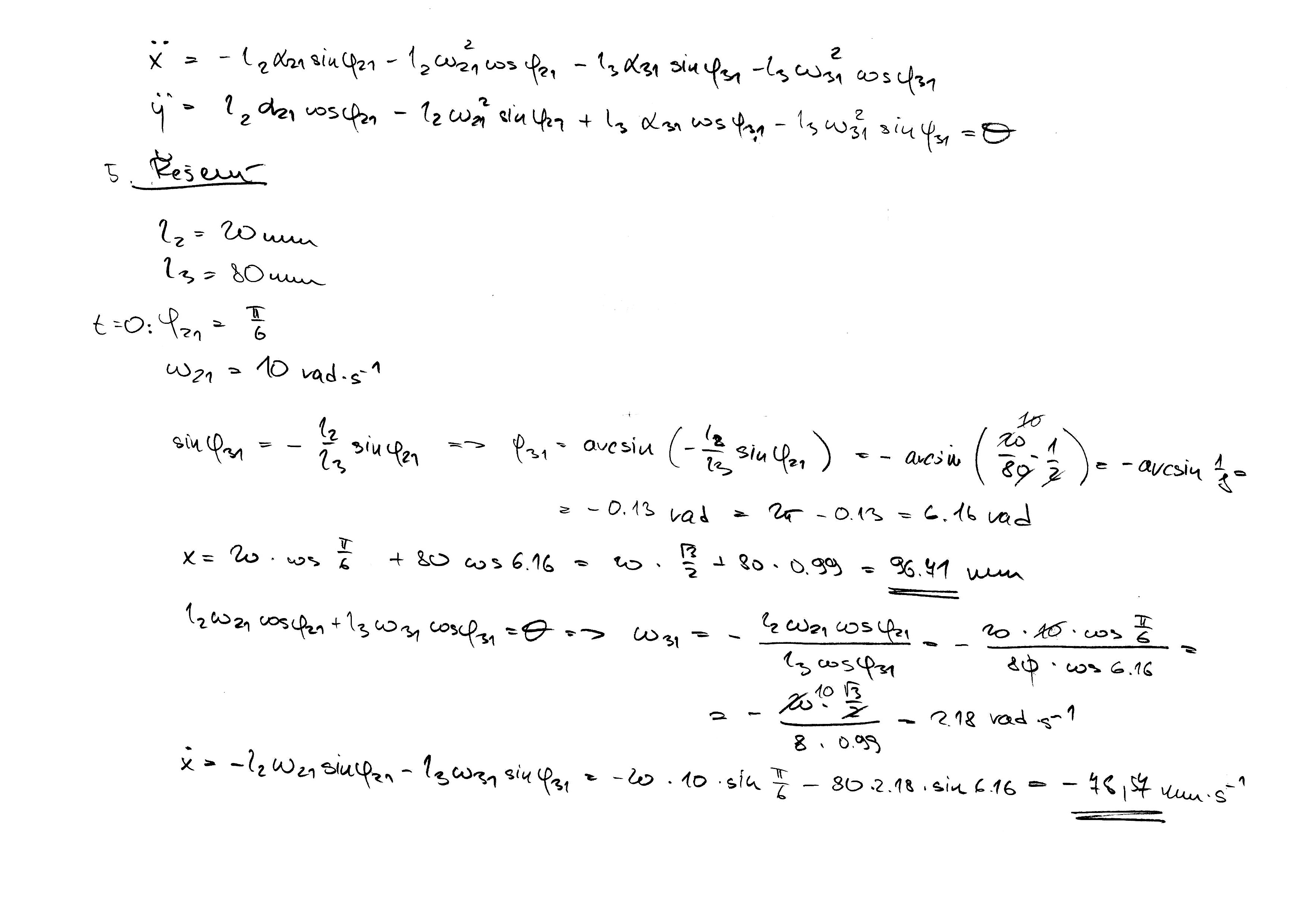
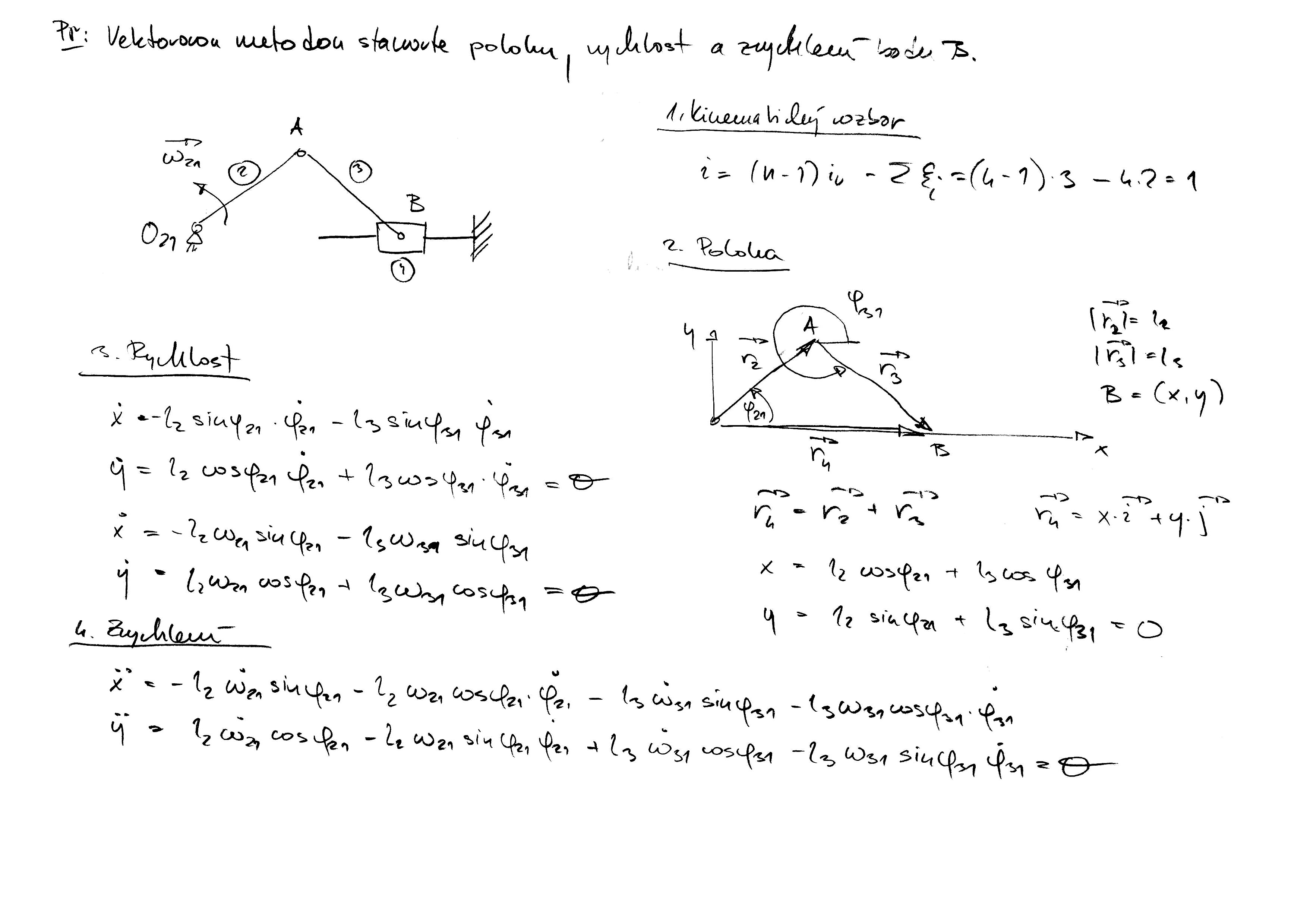
Cvičení 4: Obecný rovinný pohyb (ORP).
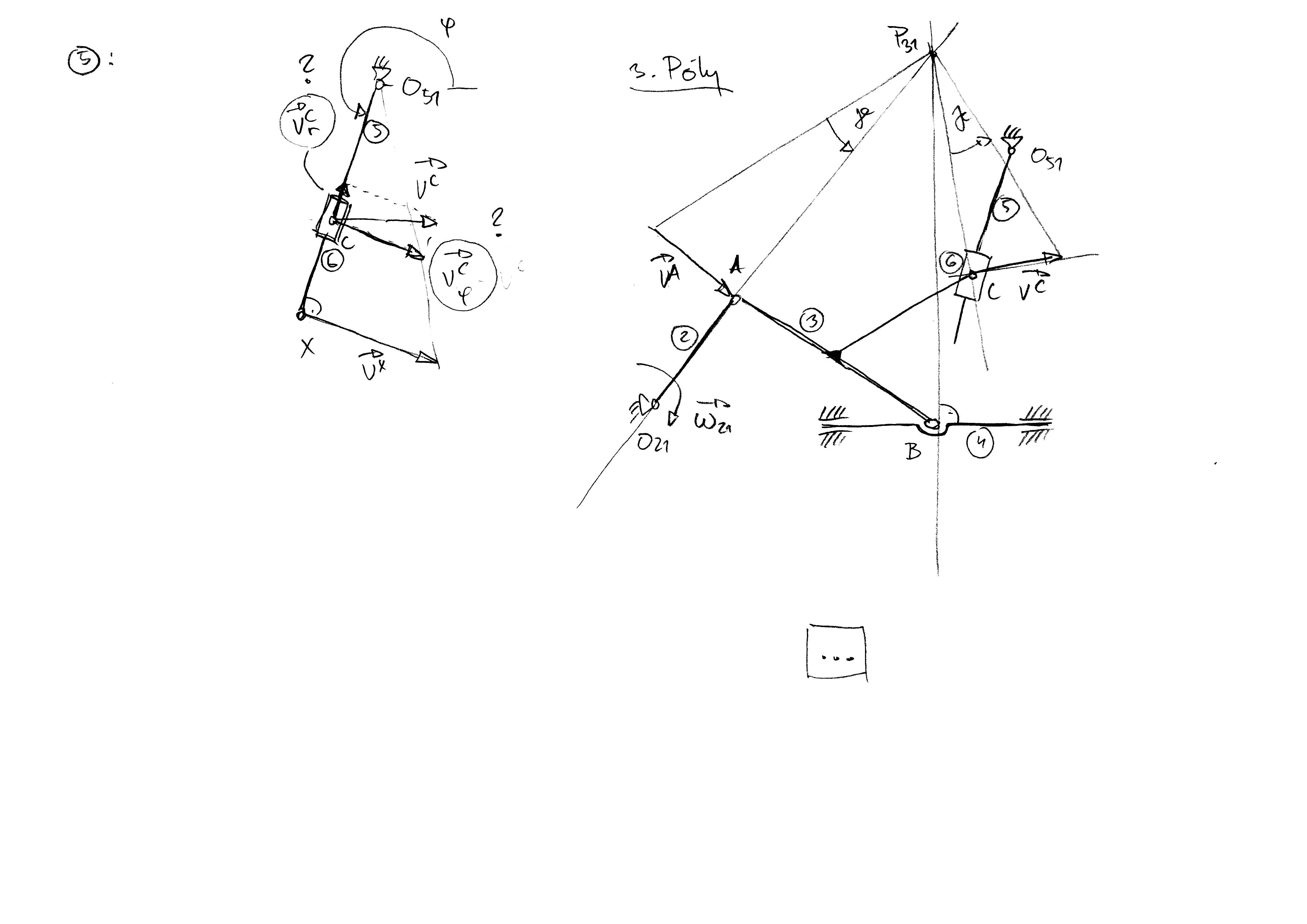
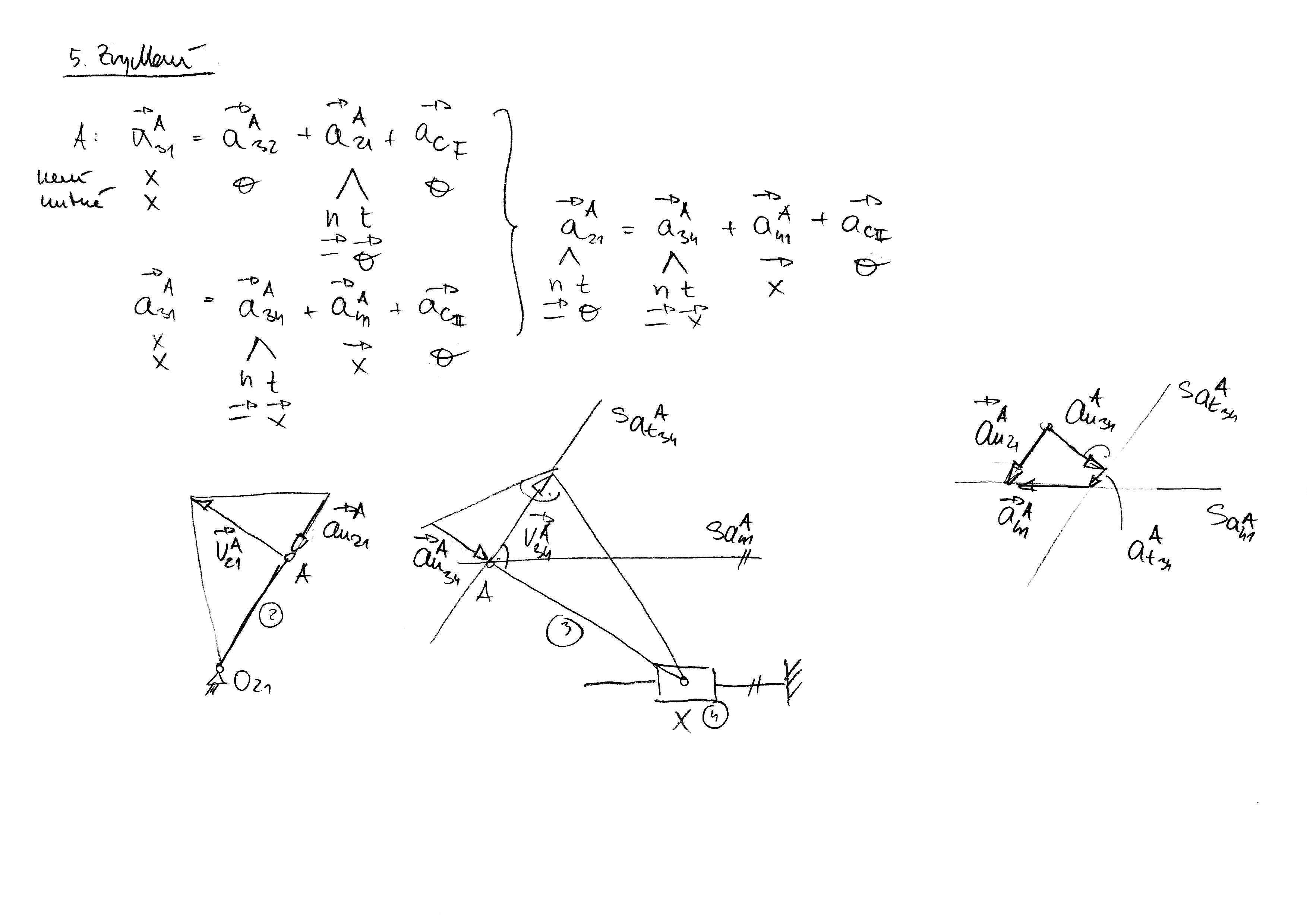
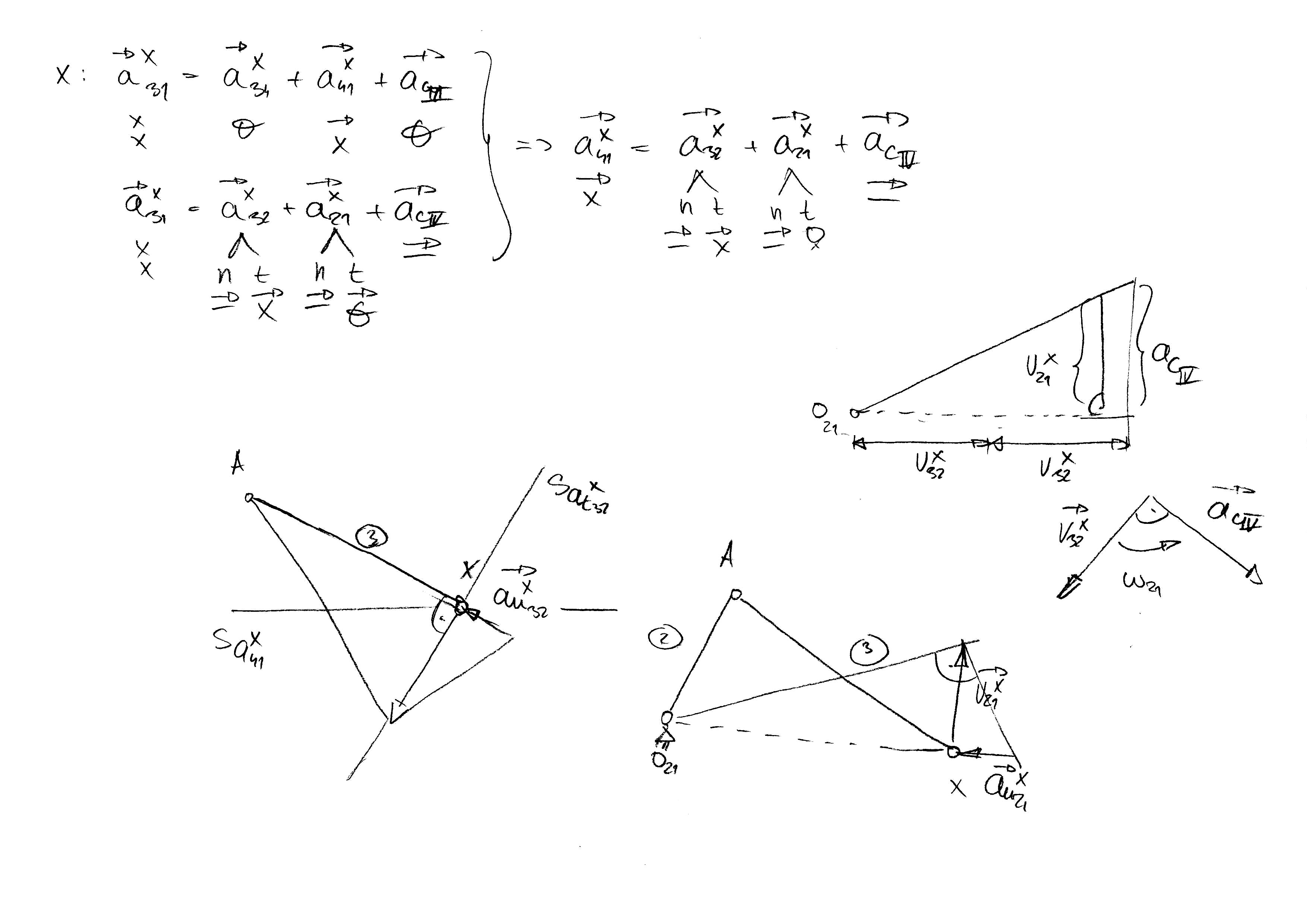
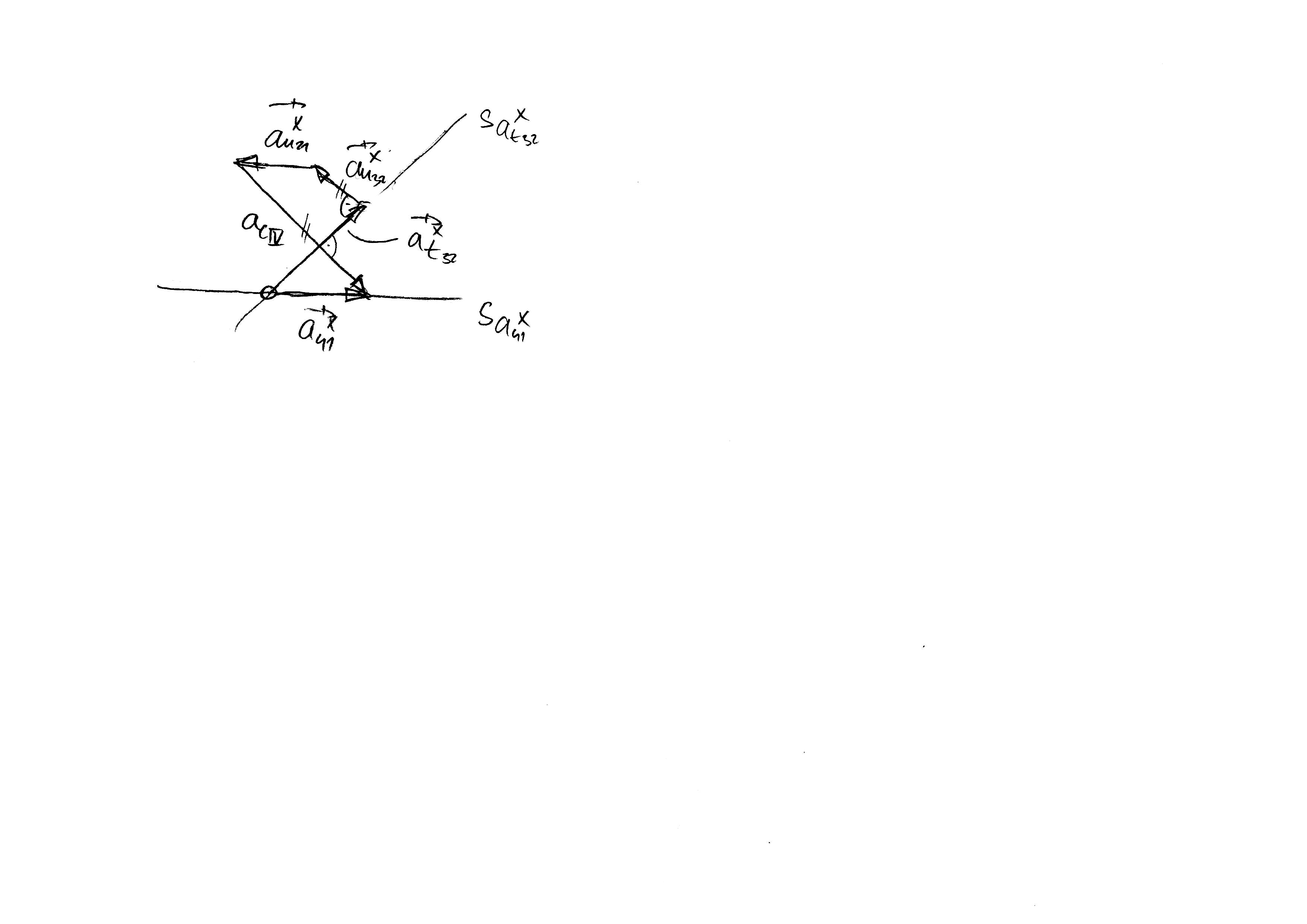
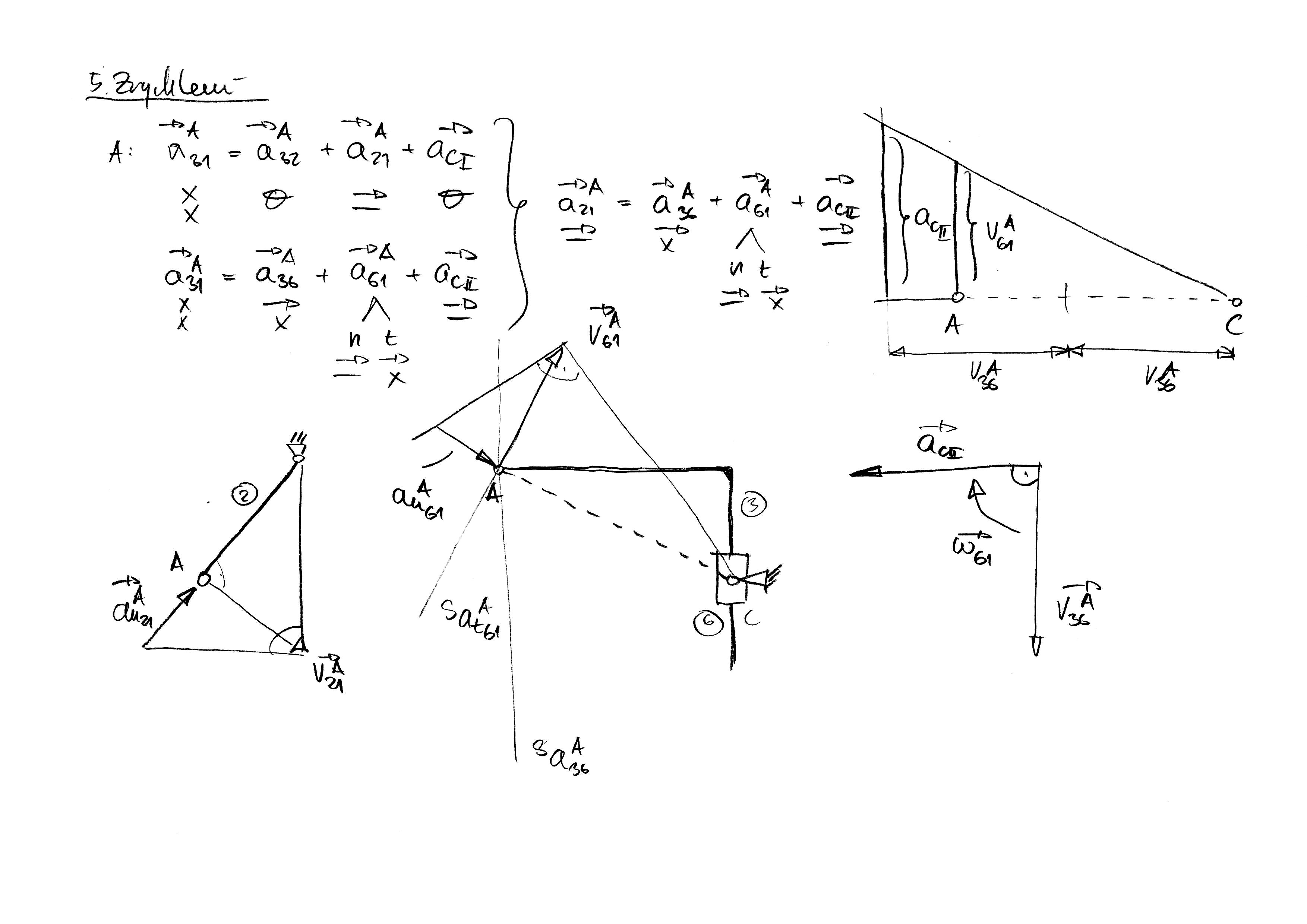
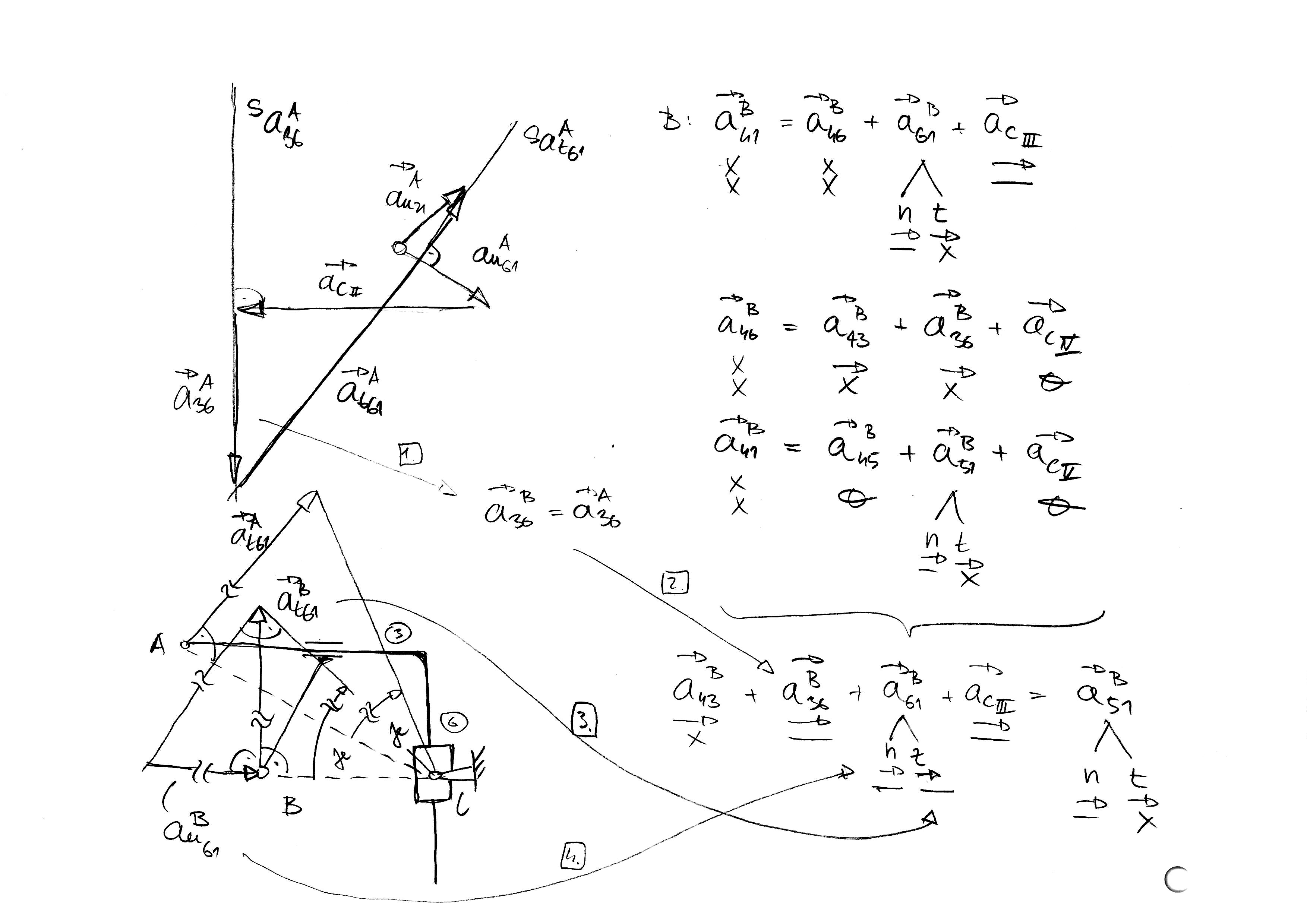
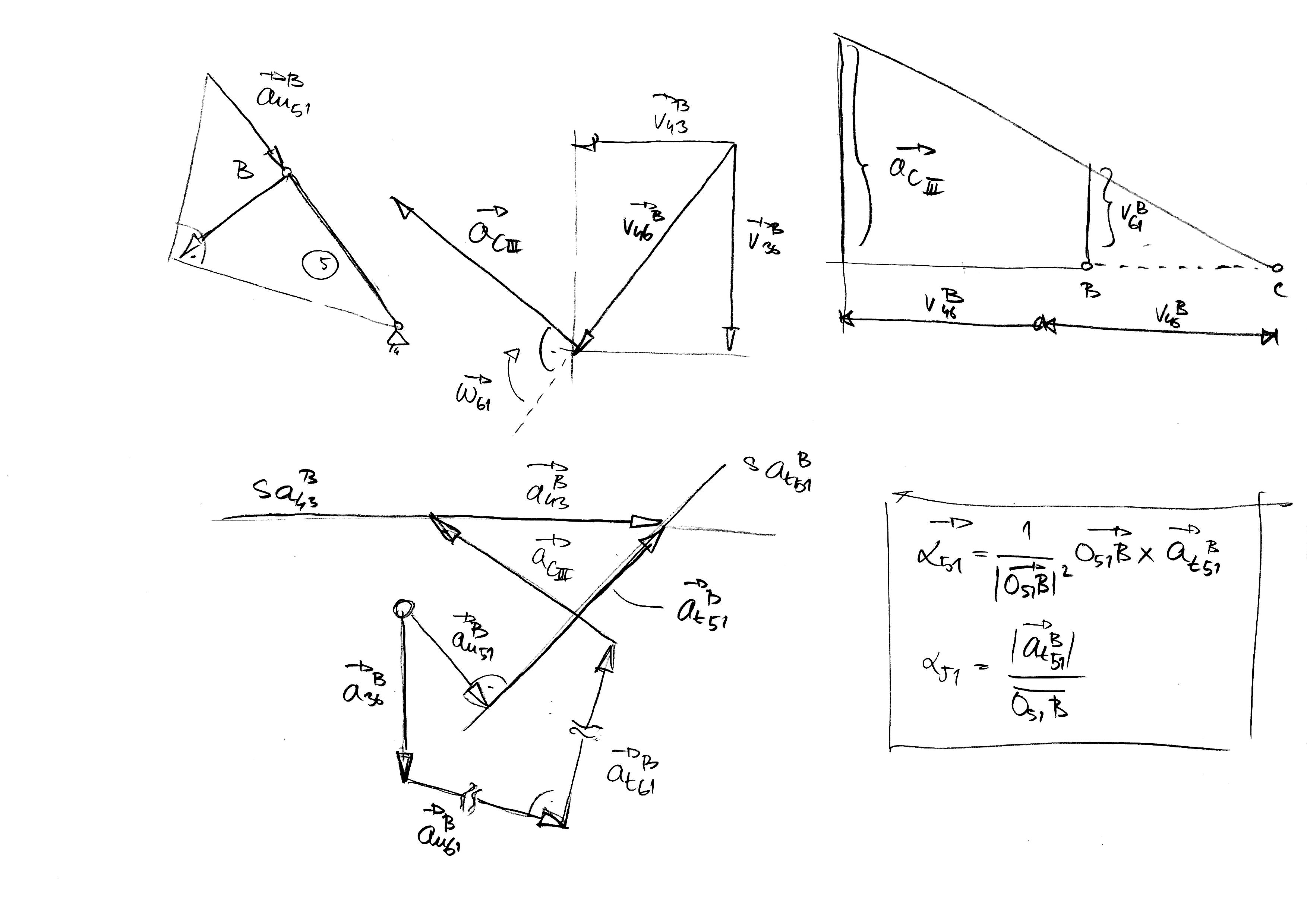
Cvičení 5: Obecný rovinný pohyb (ORP).
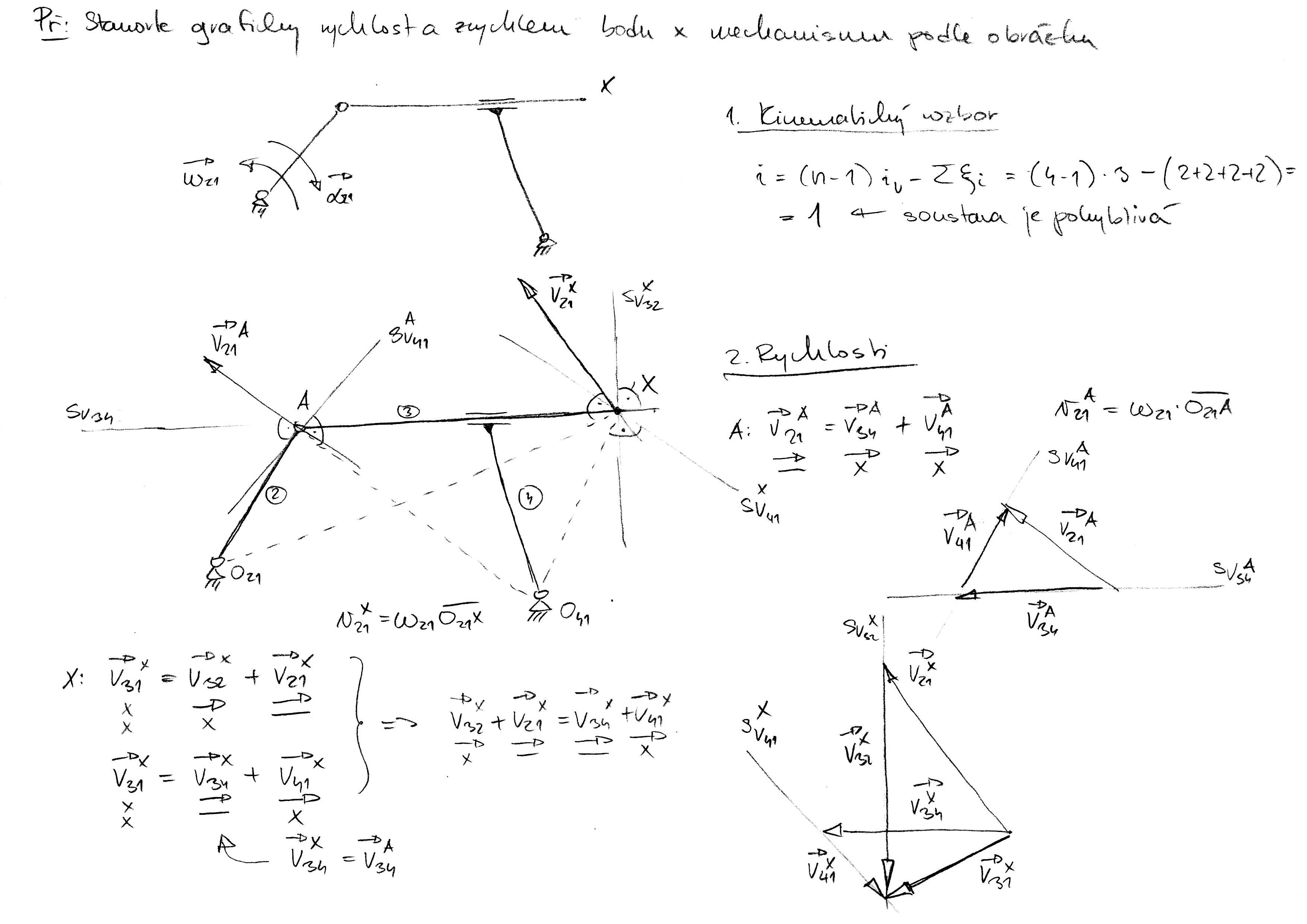
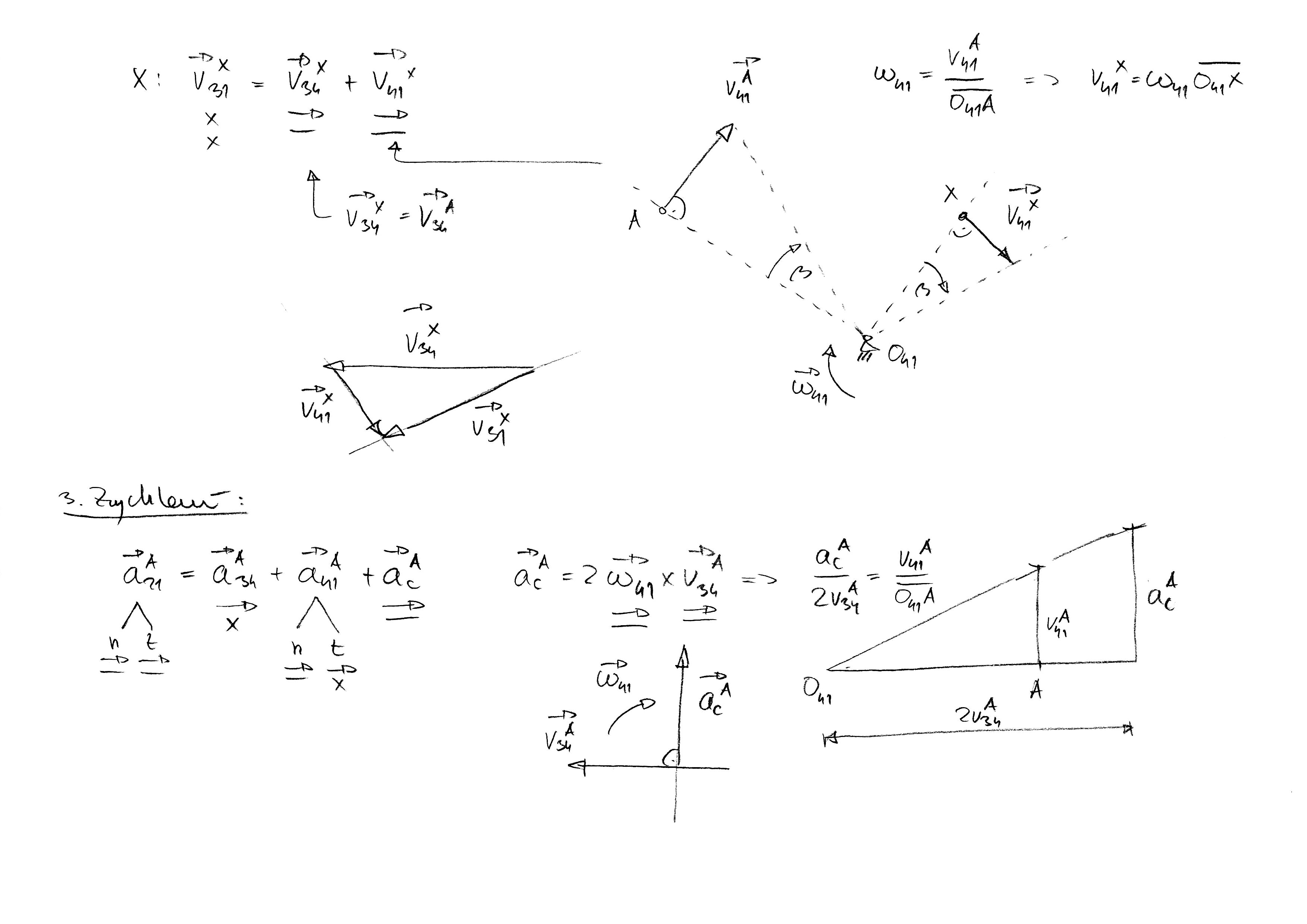
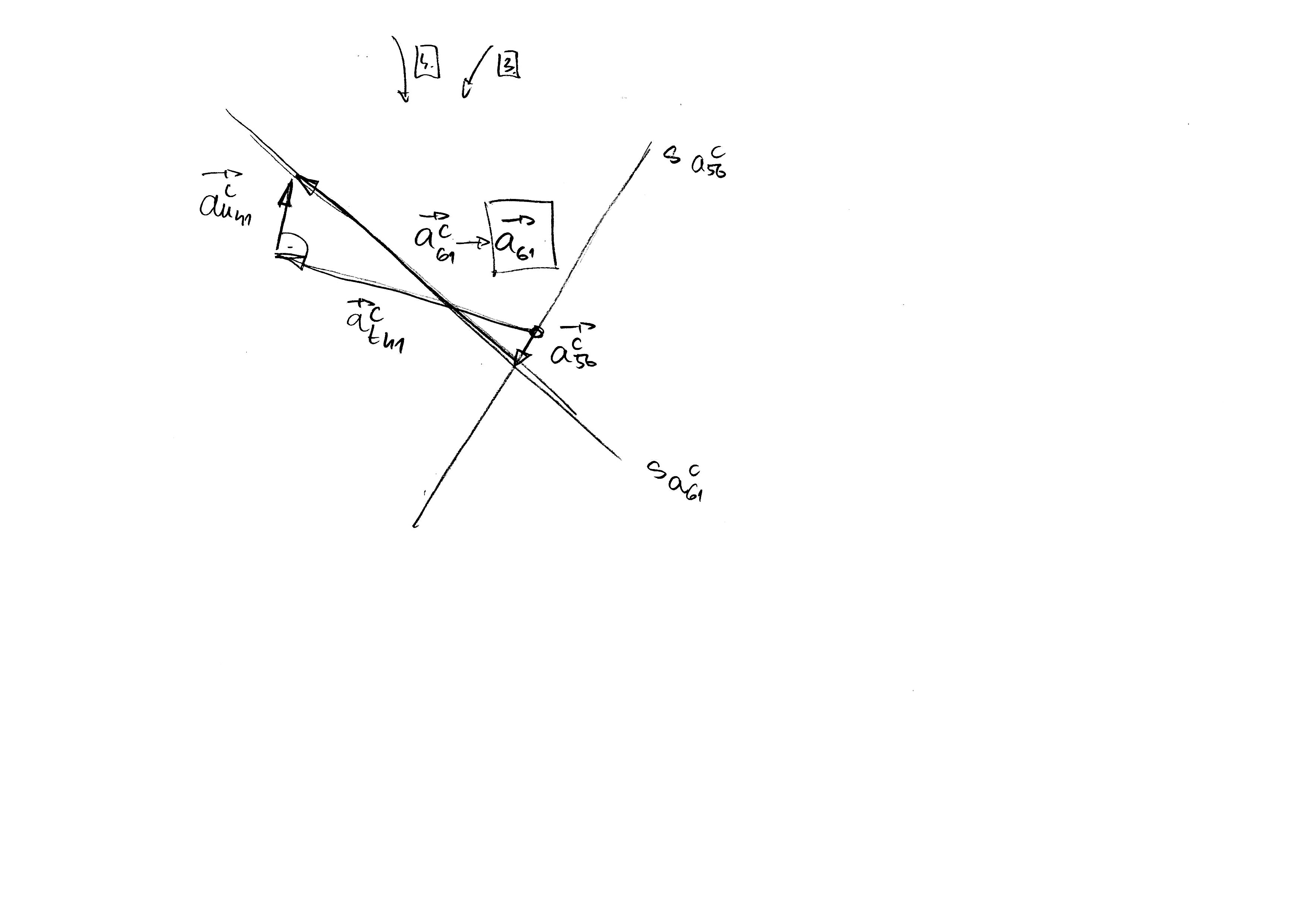
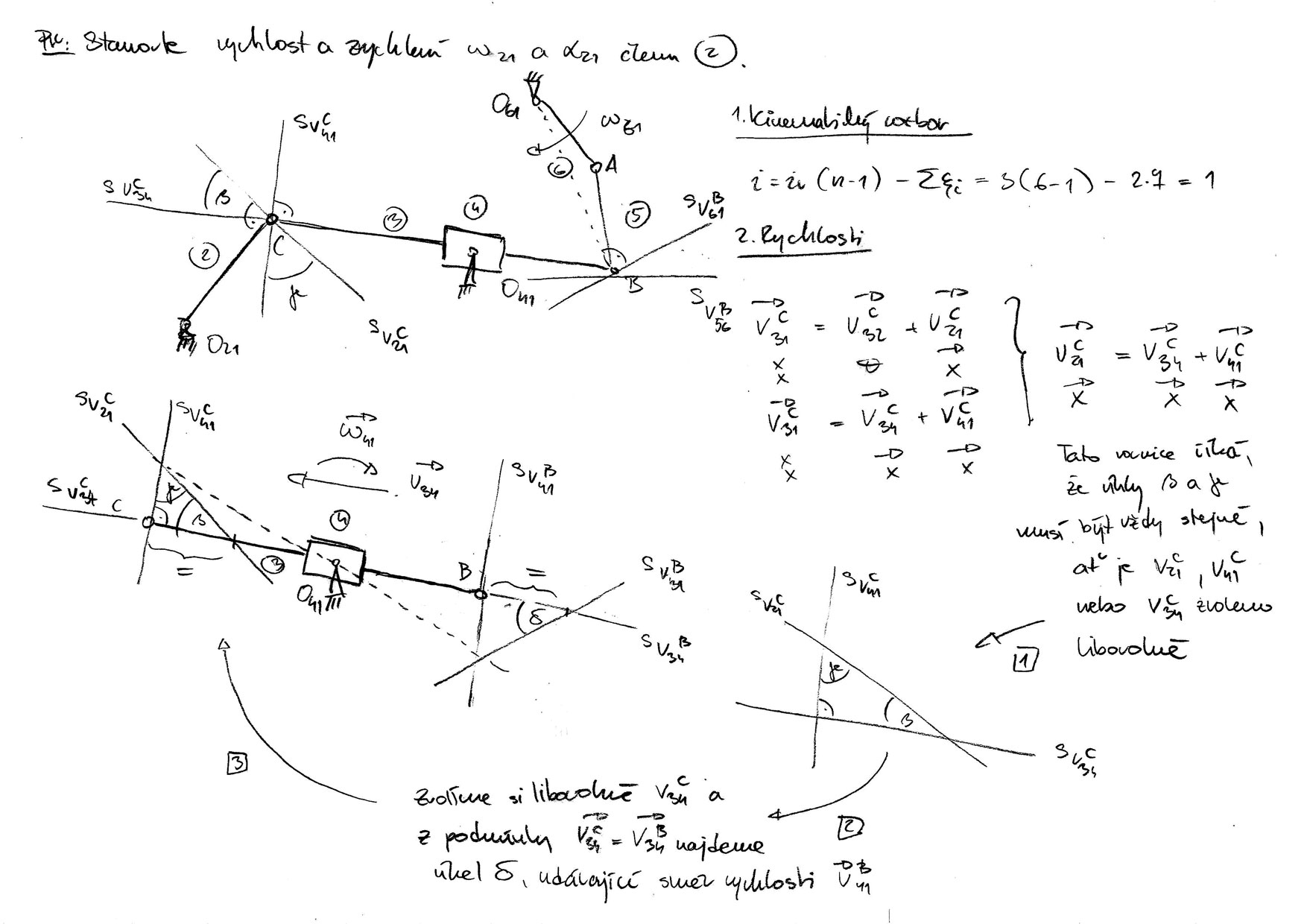
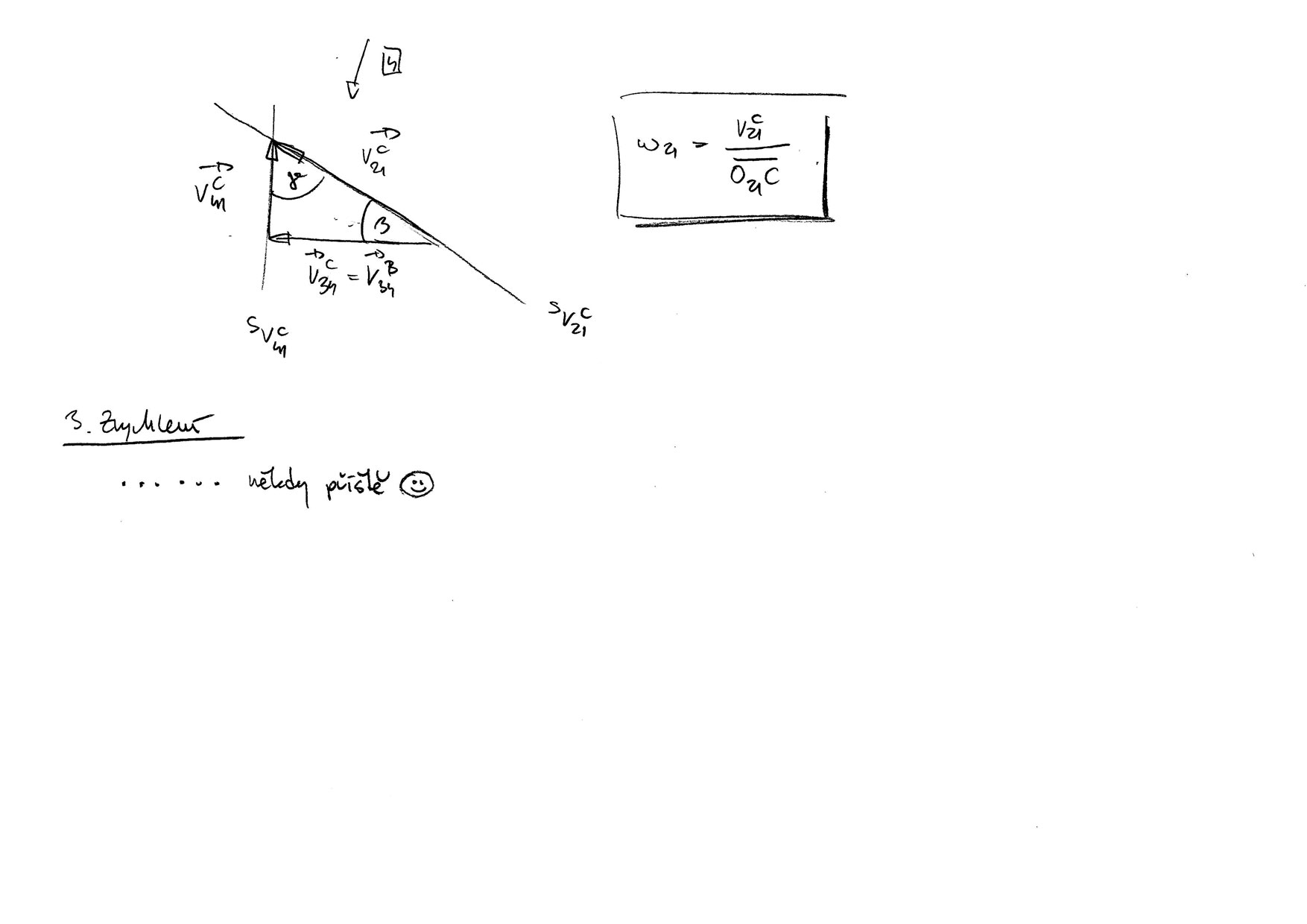
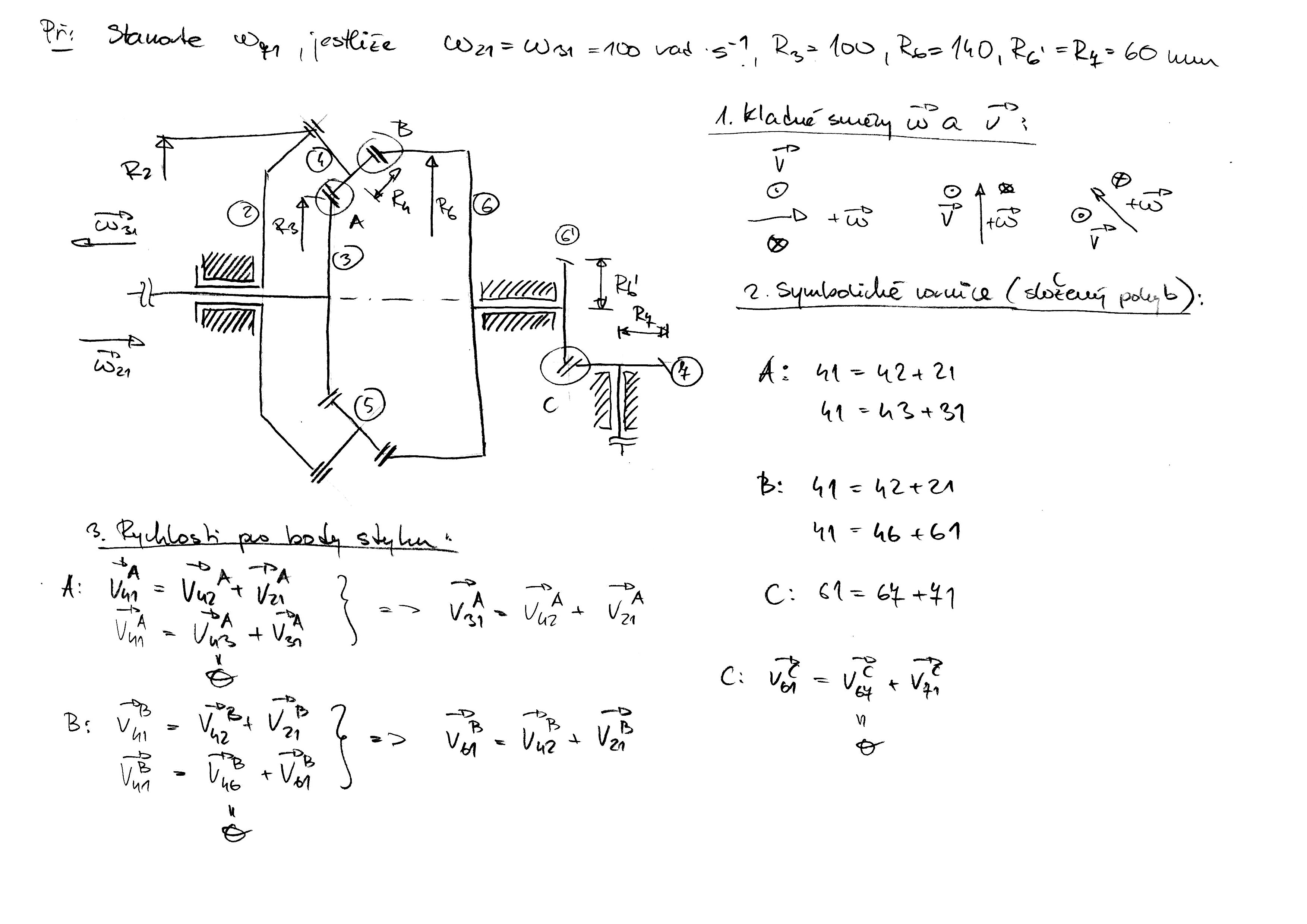
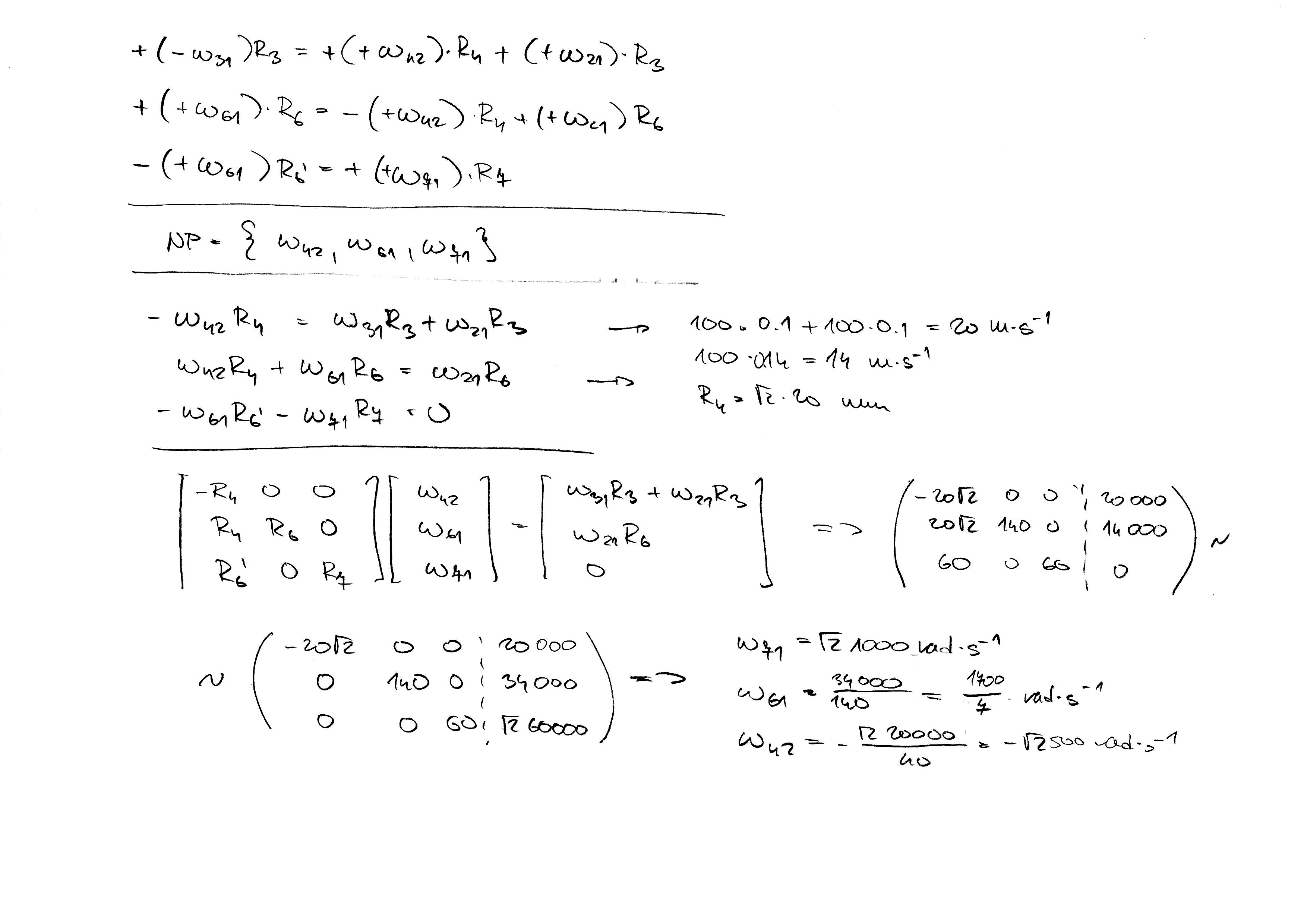
Cvičení 6: Obecný rovinný pohyb (ORP)/Složený pohyb.
Cvičení 7: Složený pohyb.
Cvičení 8: Složený pohyb.
Cvičení 9: Mechanismy s vačkami.
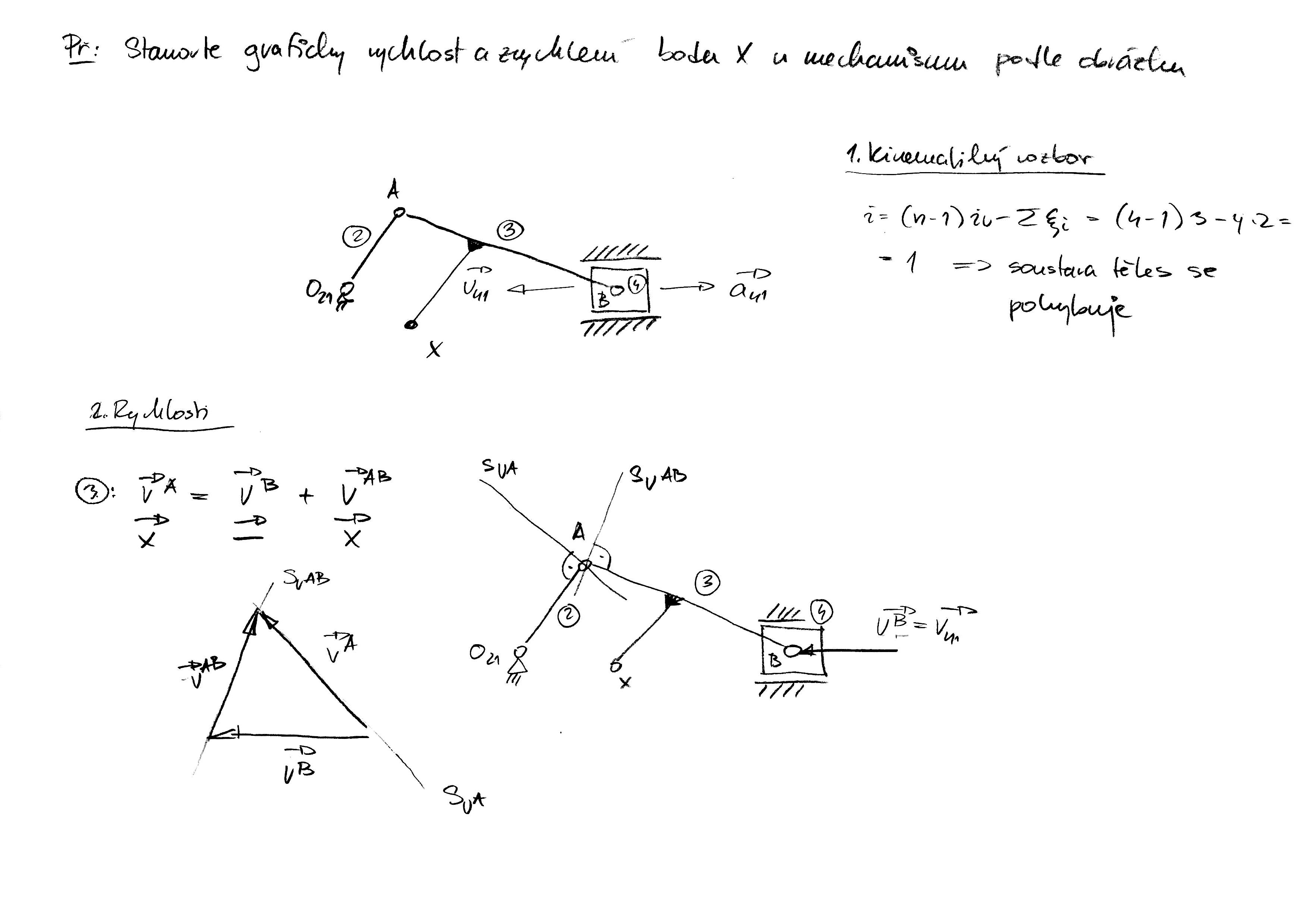
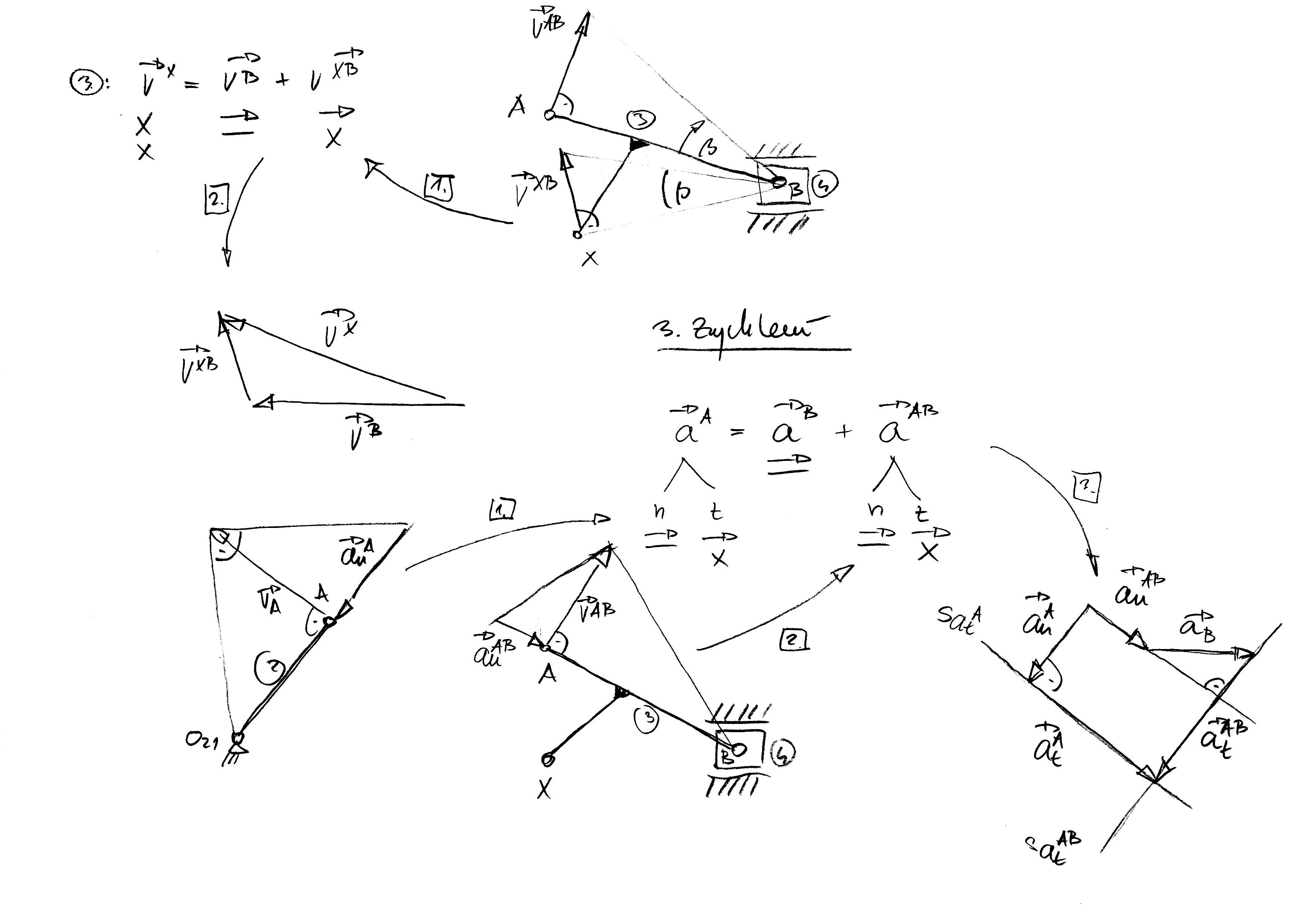
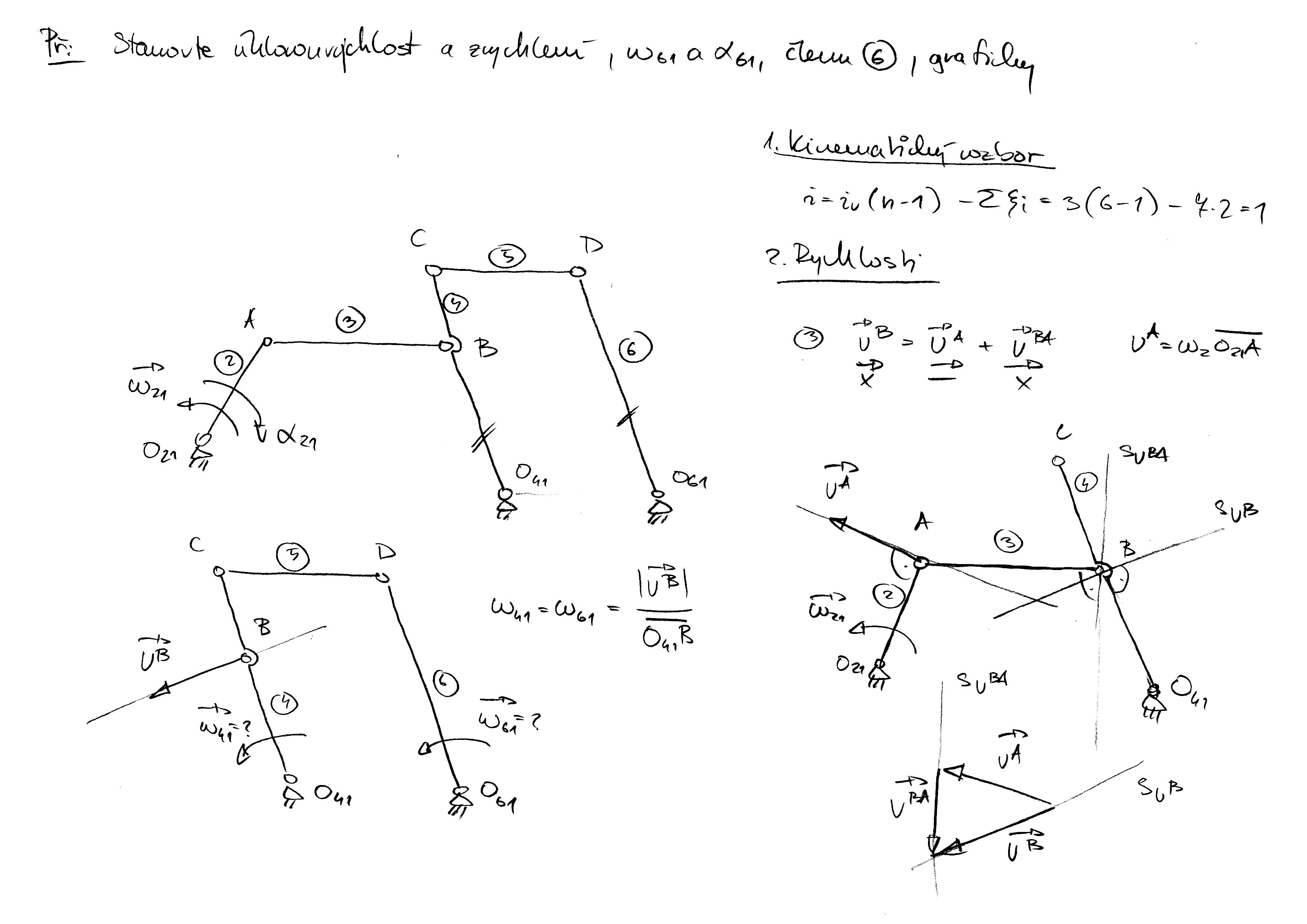
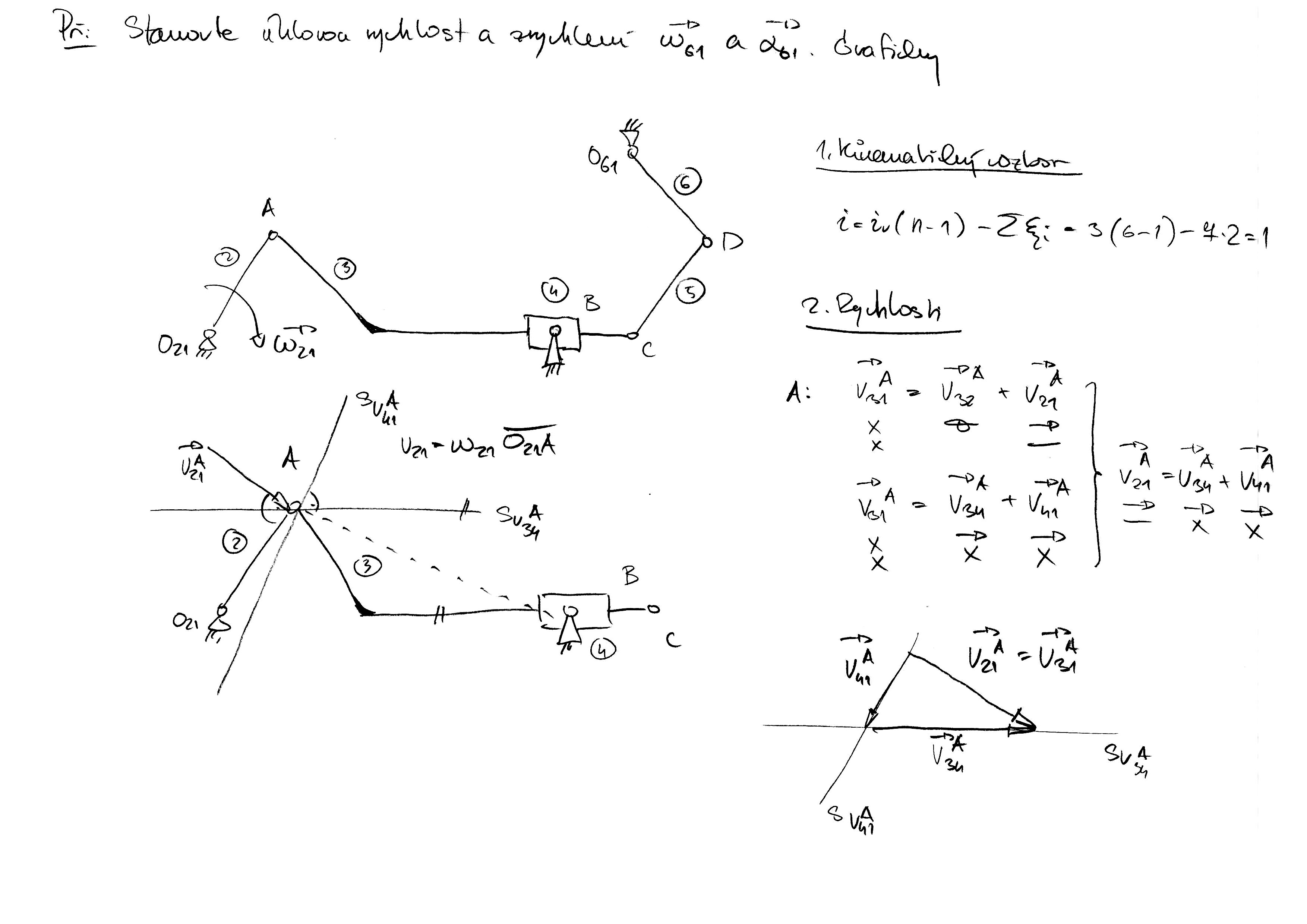
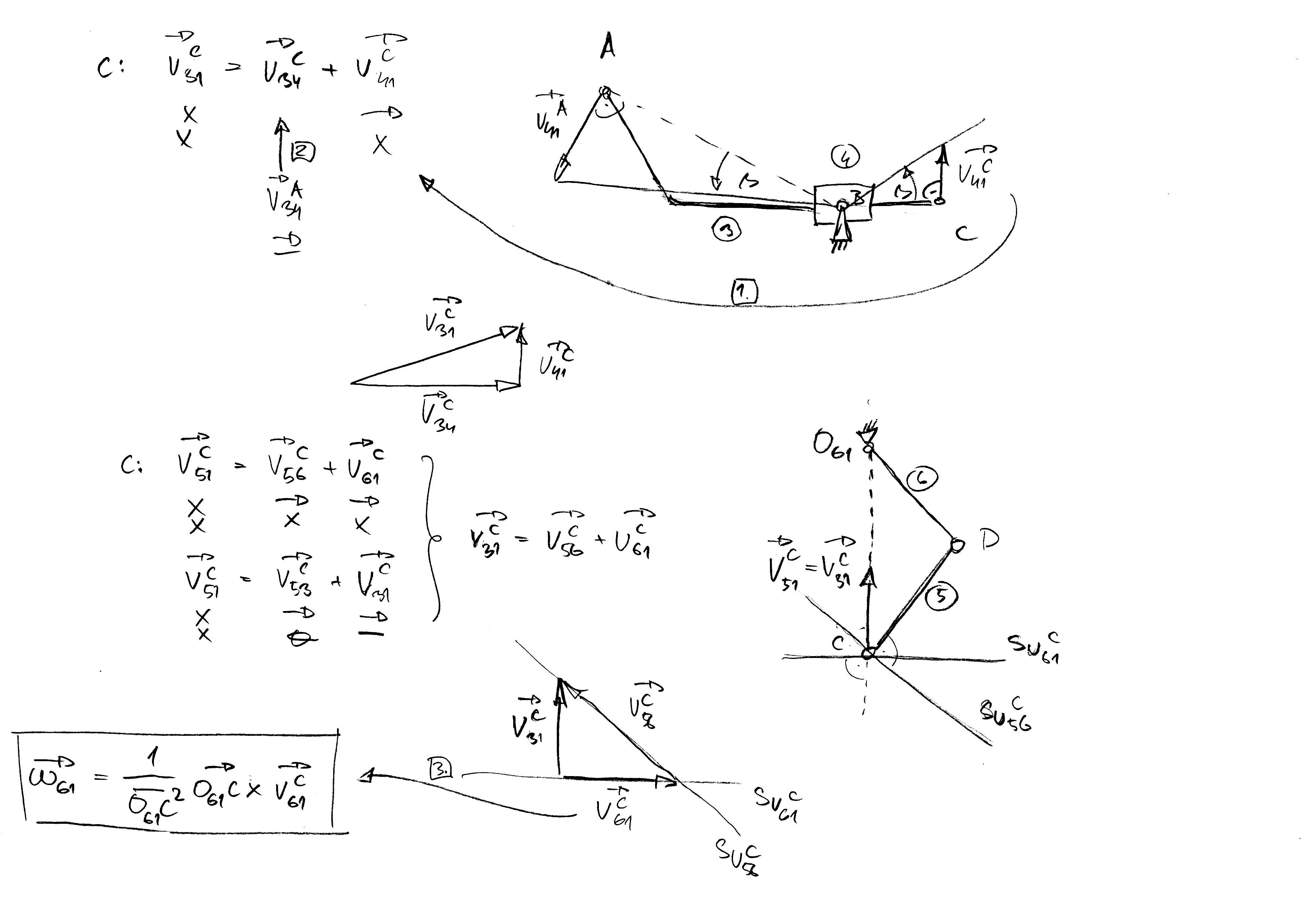
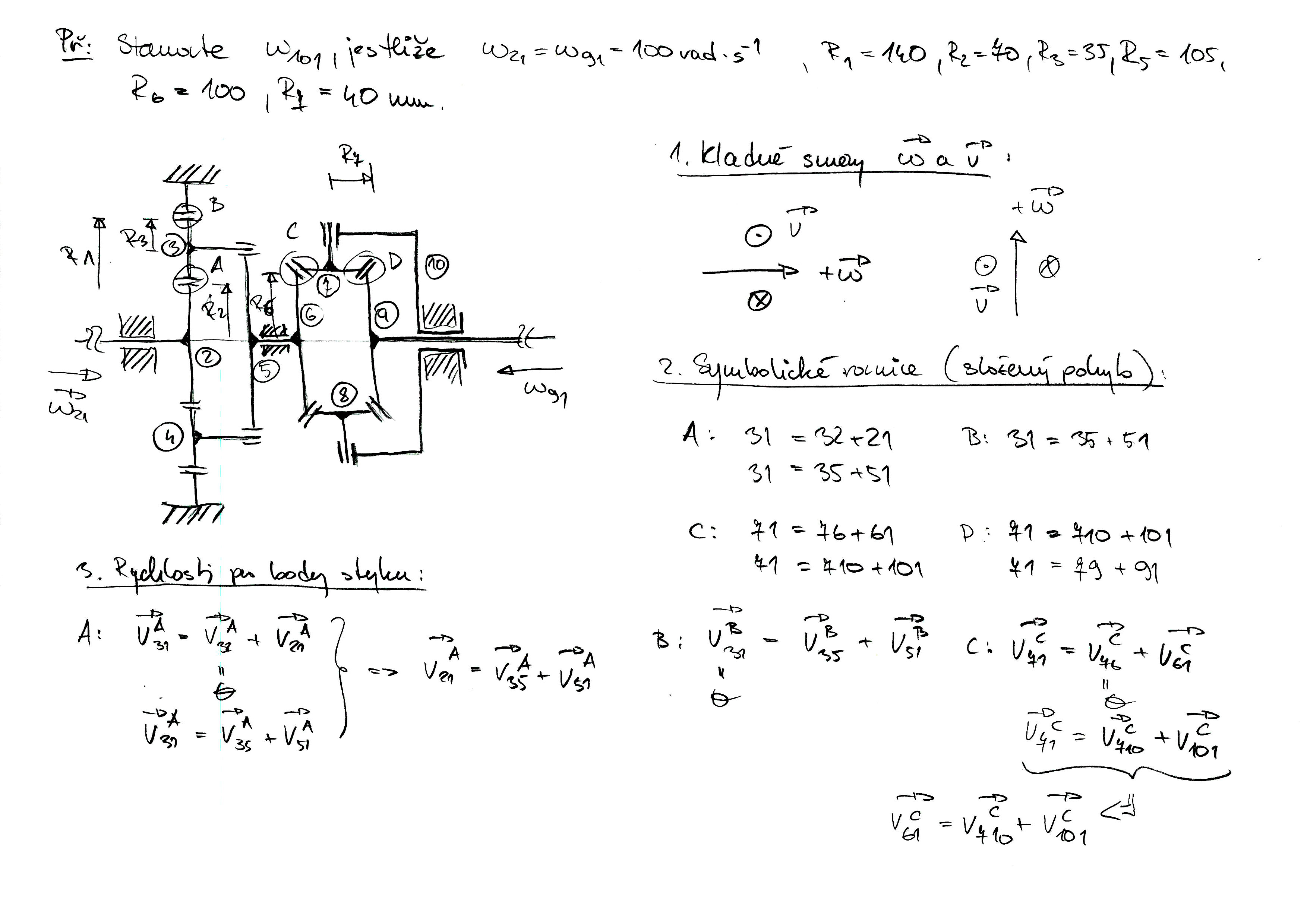
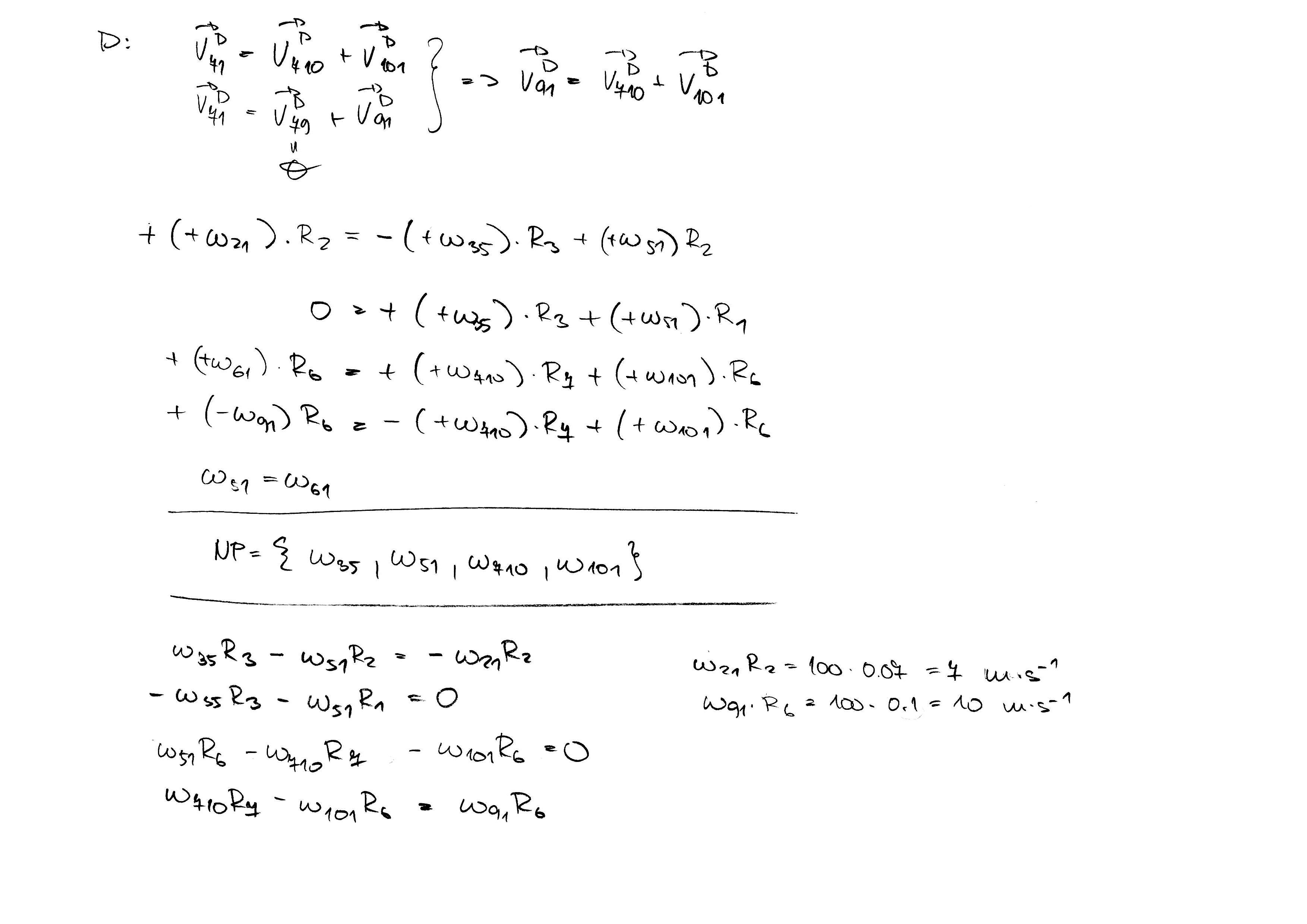
Cvičení 10: Mechanismy.
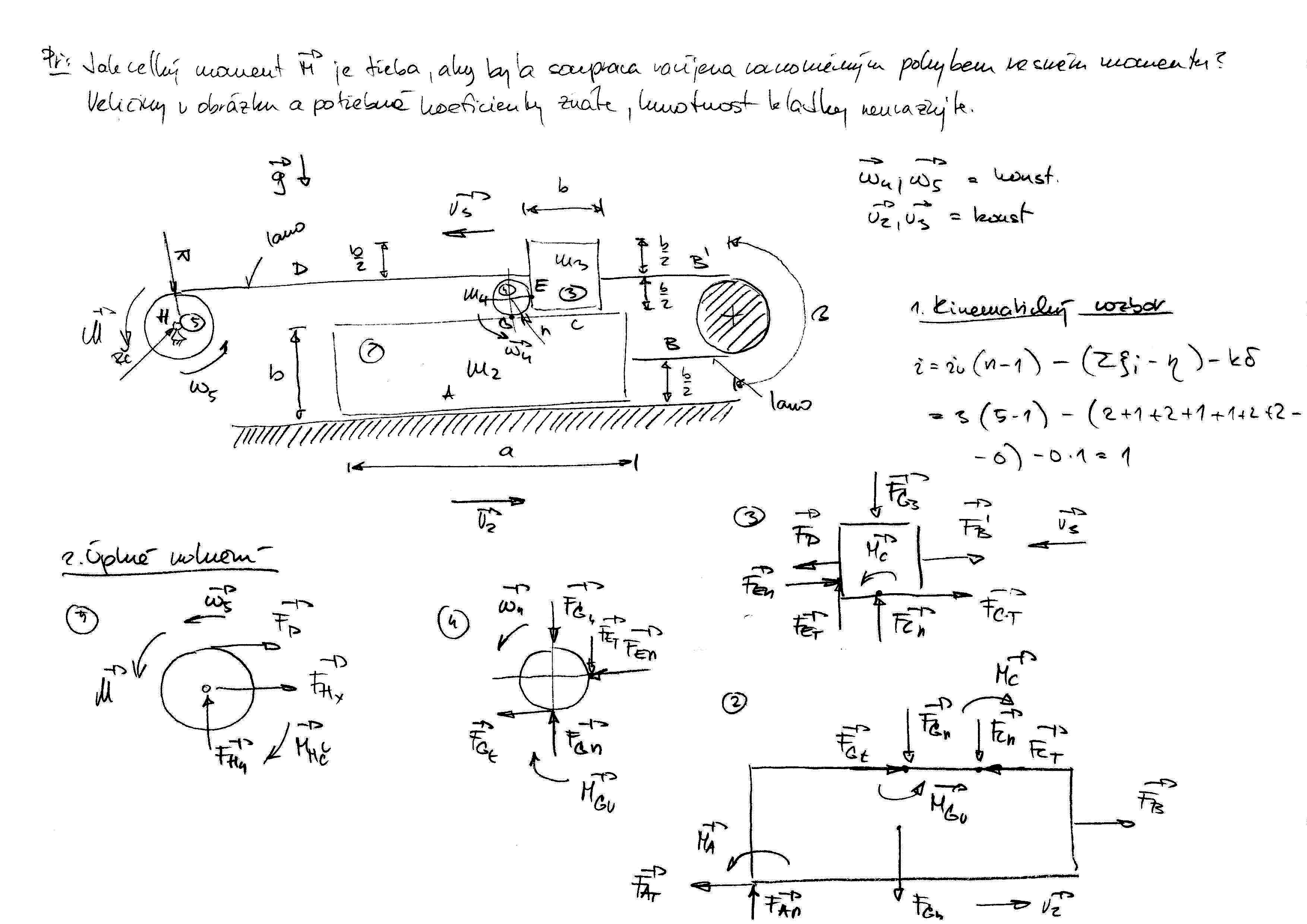
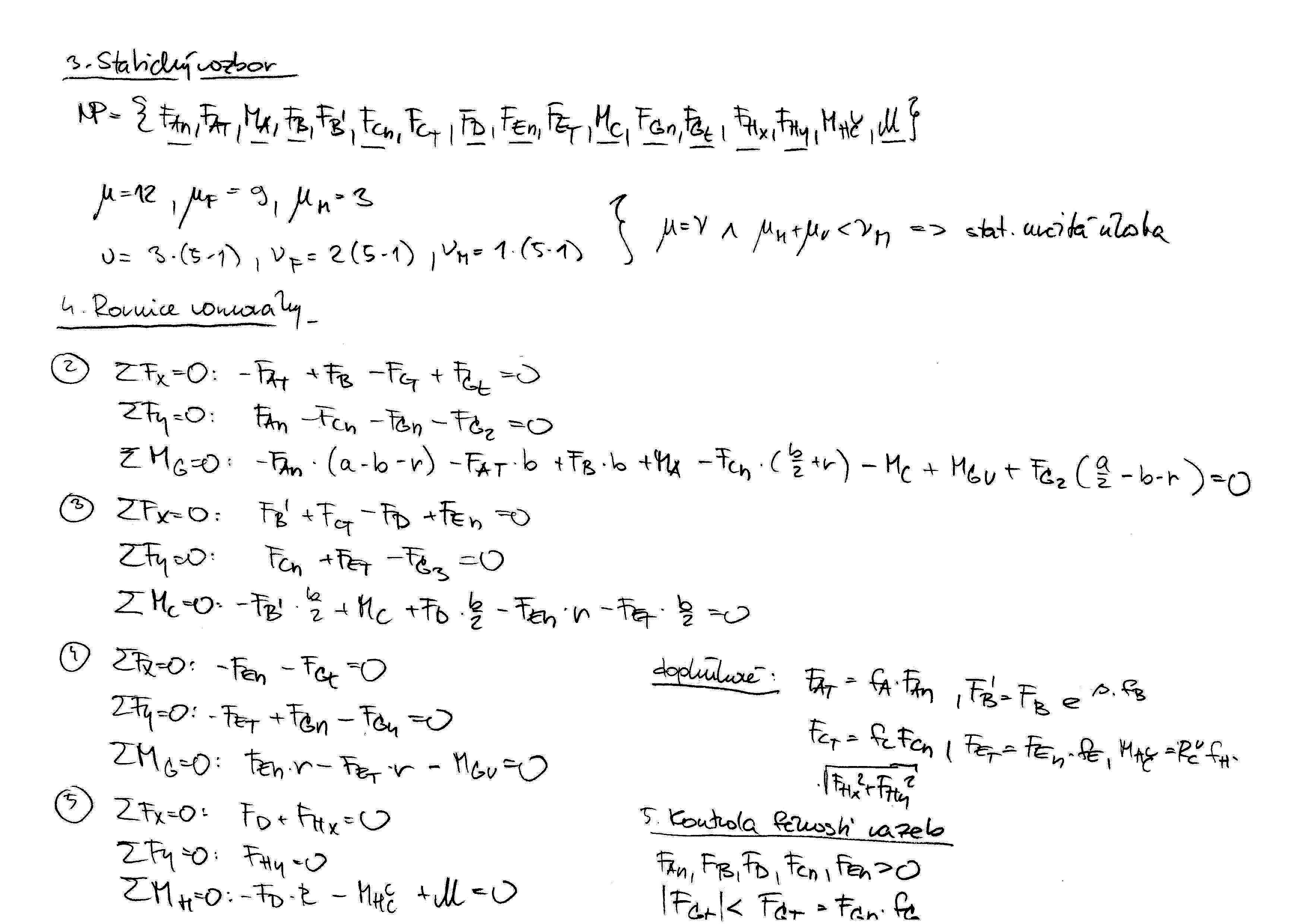
Cvičení 11: Mechanismy.
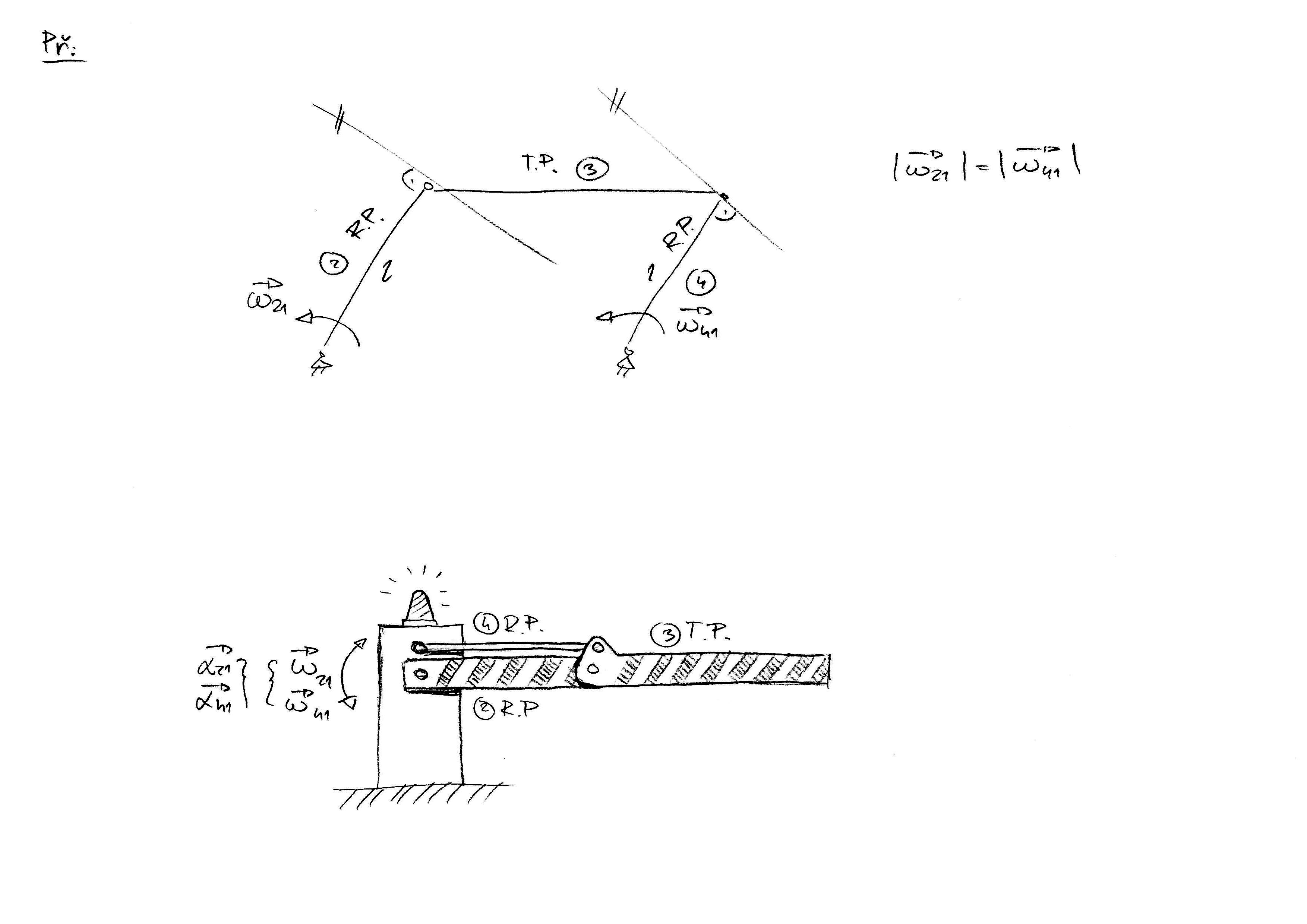
Cvičení 12: Současné rotace, planetové mechanismy.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Statika¶
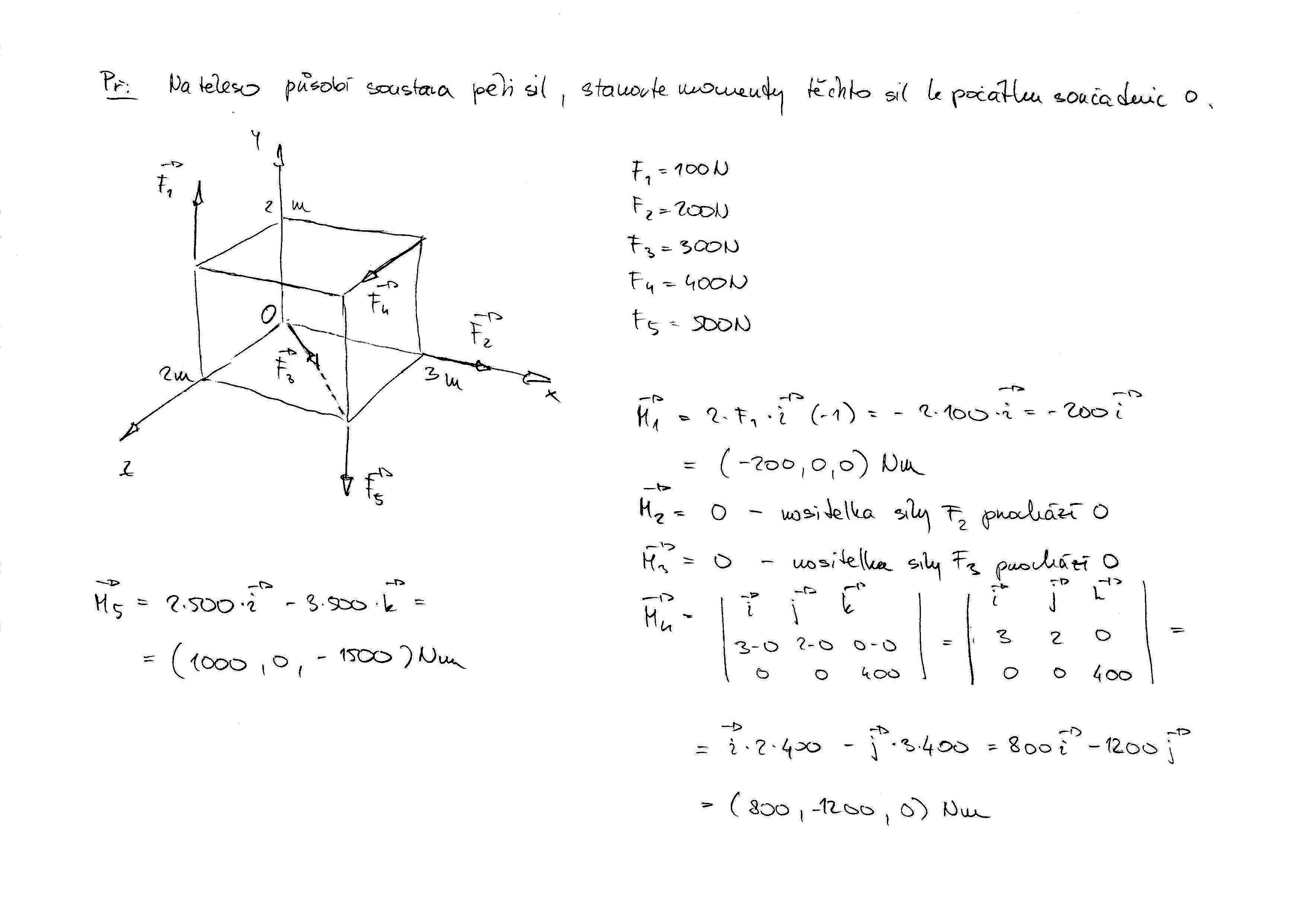
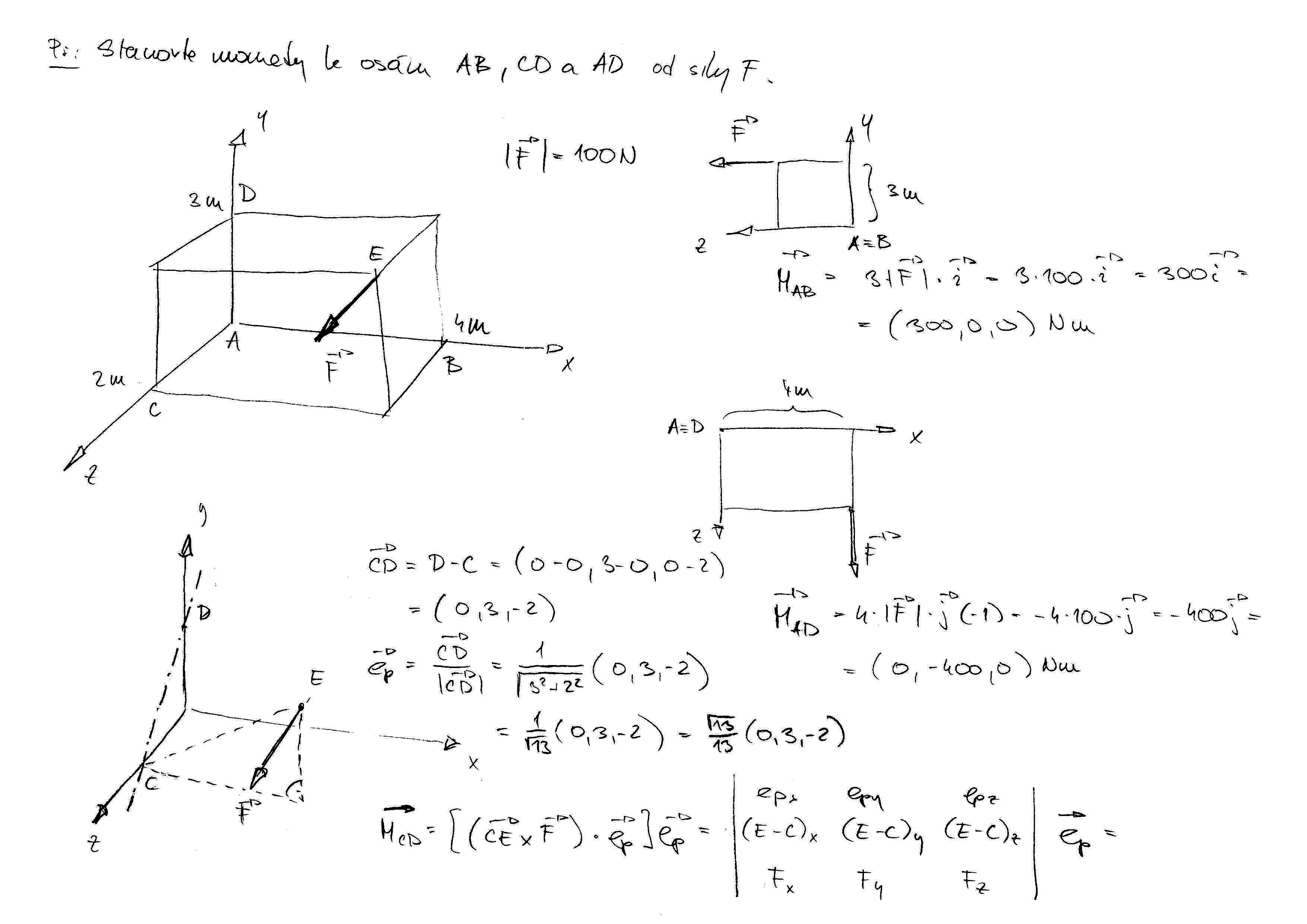
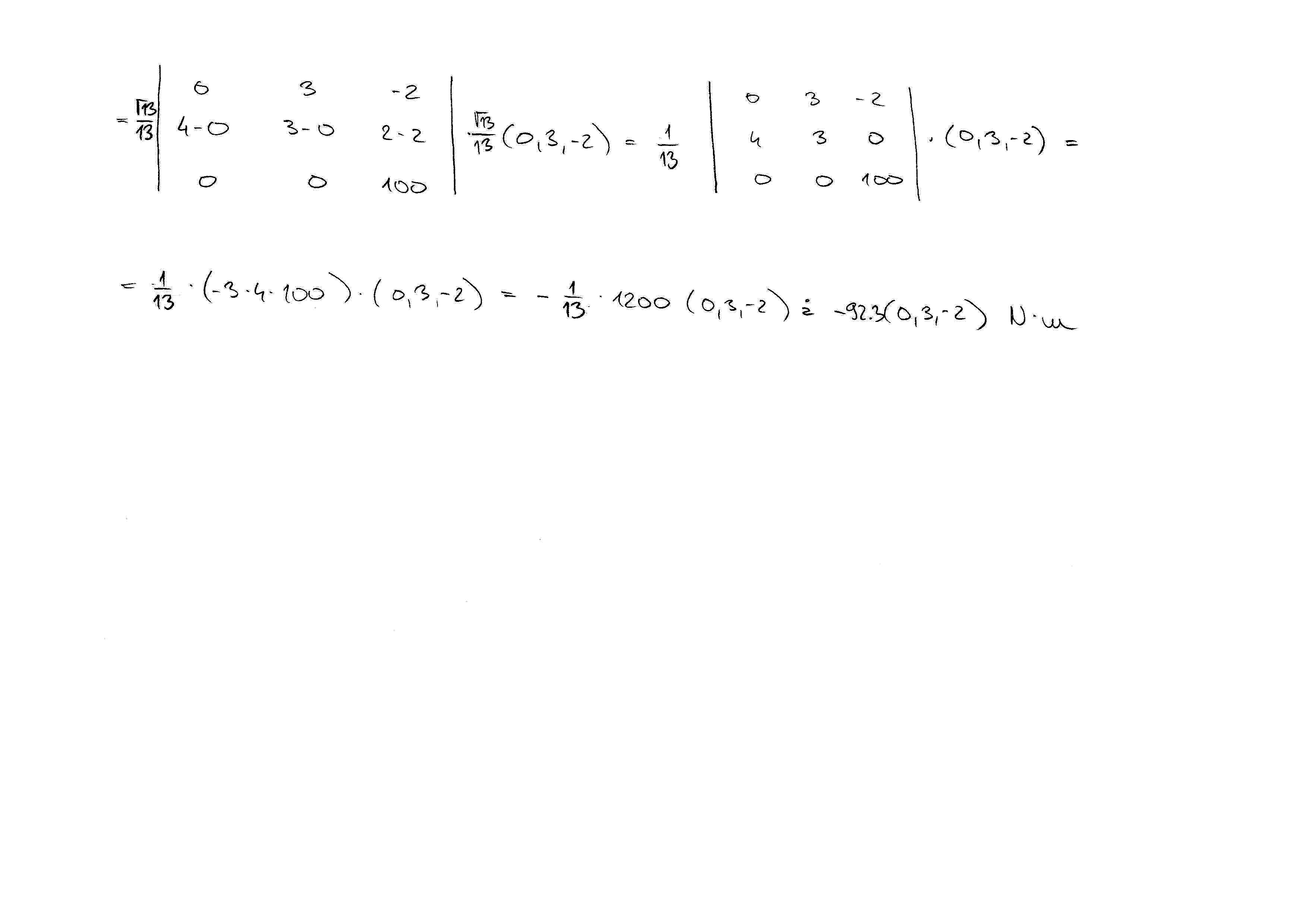
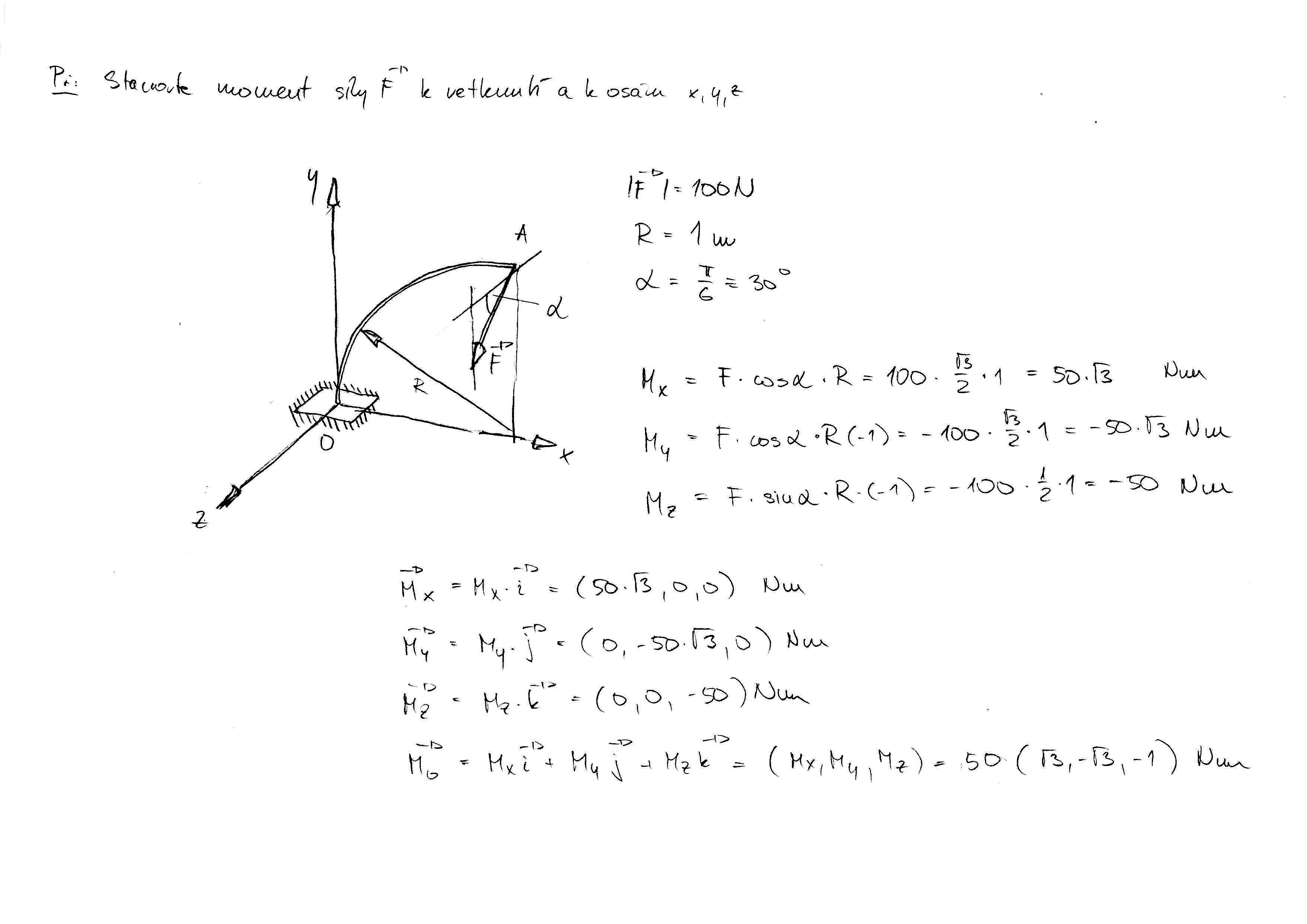
Cvičení 1: Síla, moment k bodu, moment k ose.
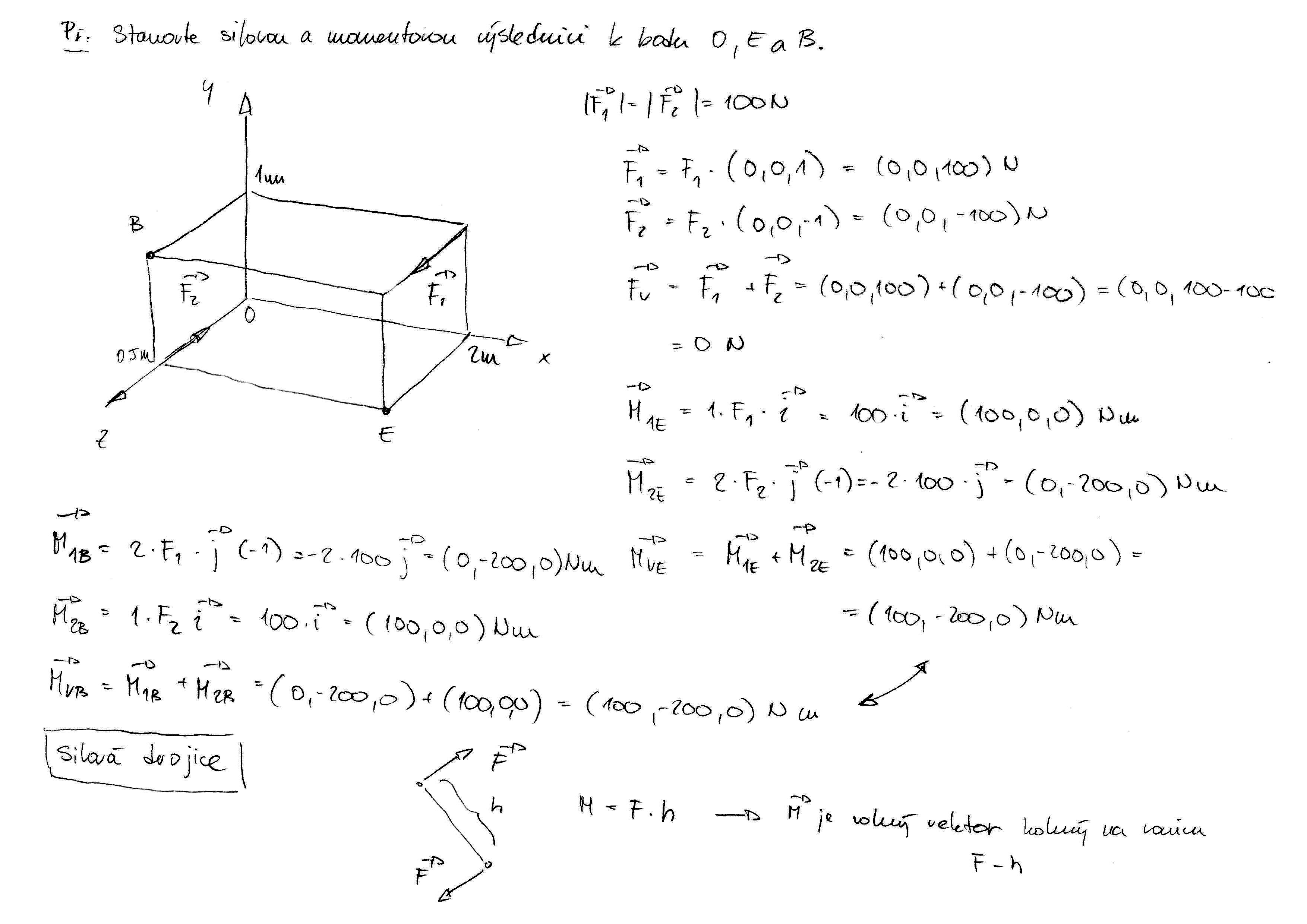
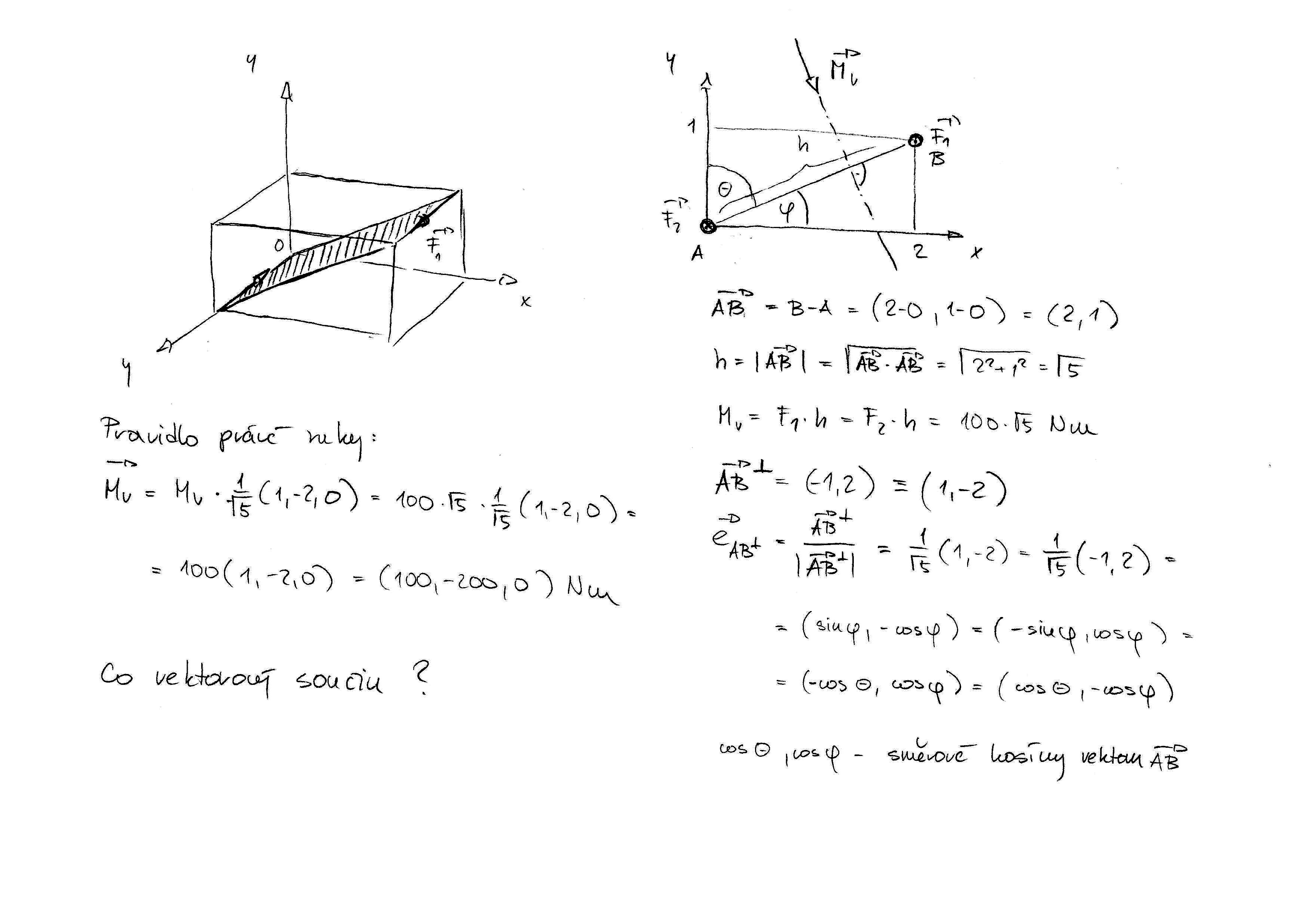
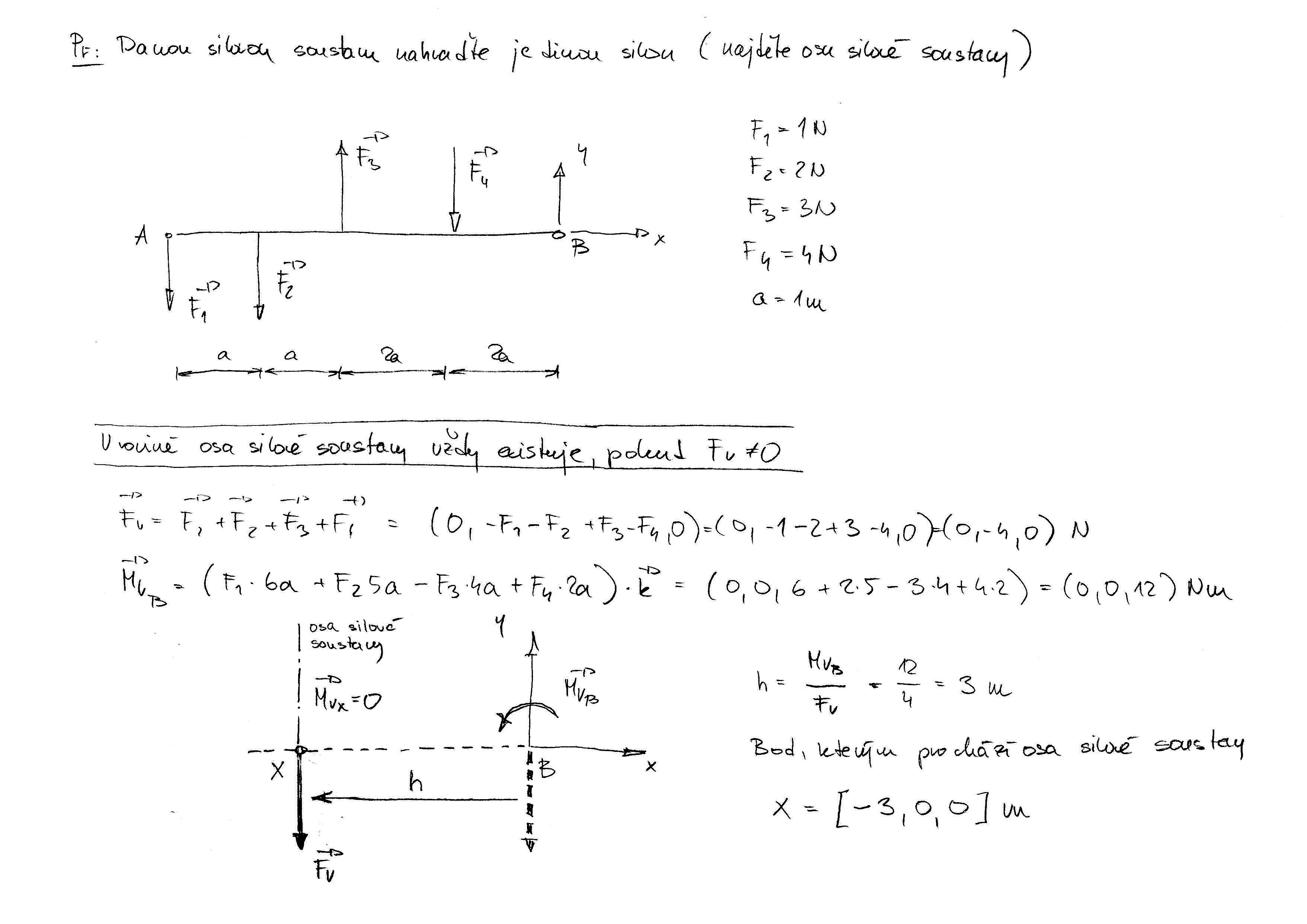
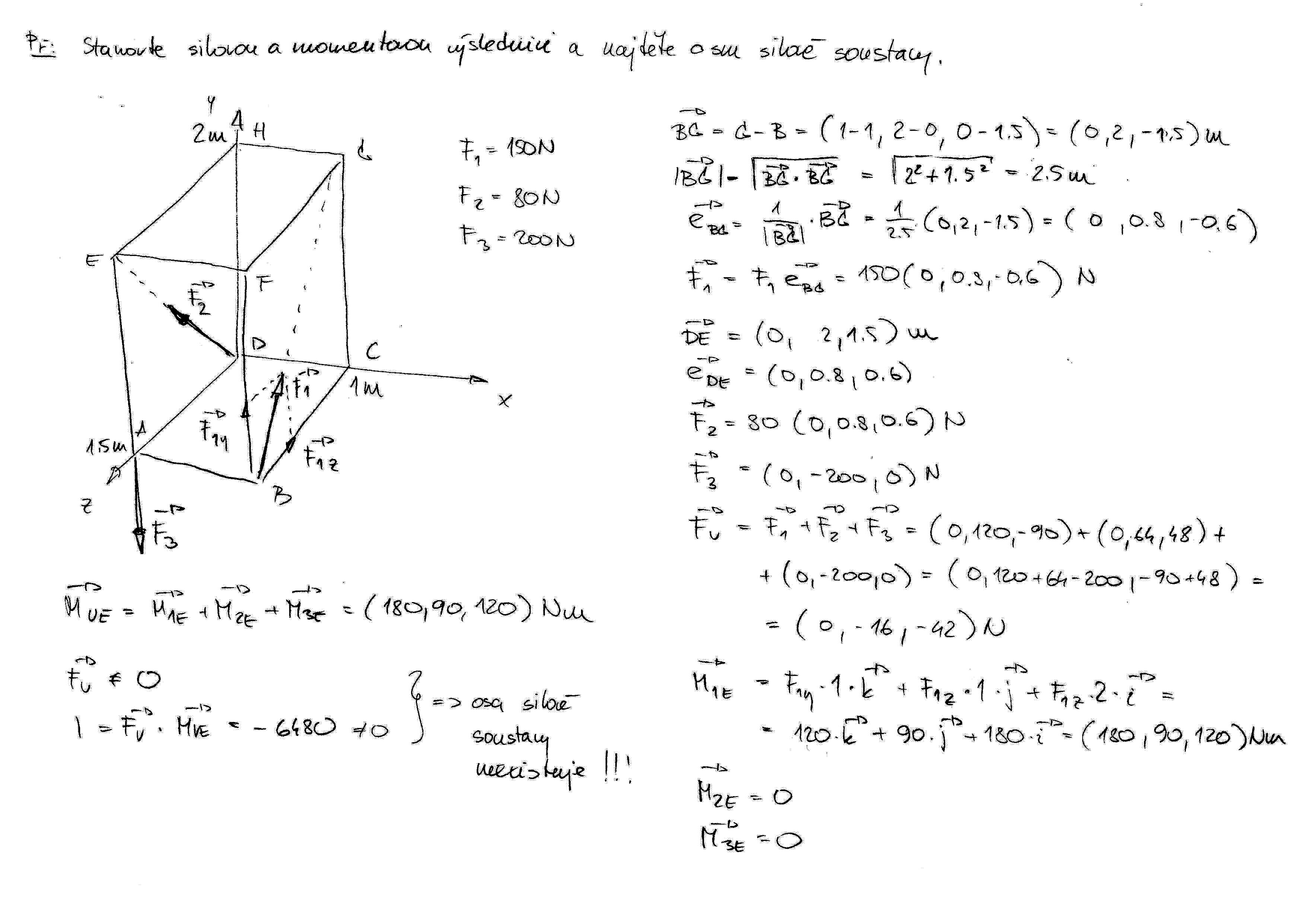
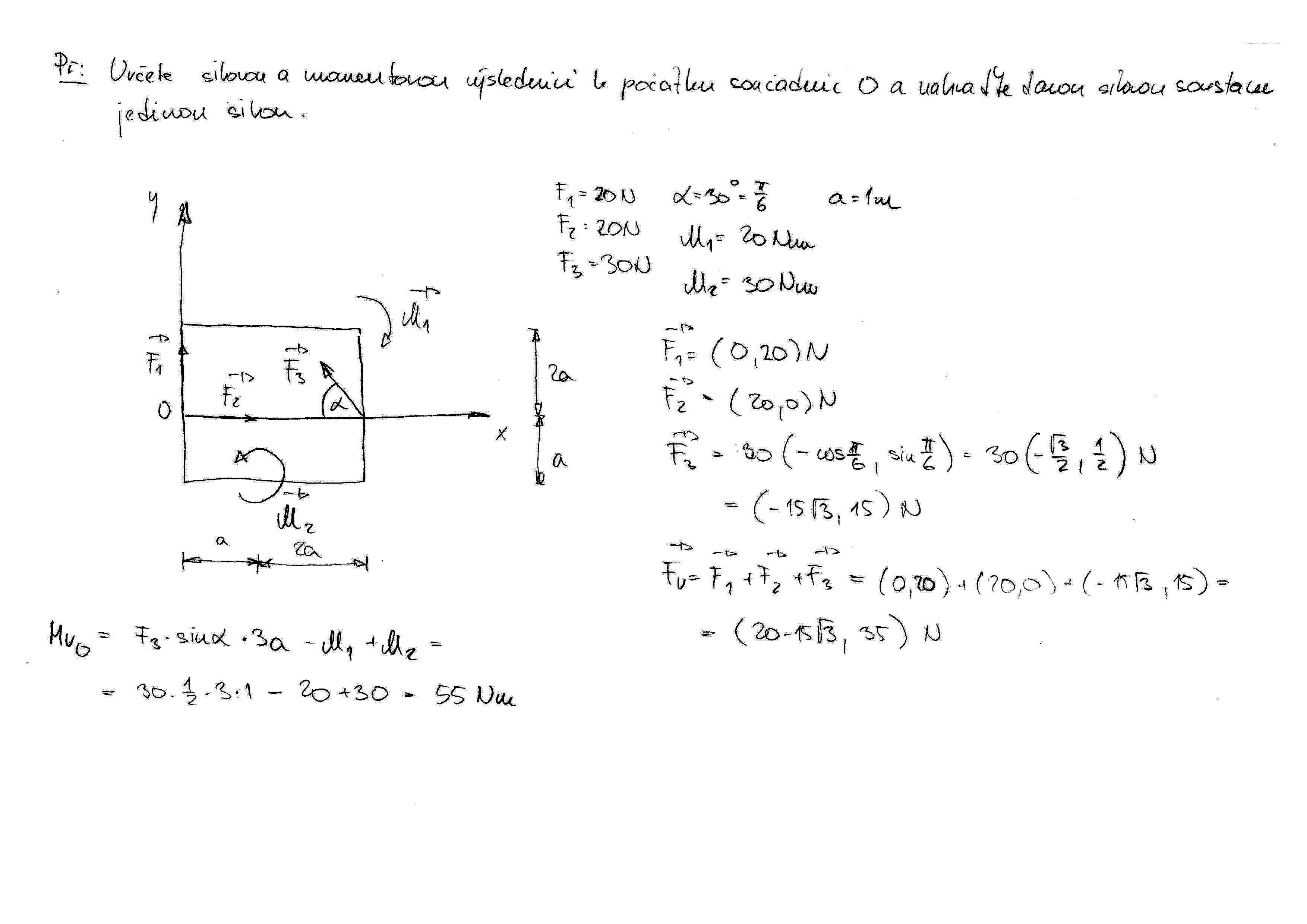
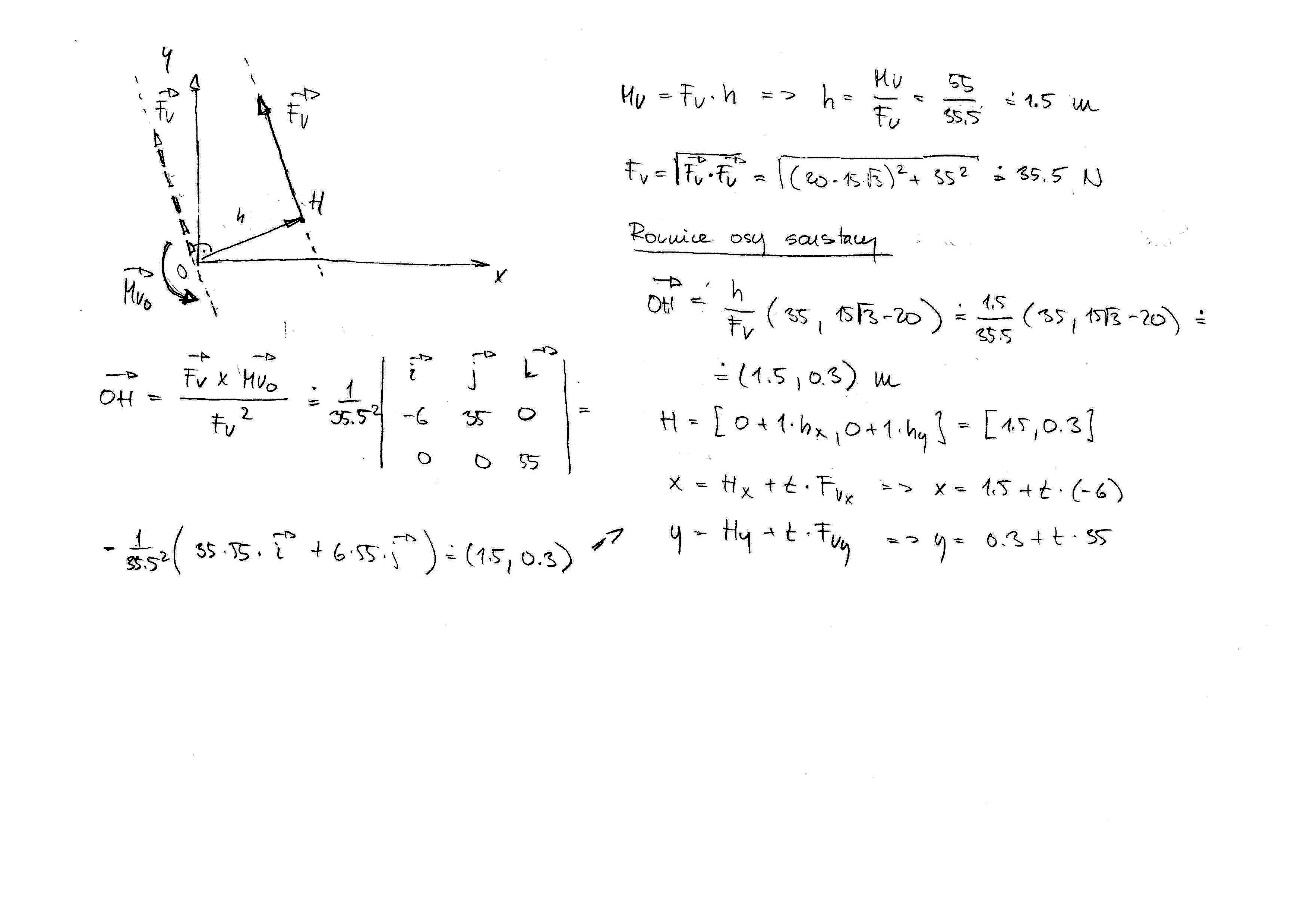
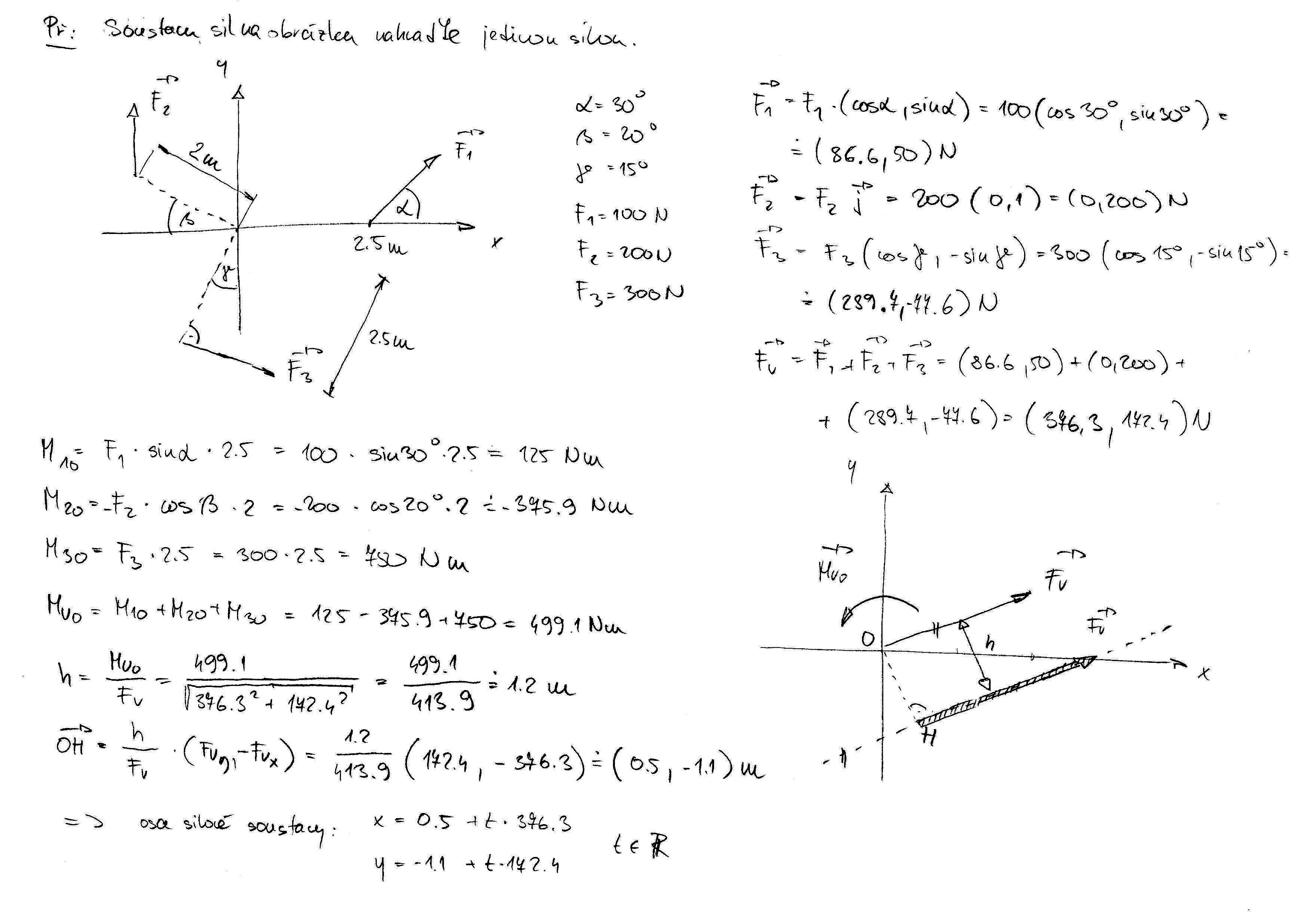
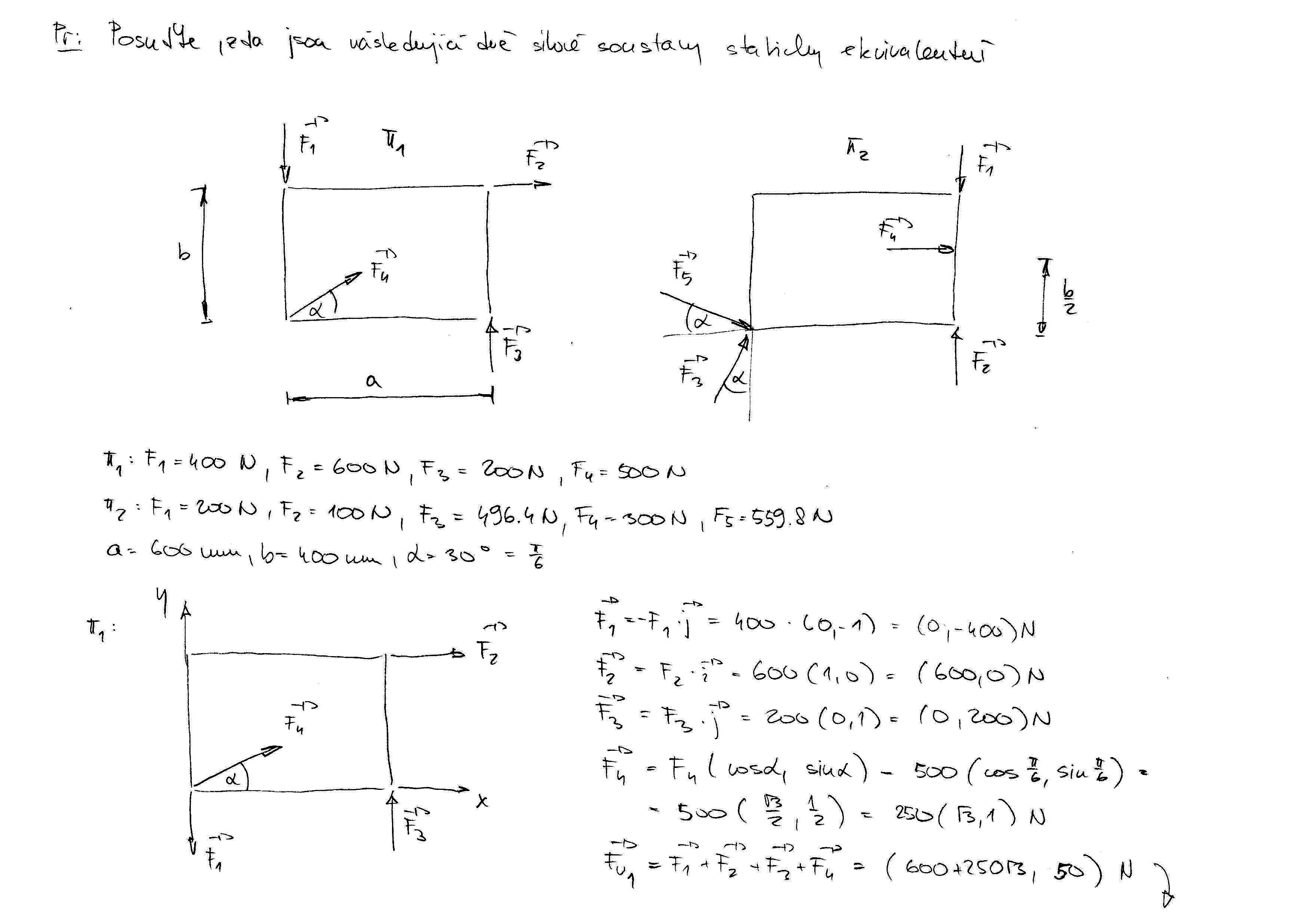
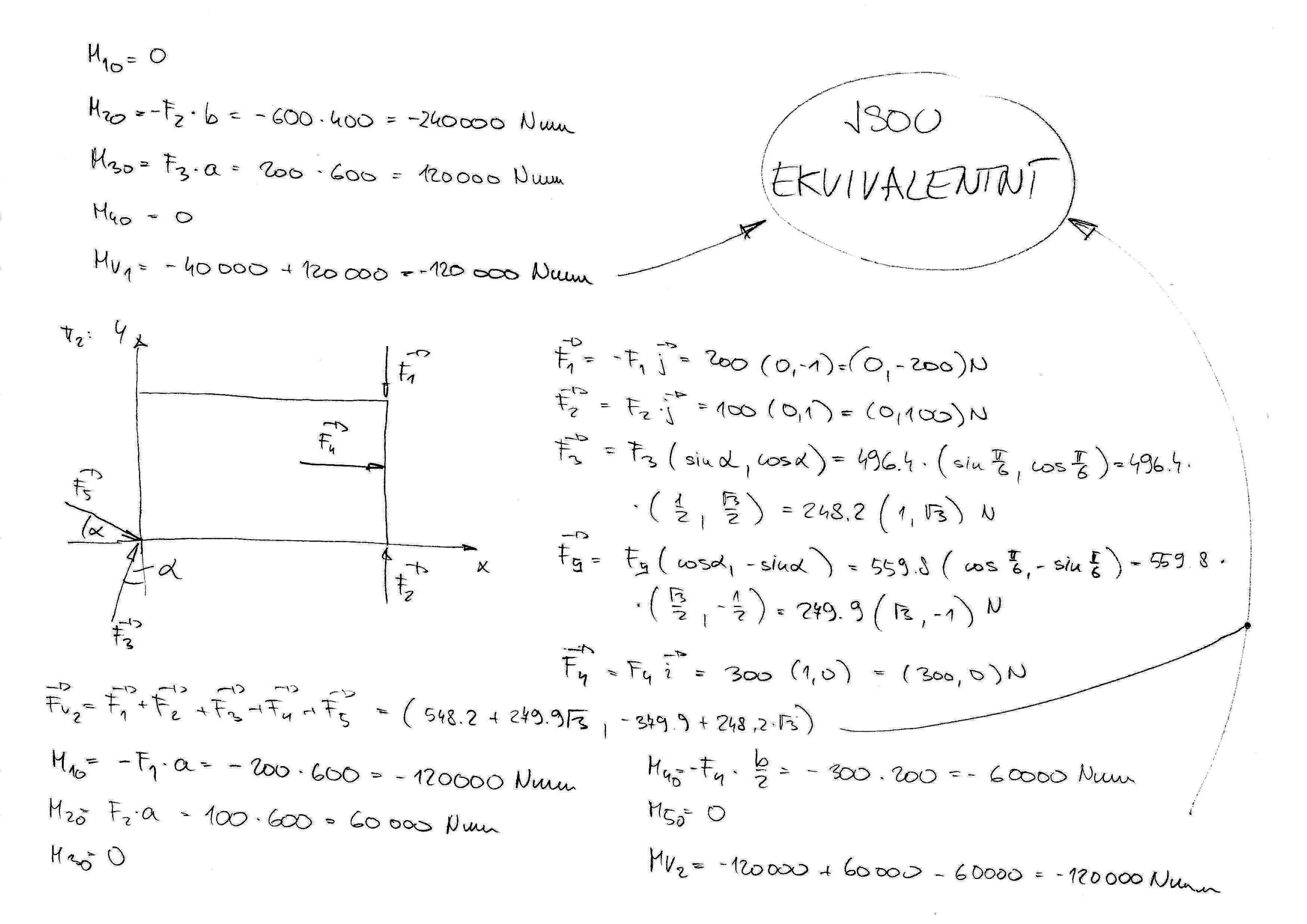
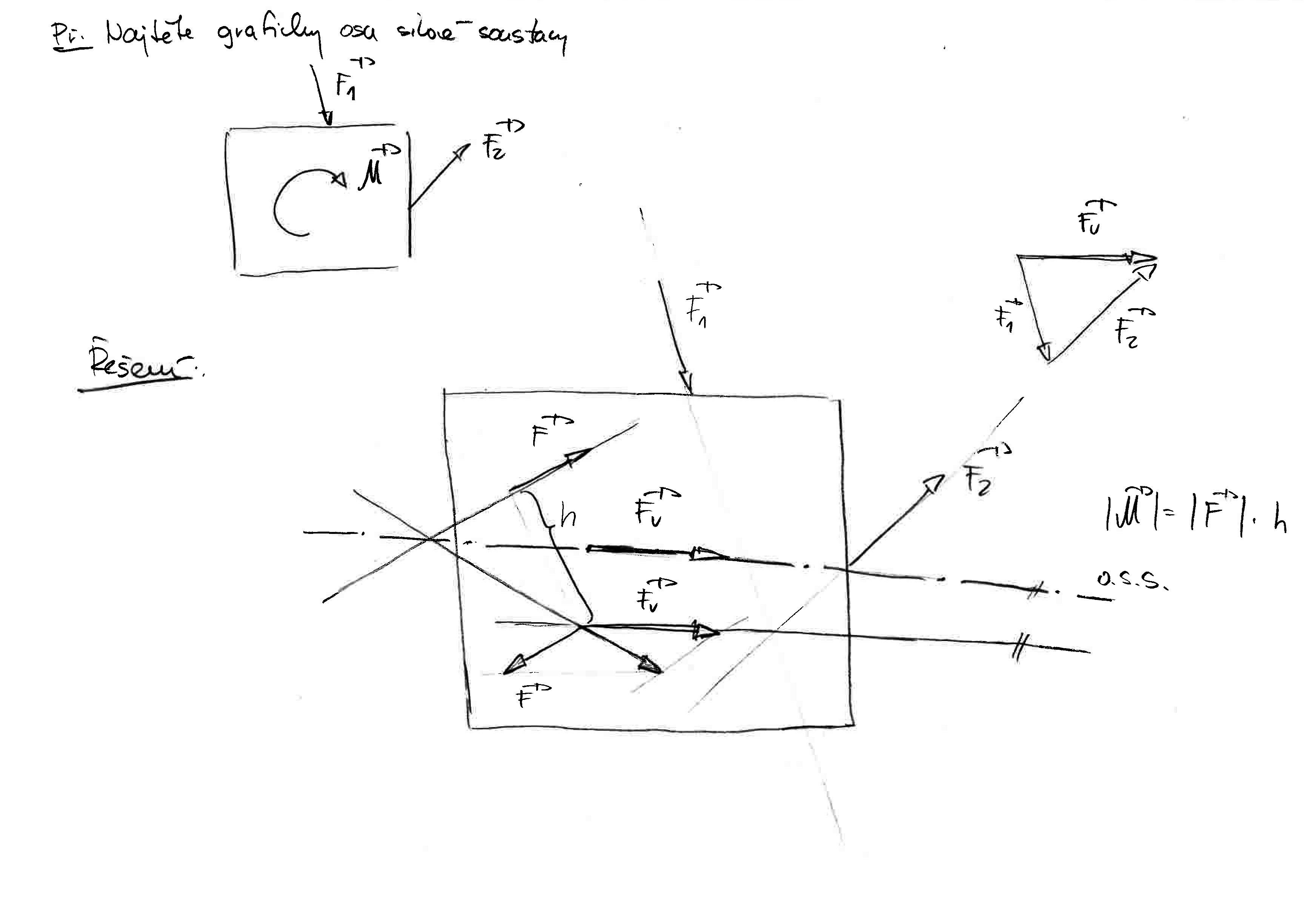
Cvičení 2: Silová a momentová výslednice, silová dvojice, osa silové soustavy.
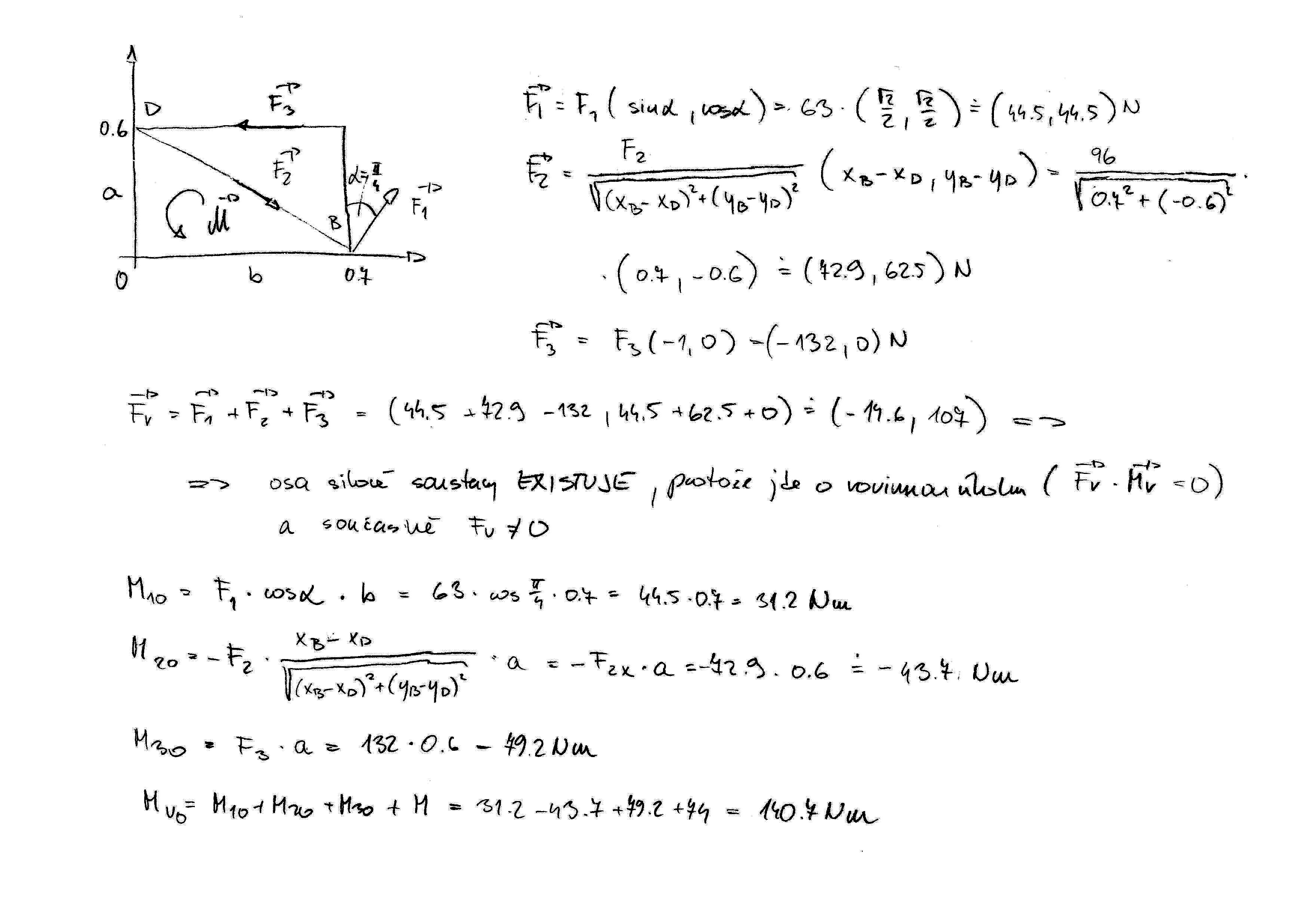
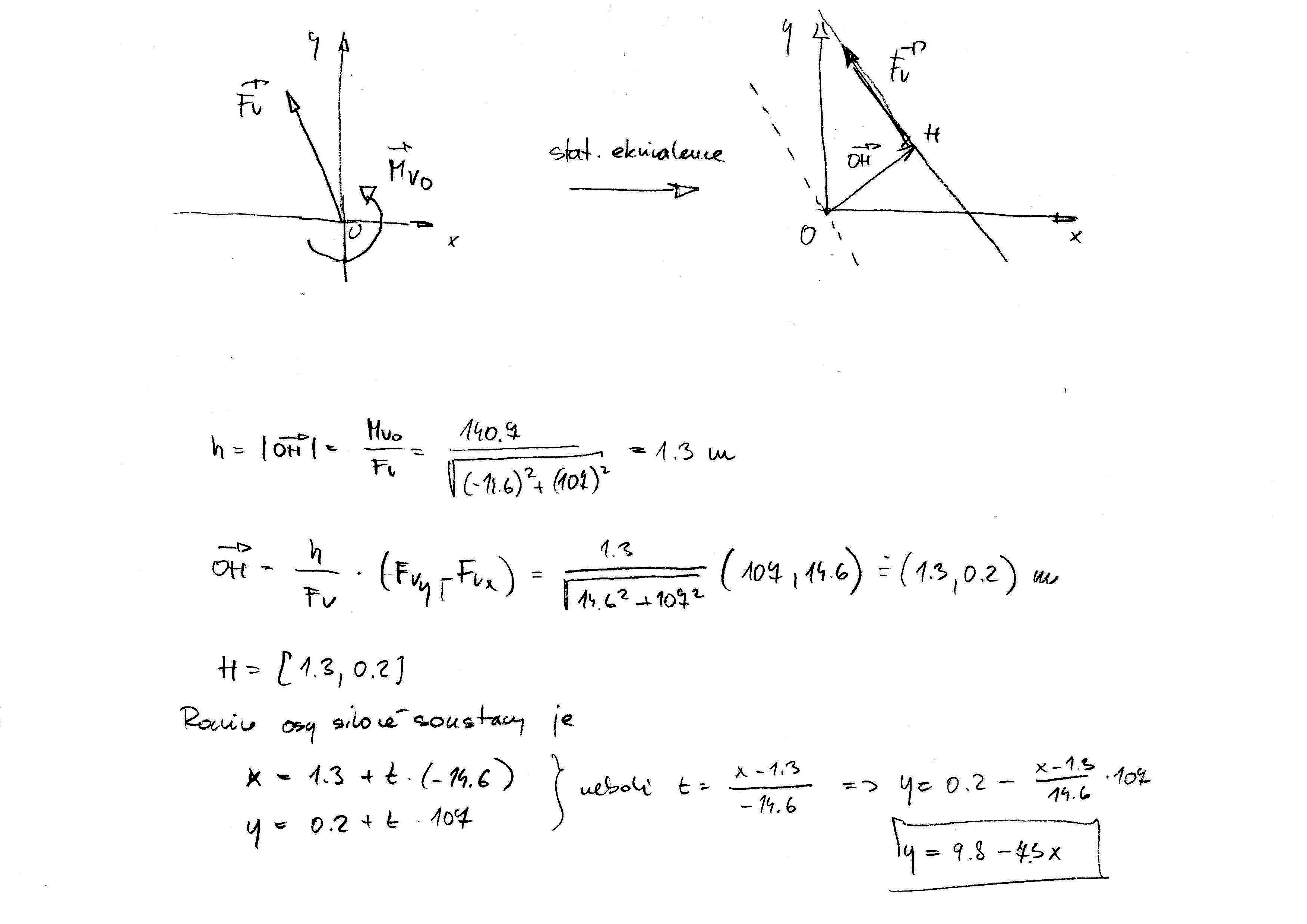
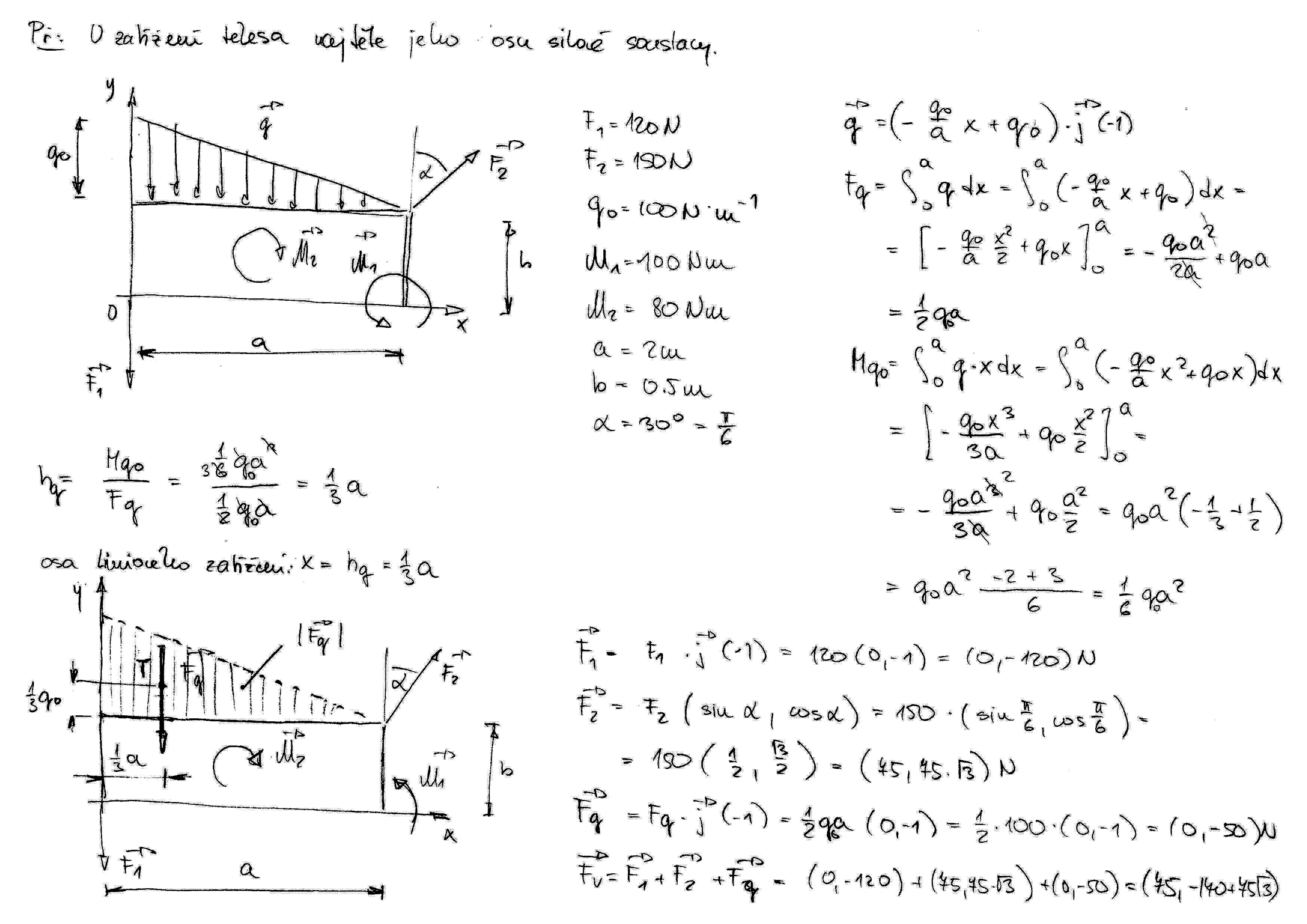
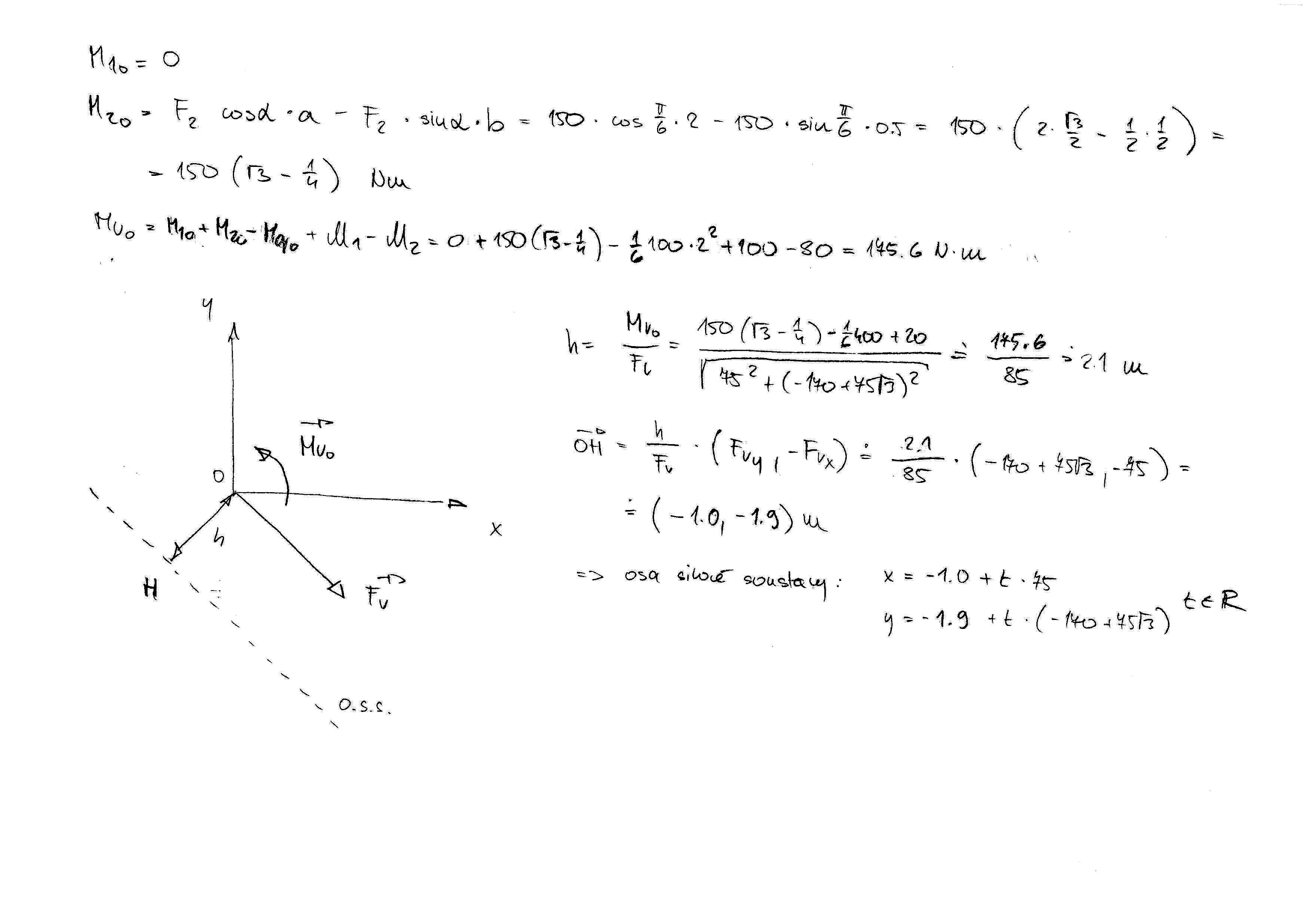
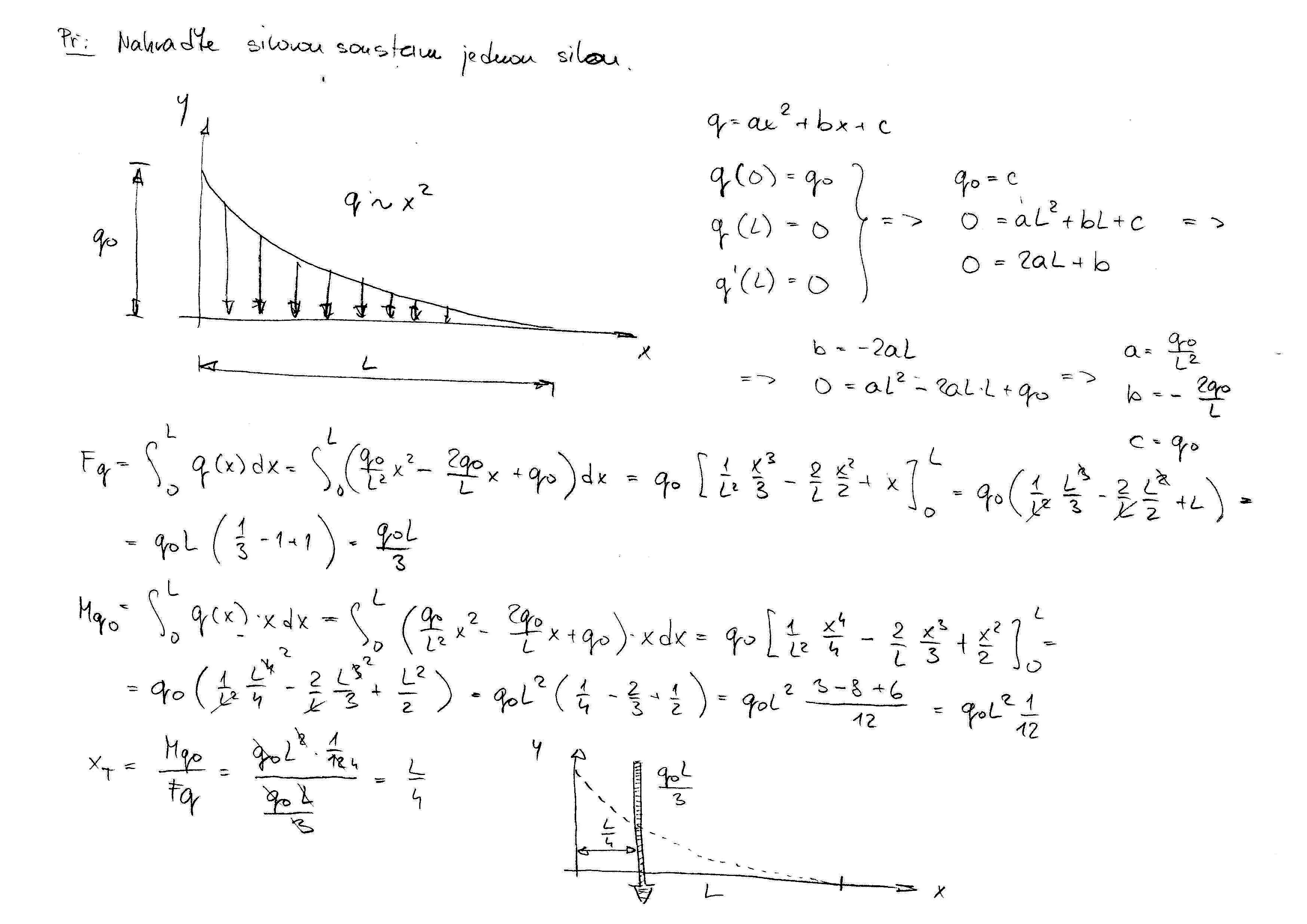
Cvičení 3: Osa silové soustavy, liniové zatížení, statická ekvivalence.
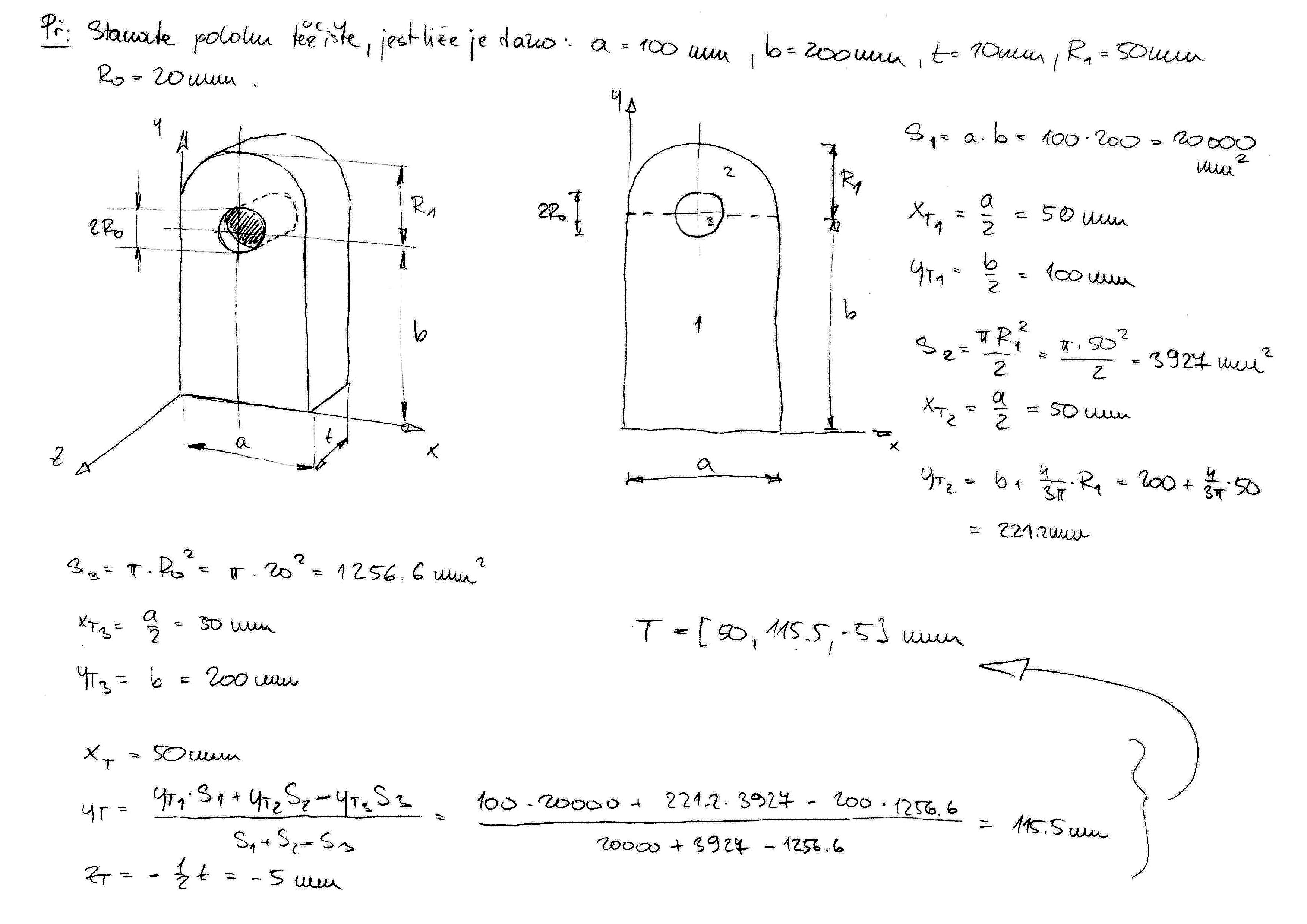
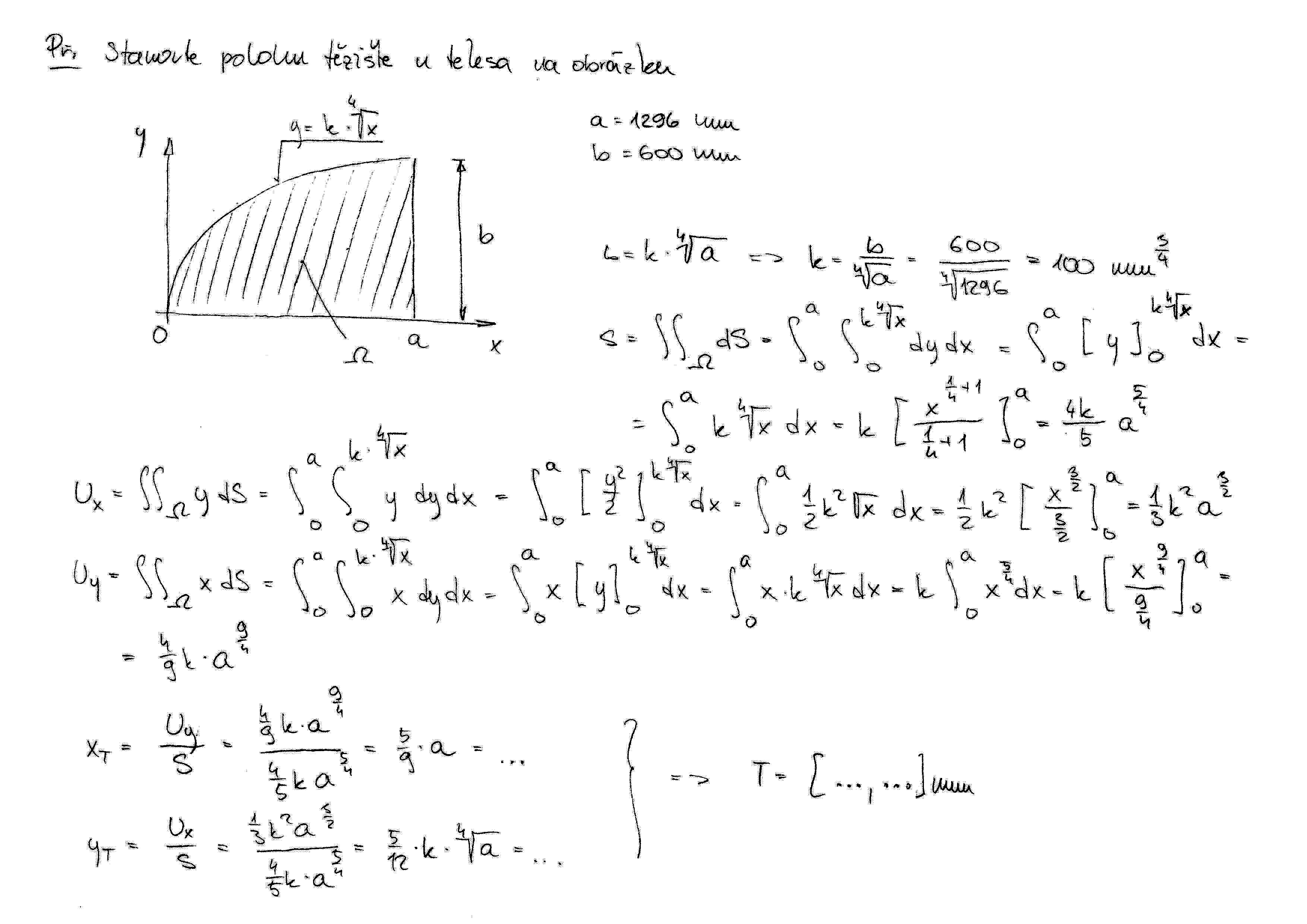
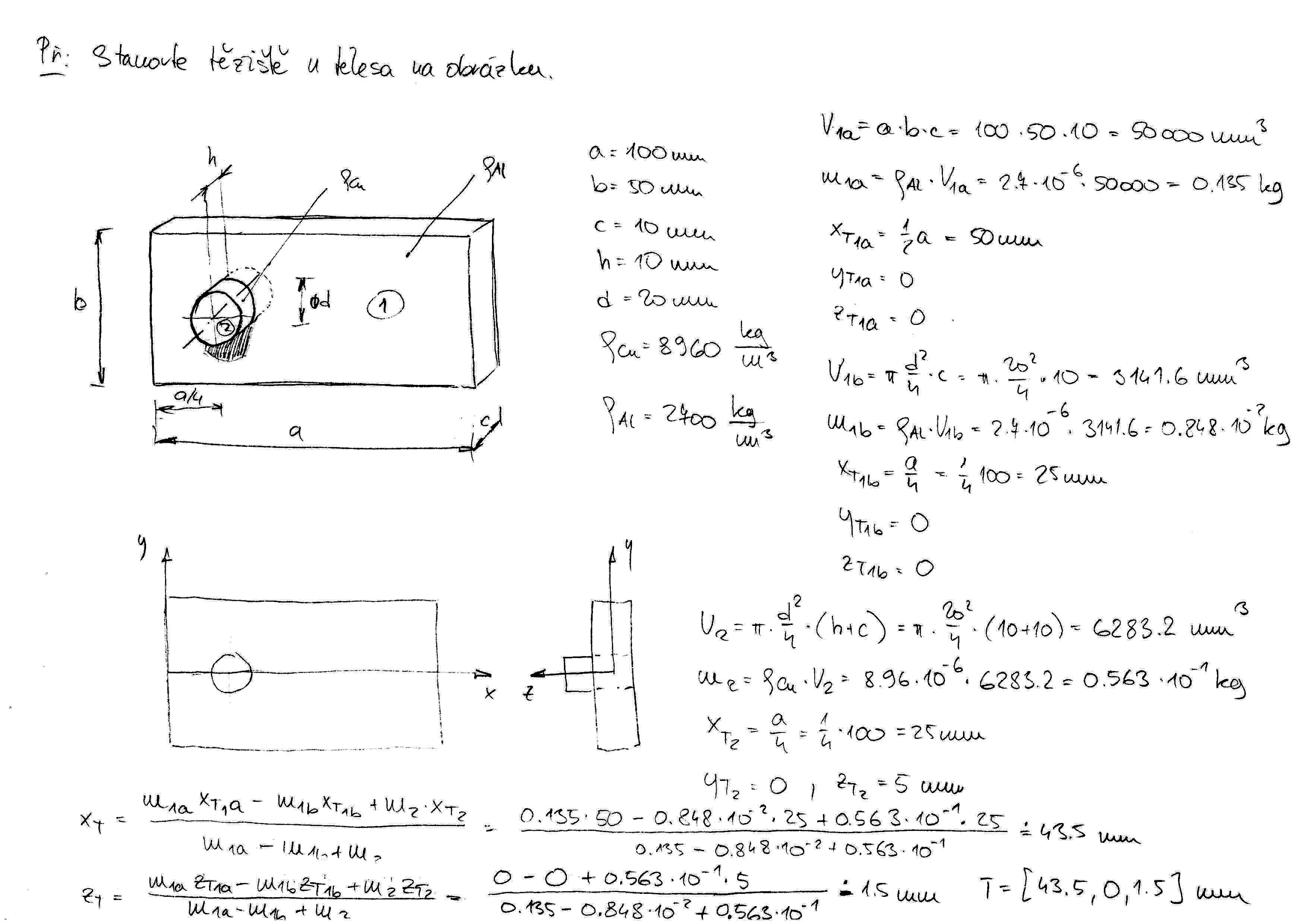
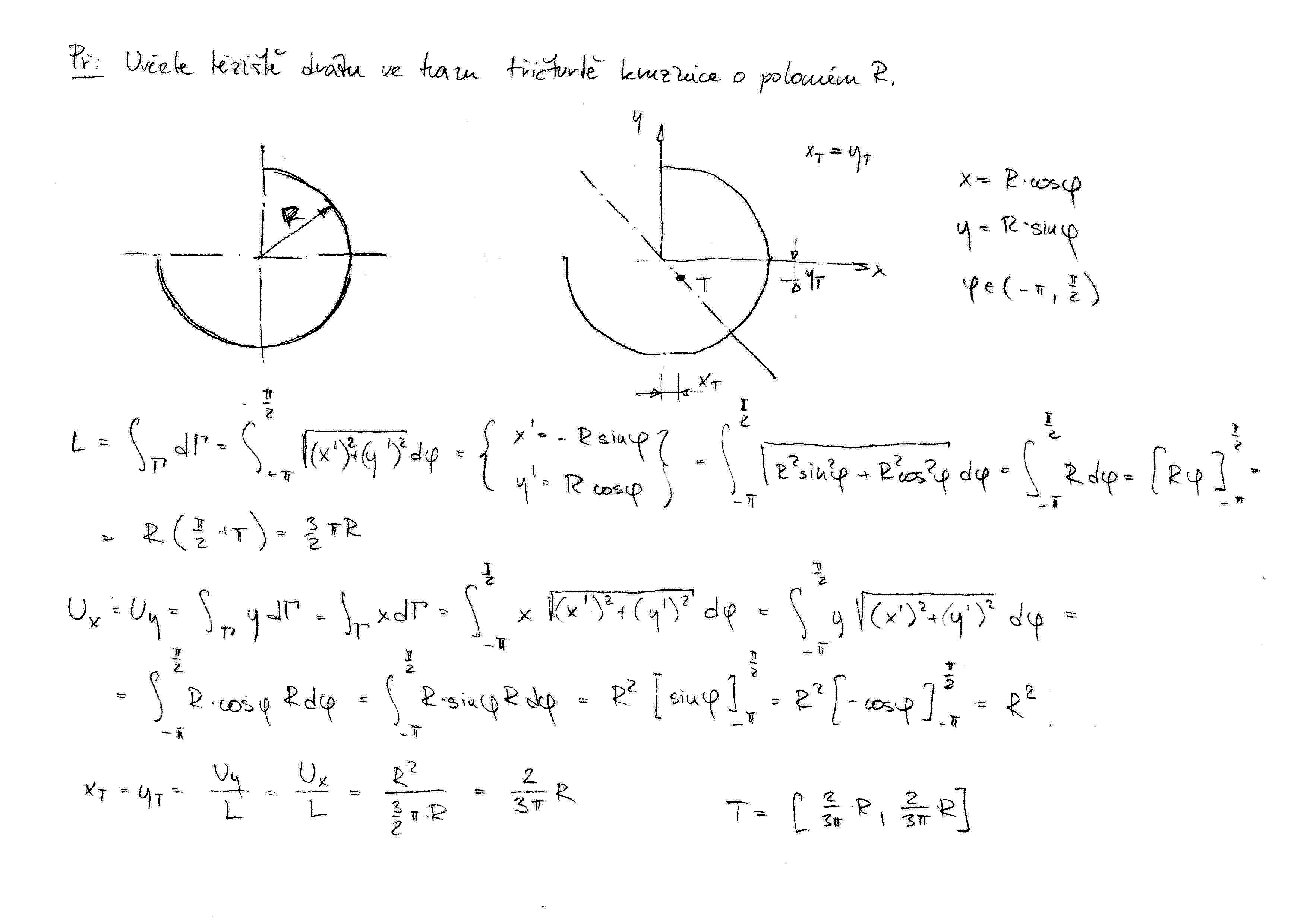
Cvičení 4: Těžiště.
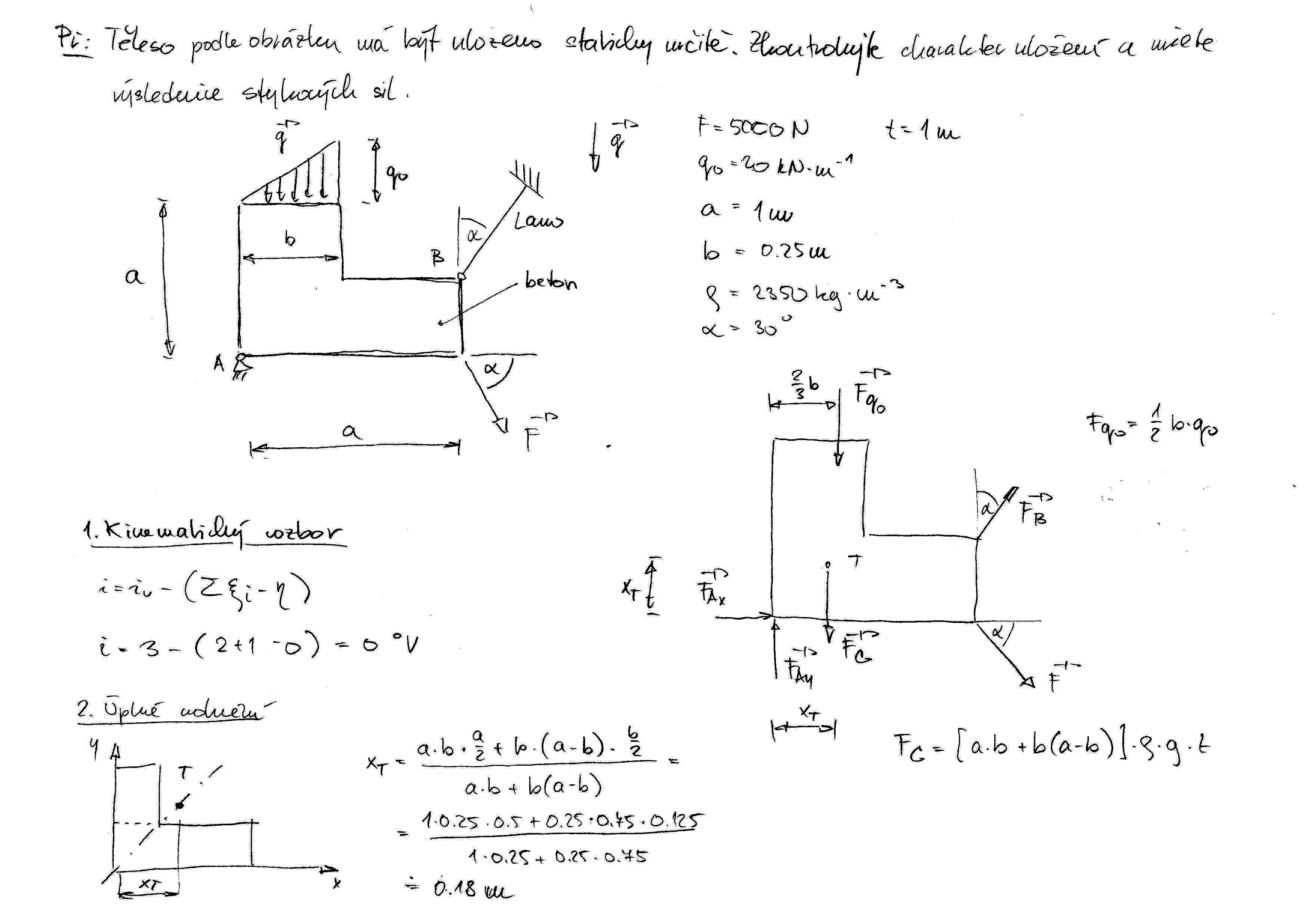
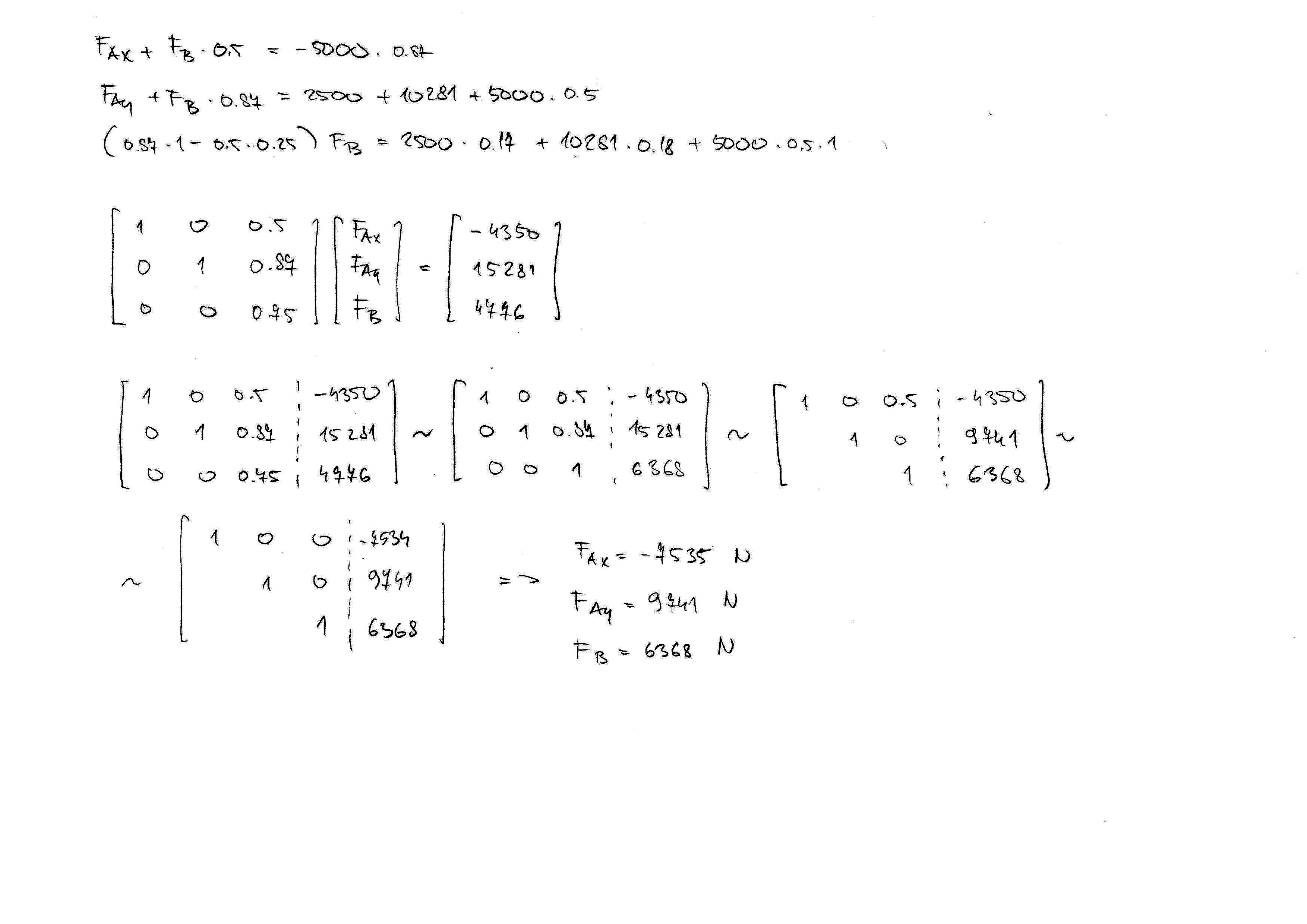
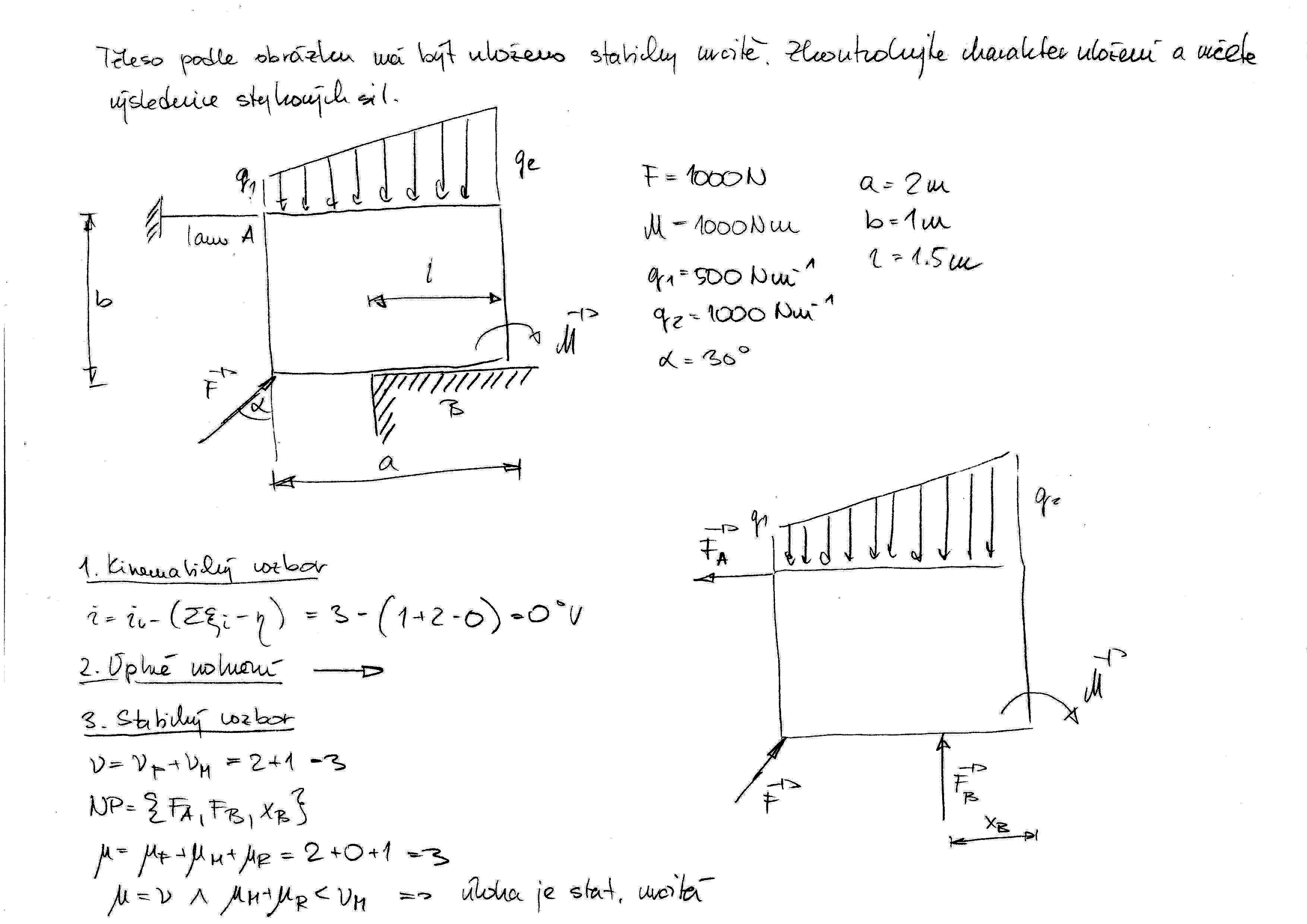
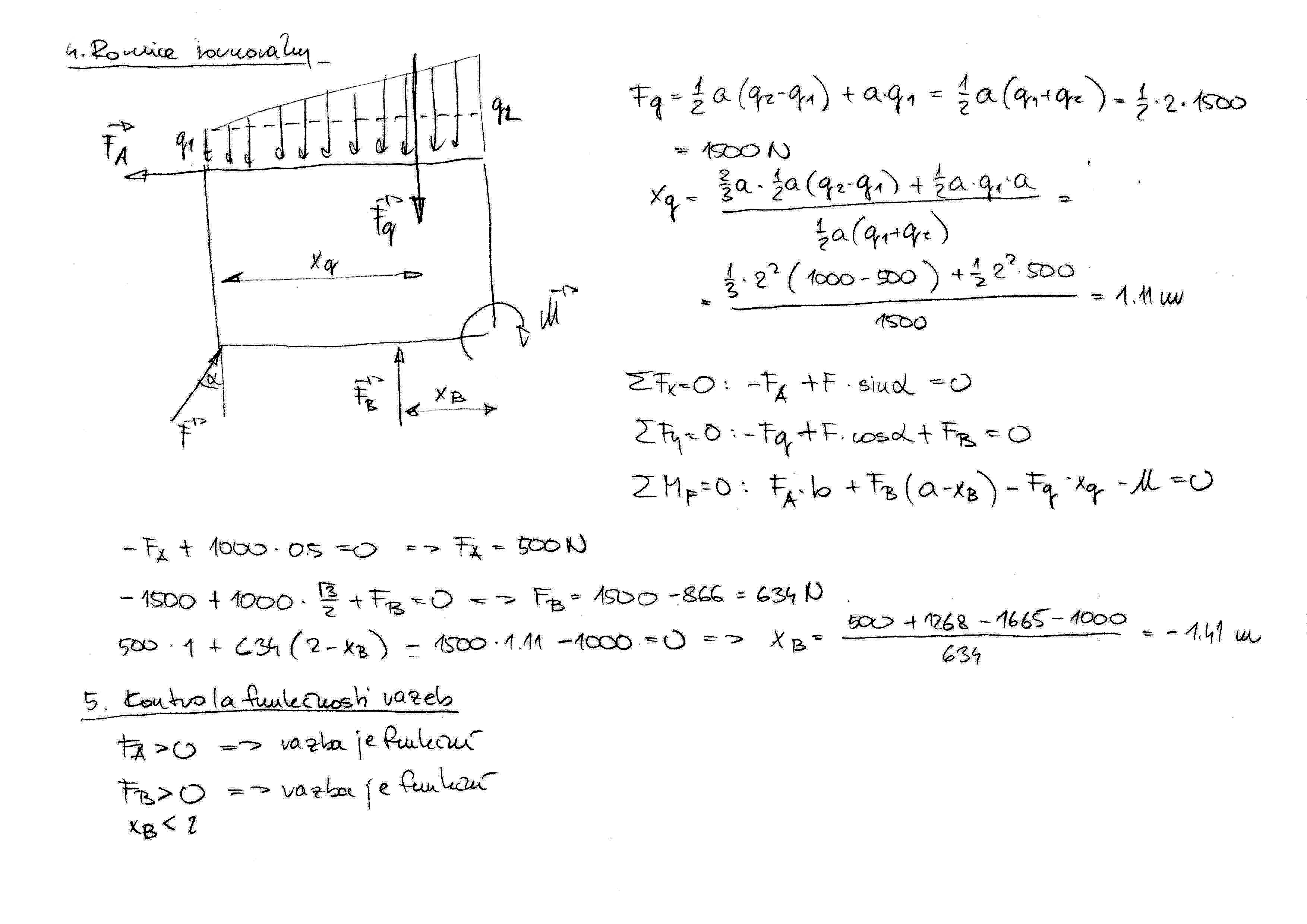
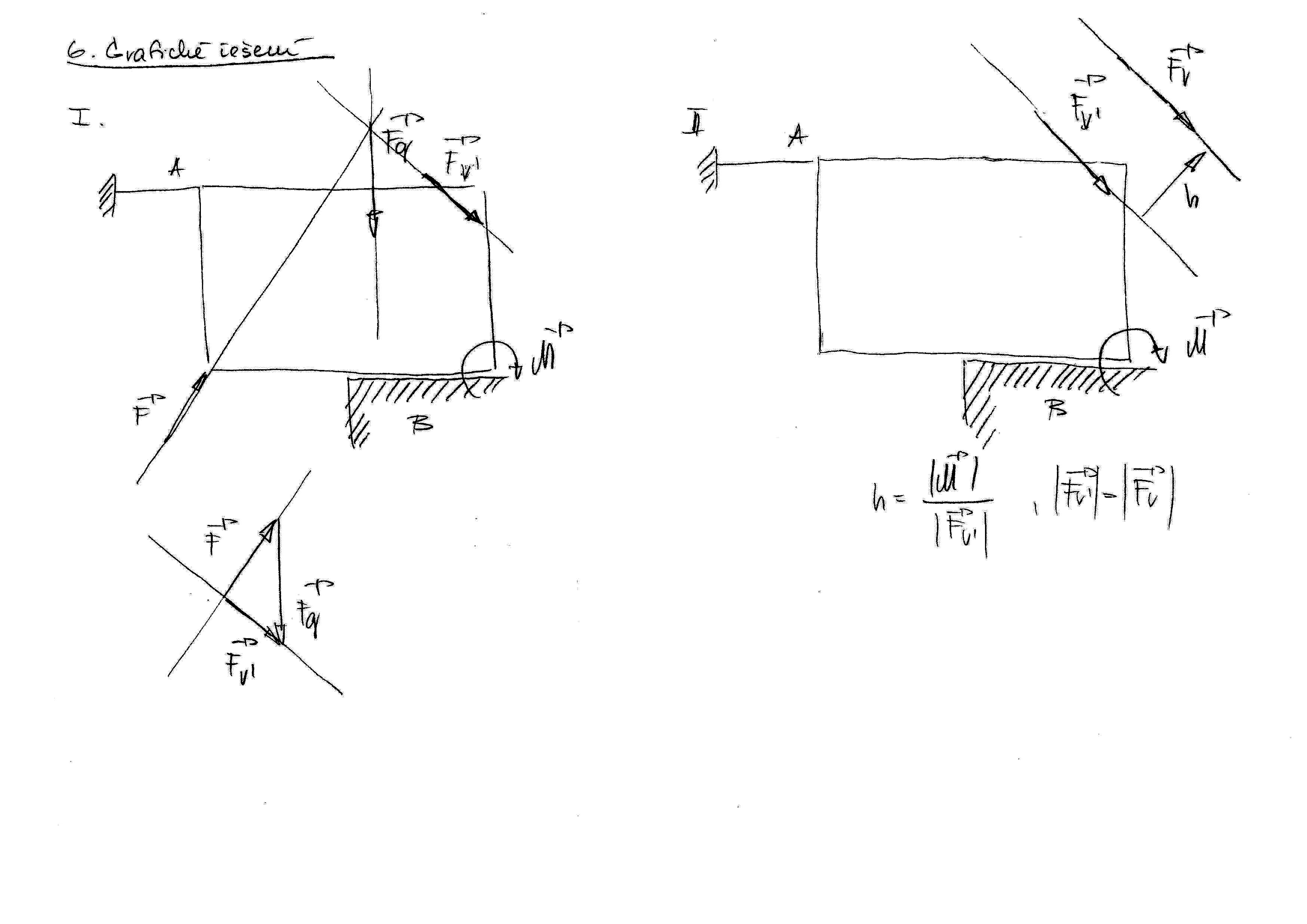
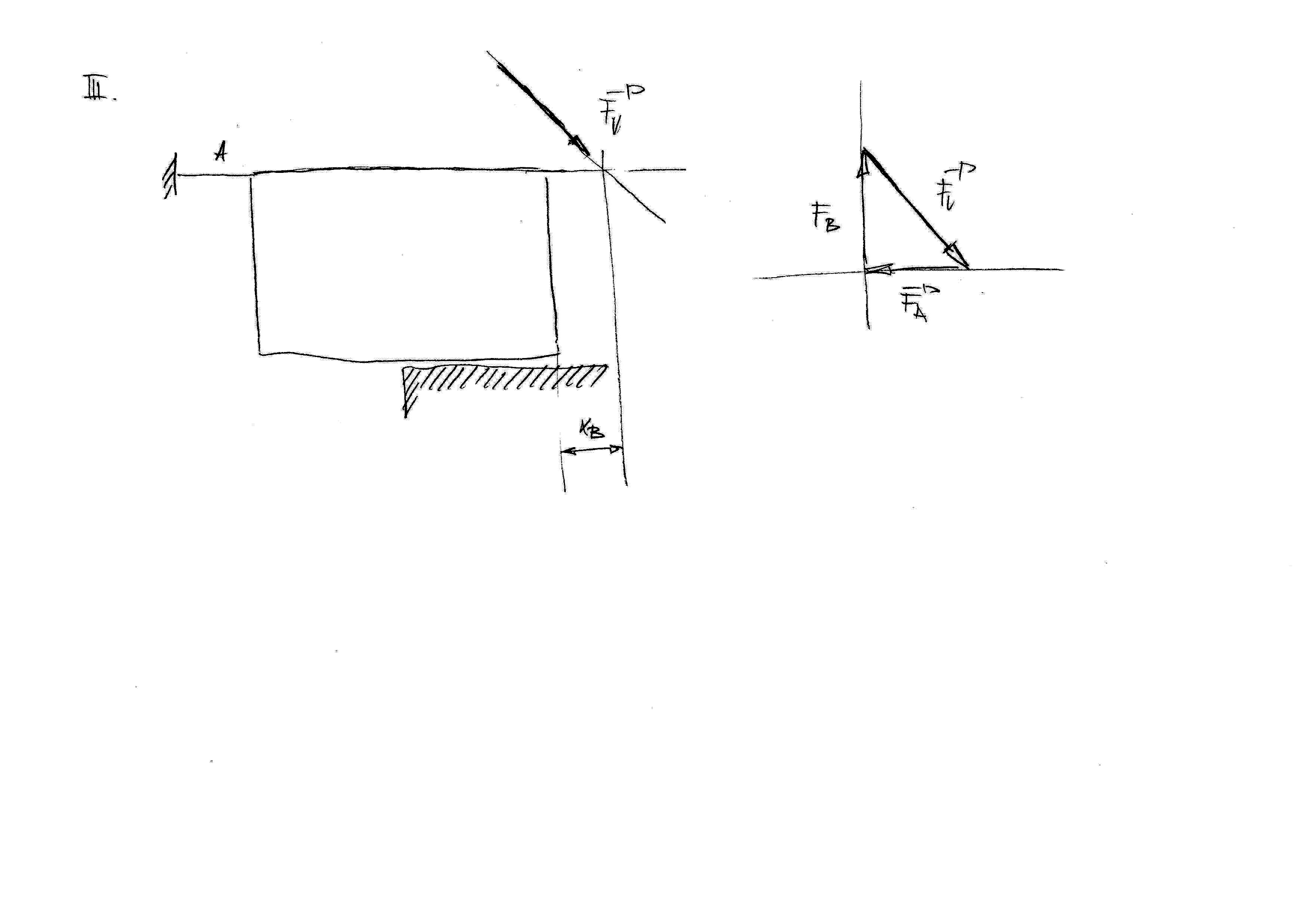
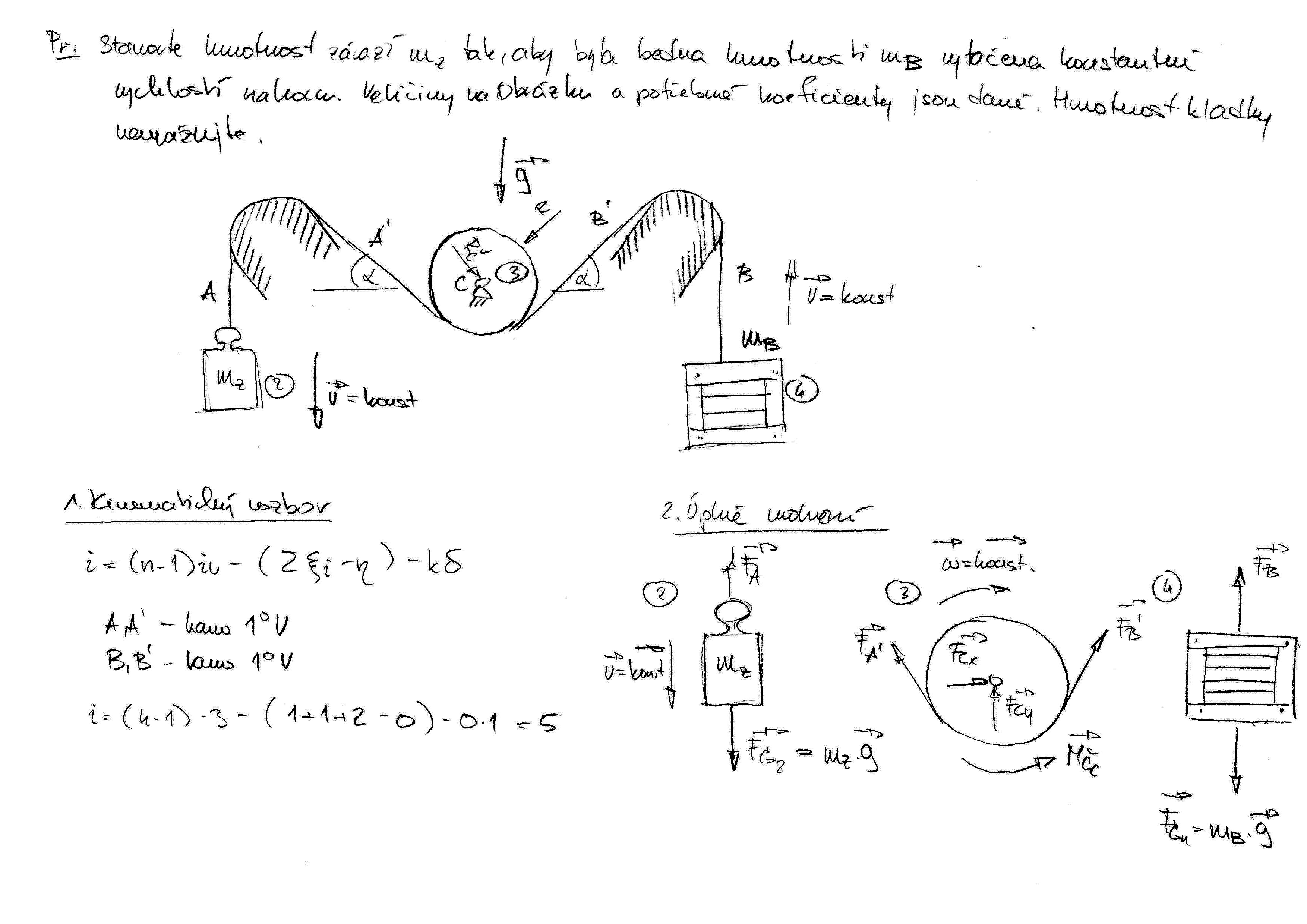
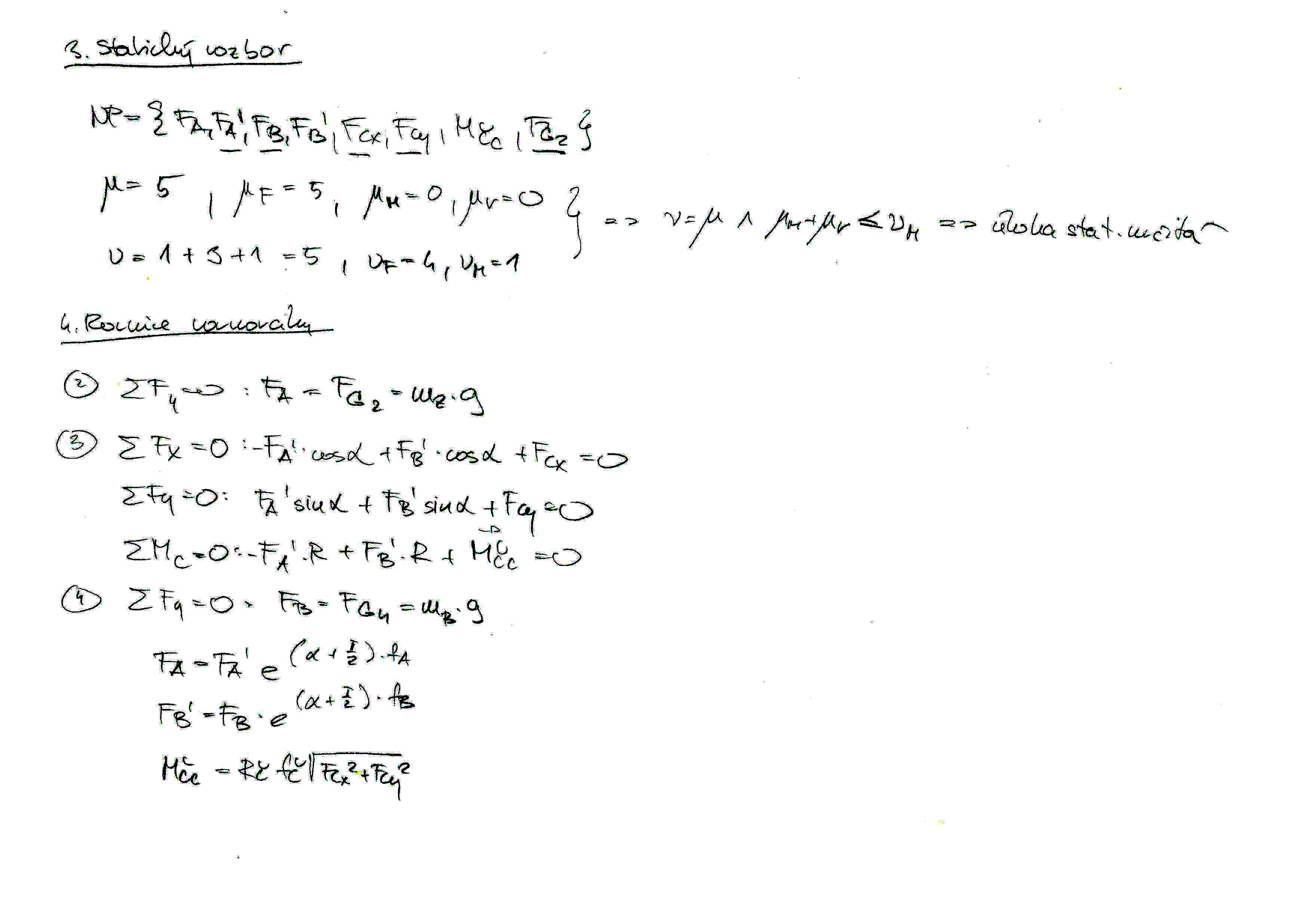
Cvičení 5: Vázané těleso.
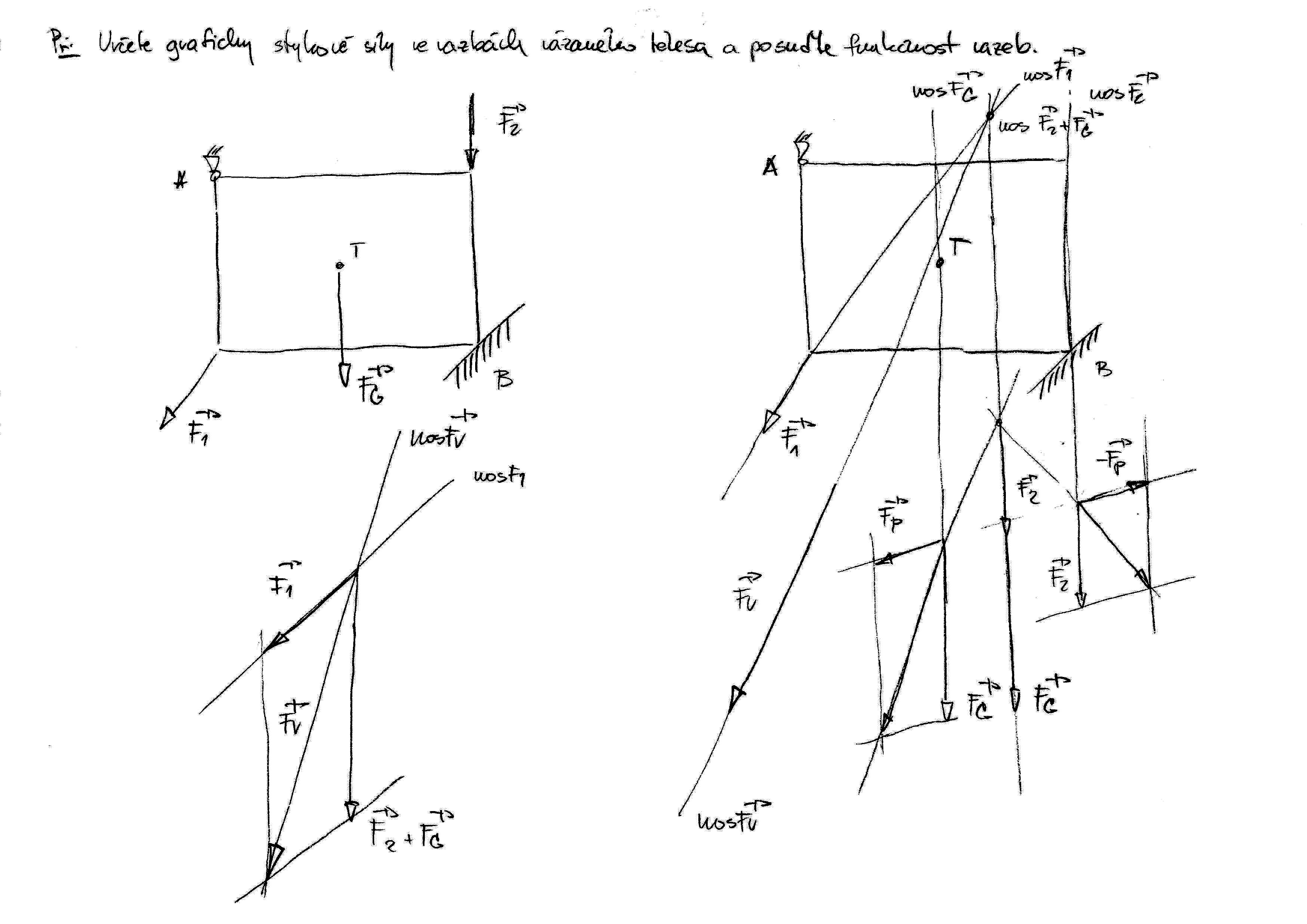
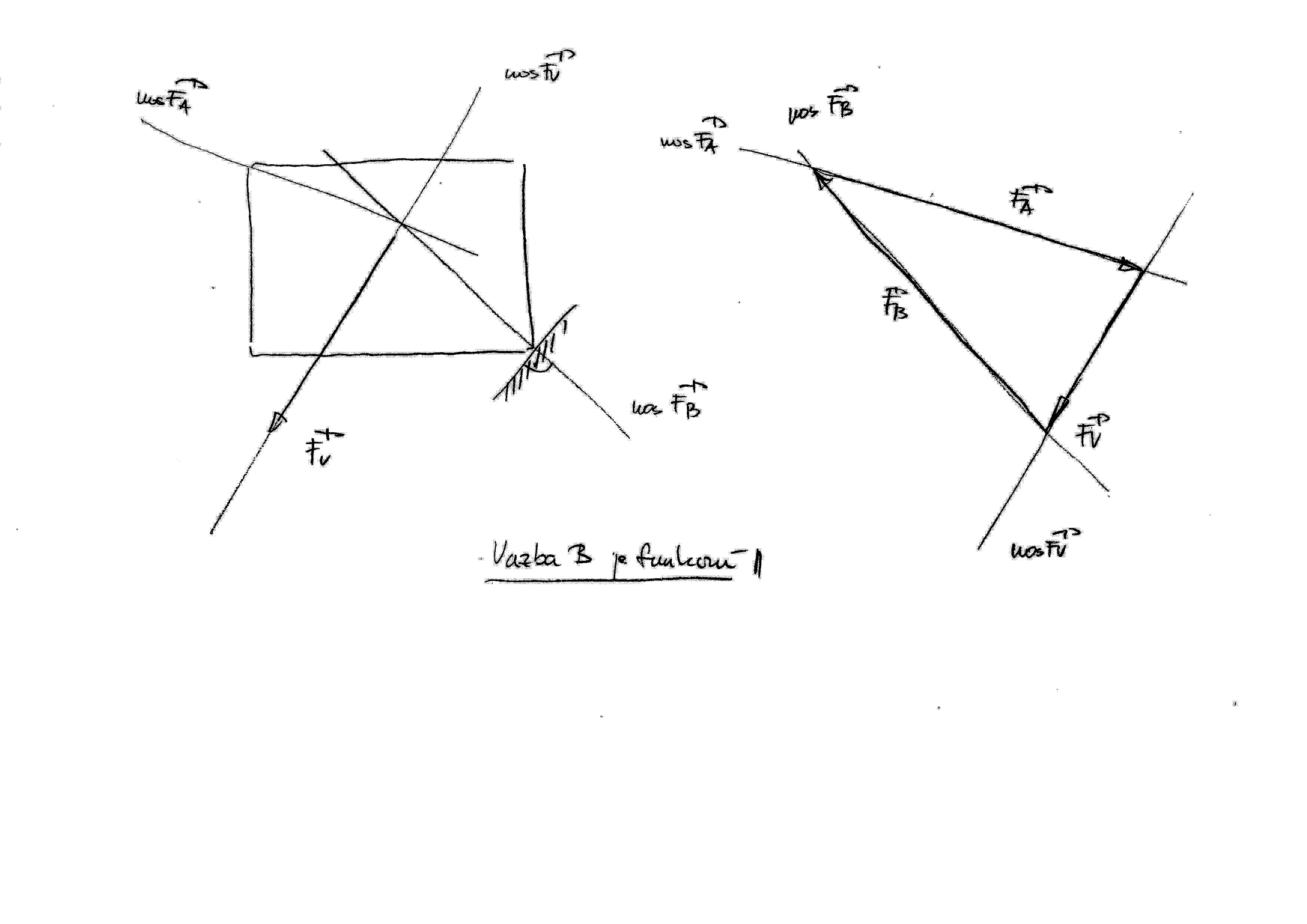
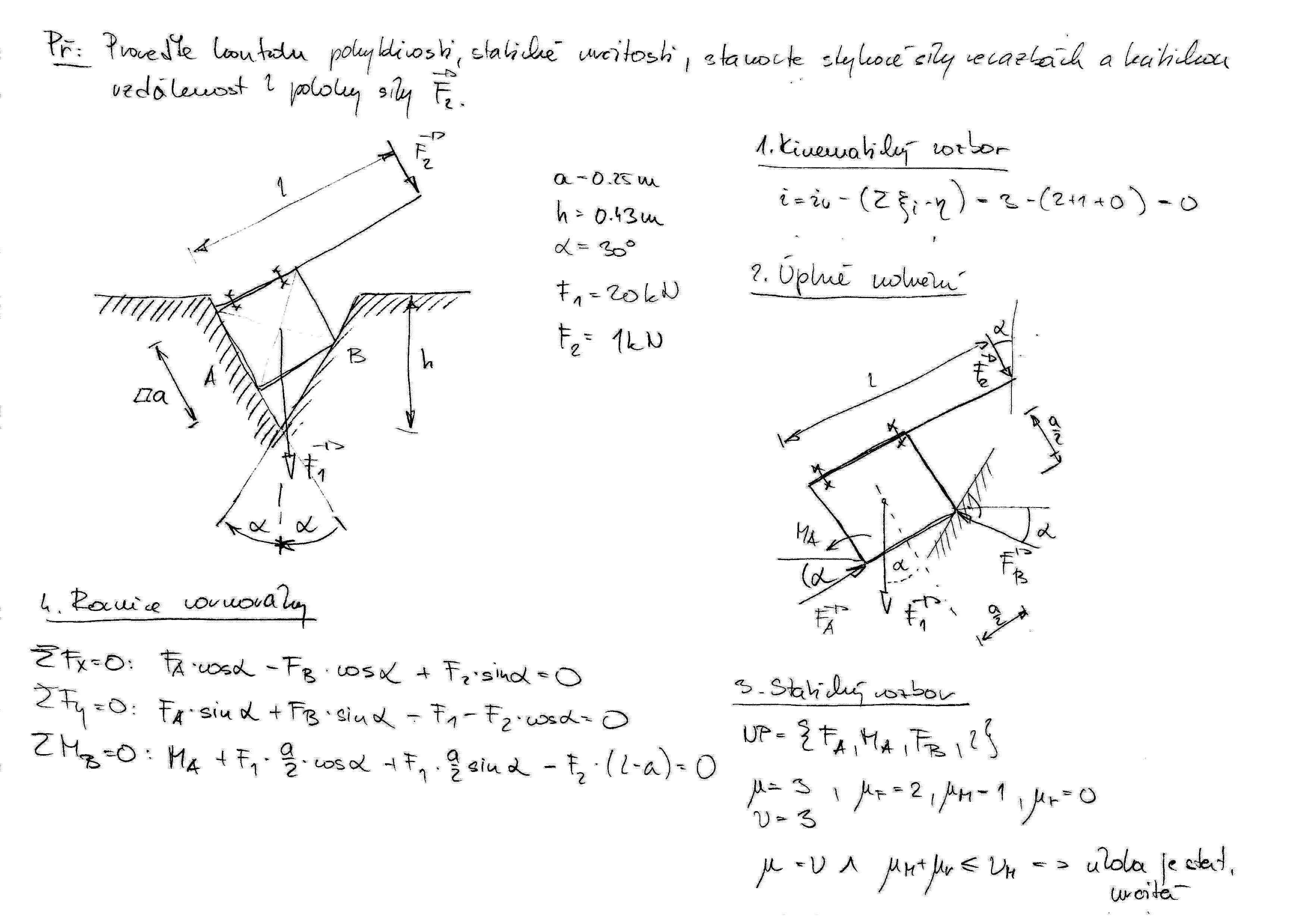
Cvičení 6: Vázané těleso.
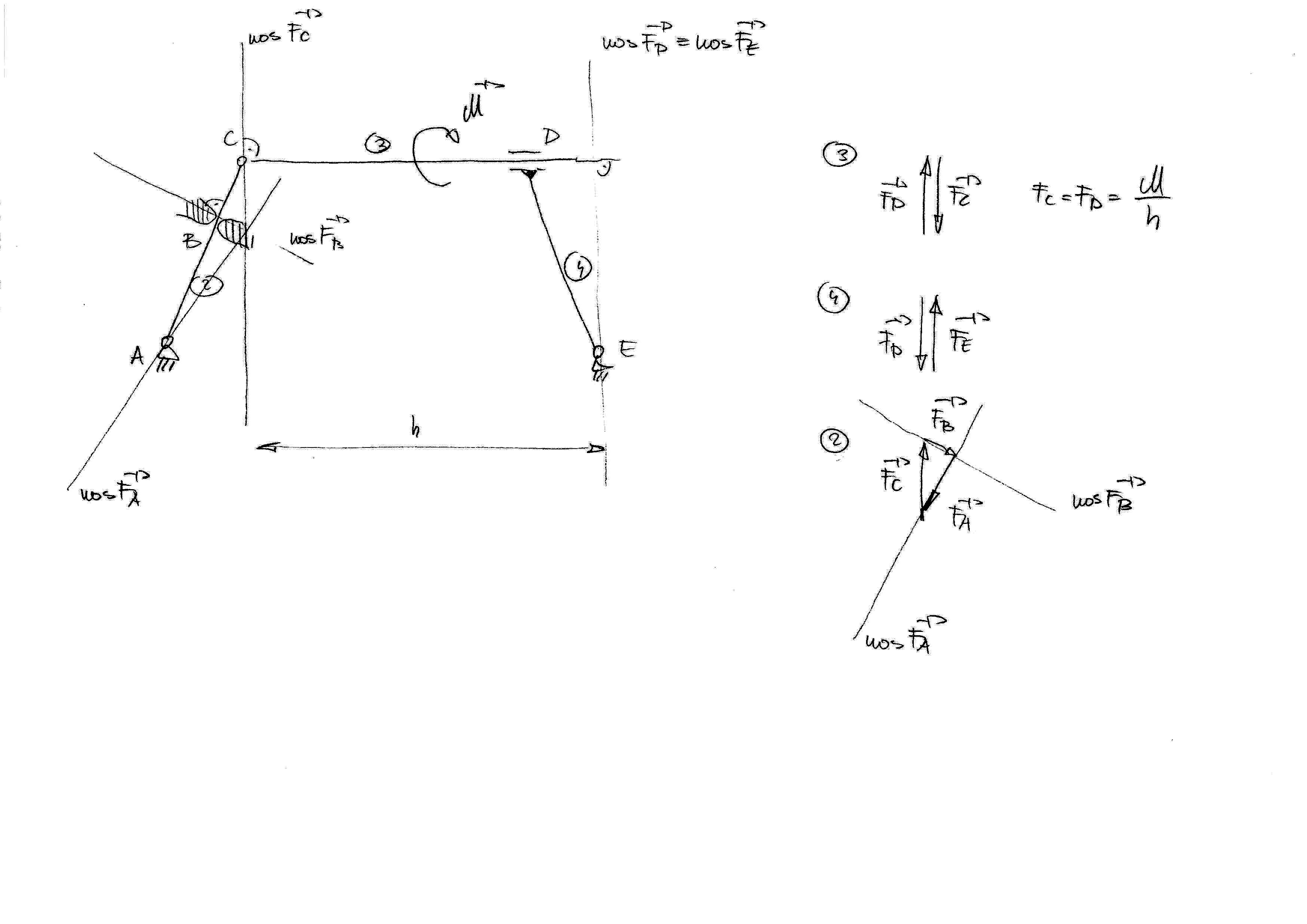
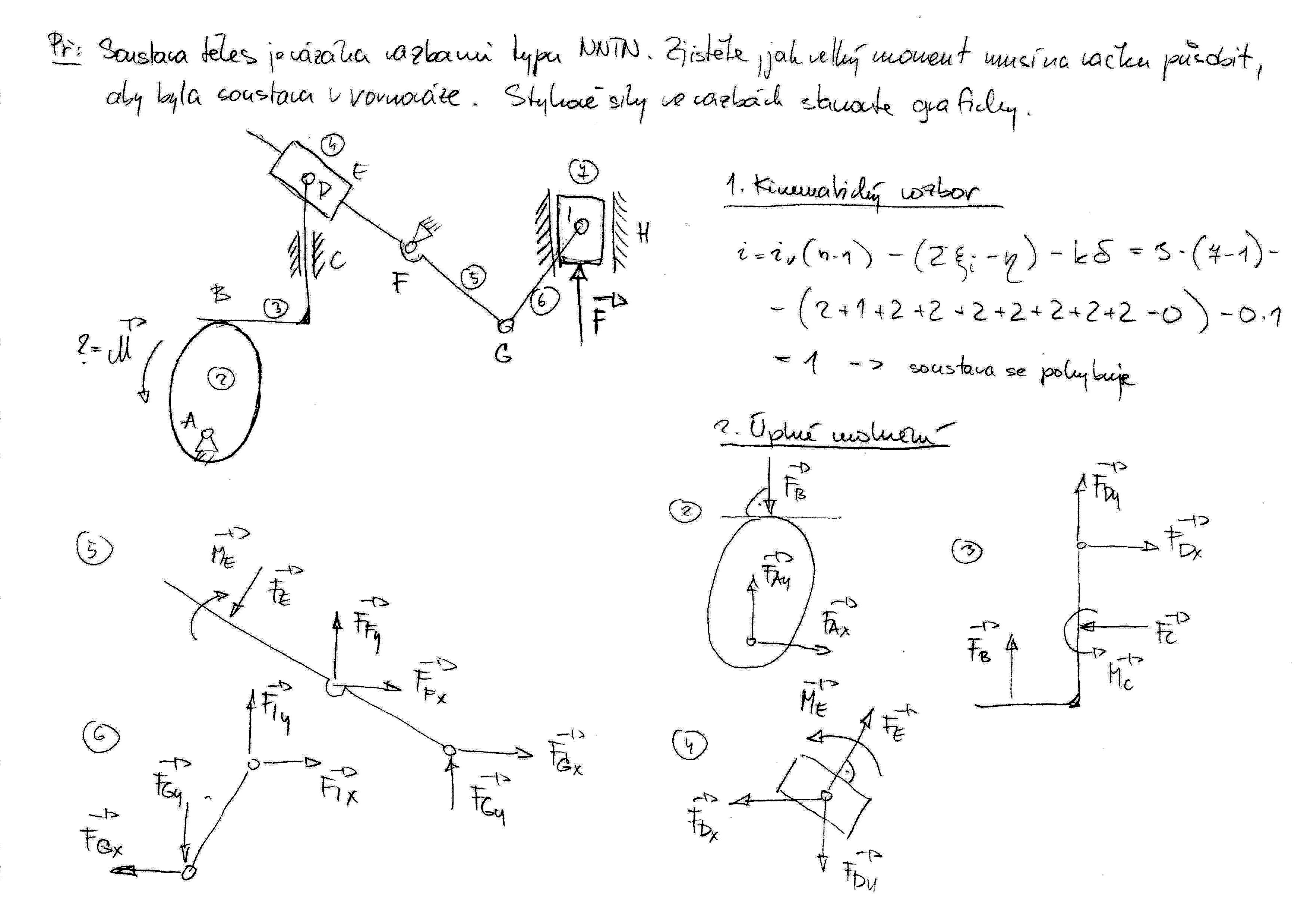
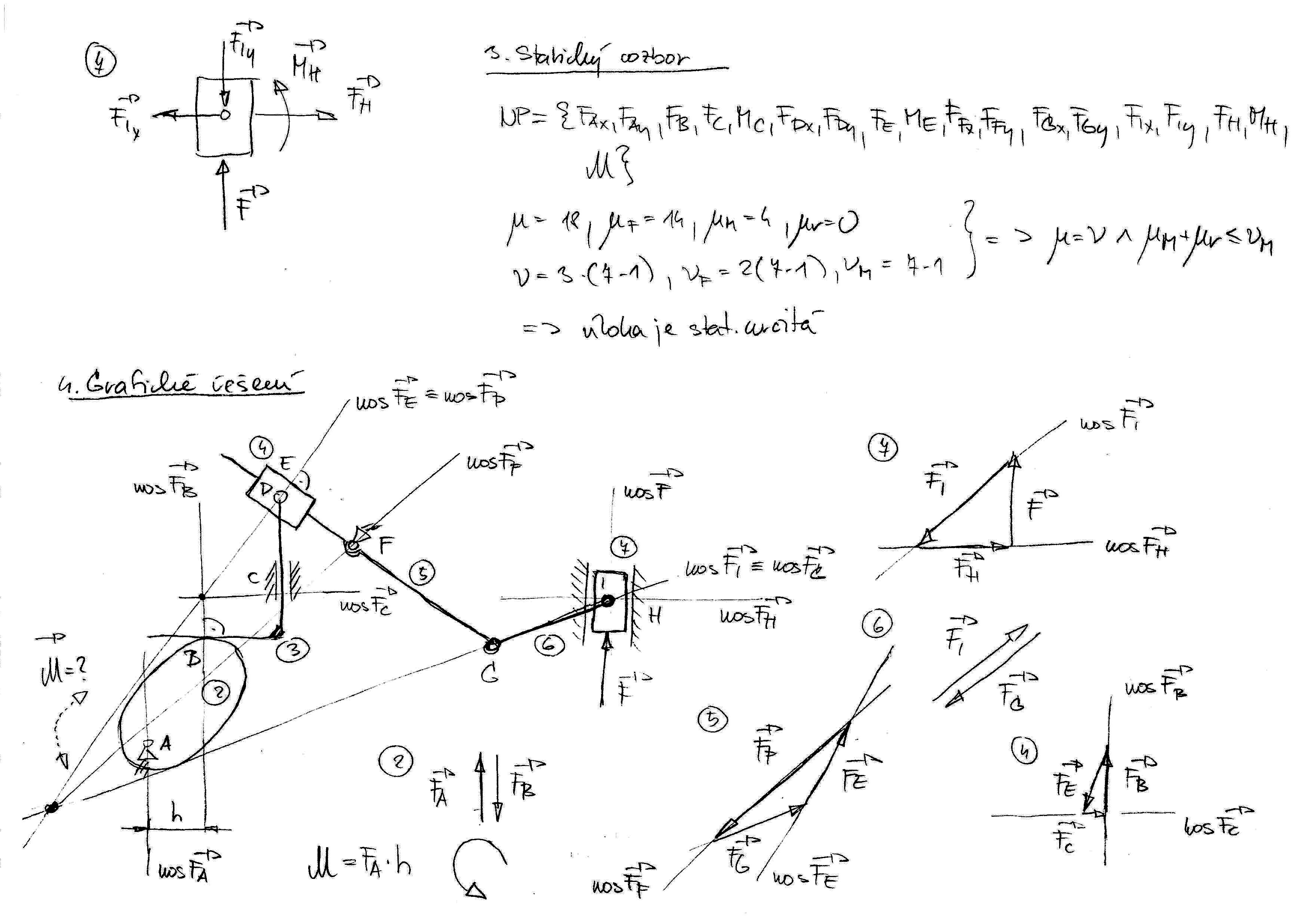
Cvičení 7: Vázané těleso, soustava těles.
Cvičení 8: Soustava těles.
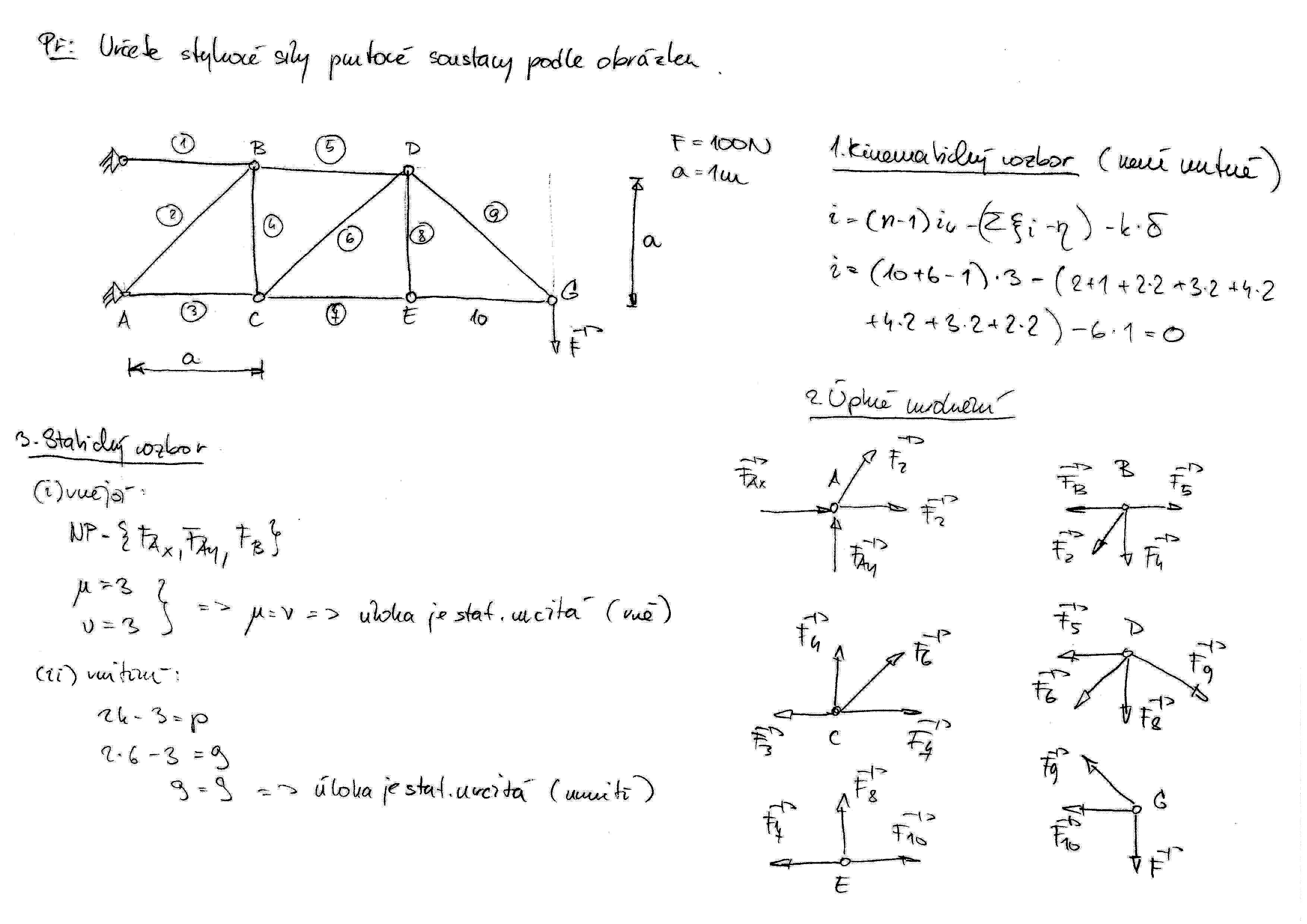
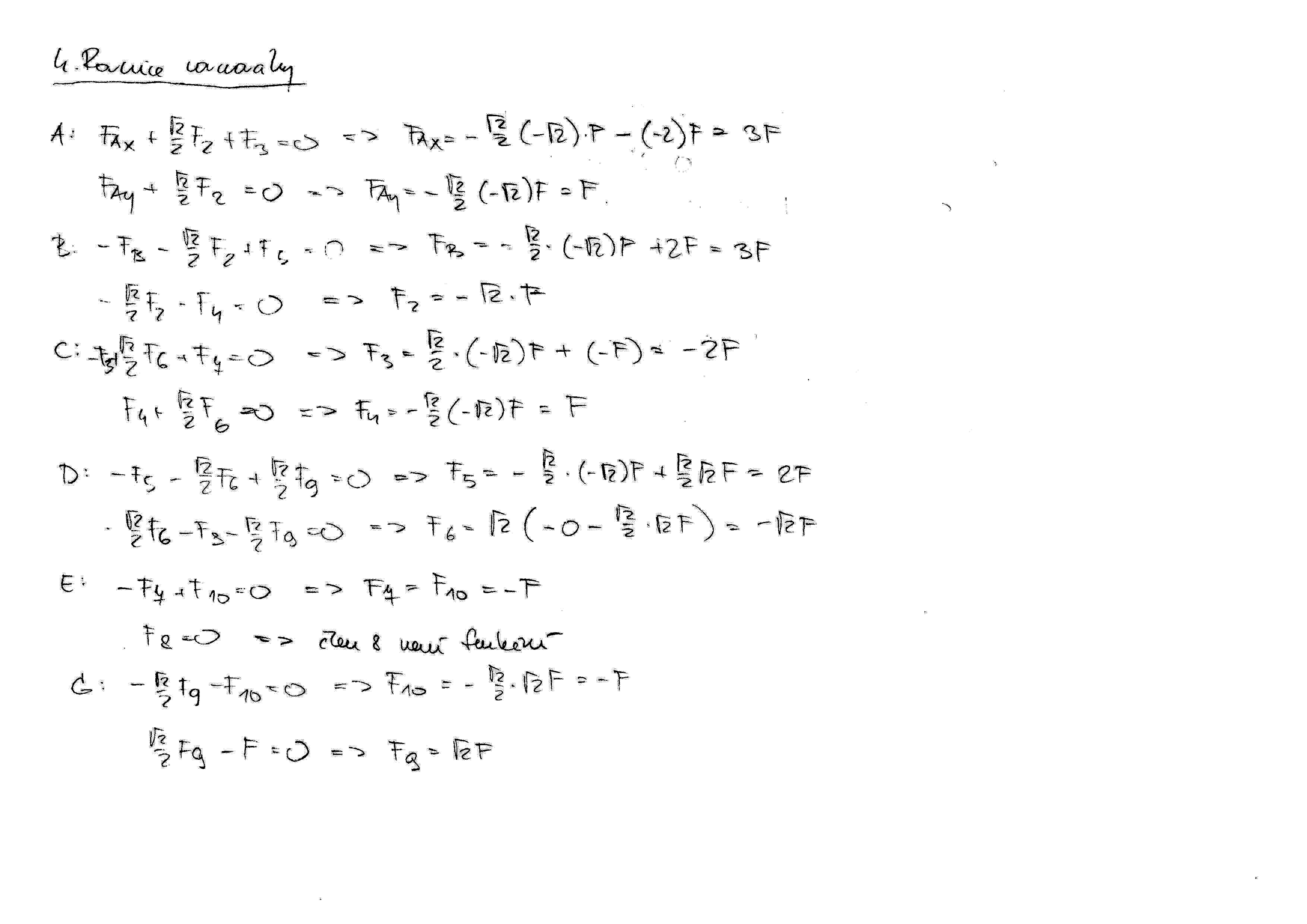
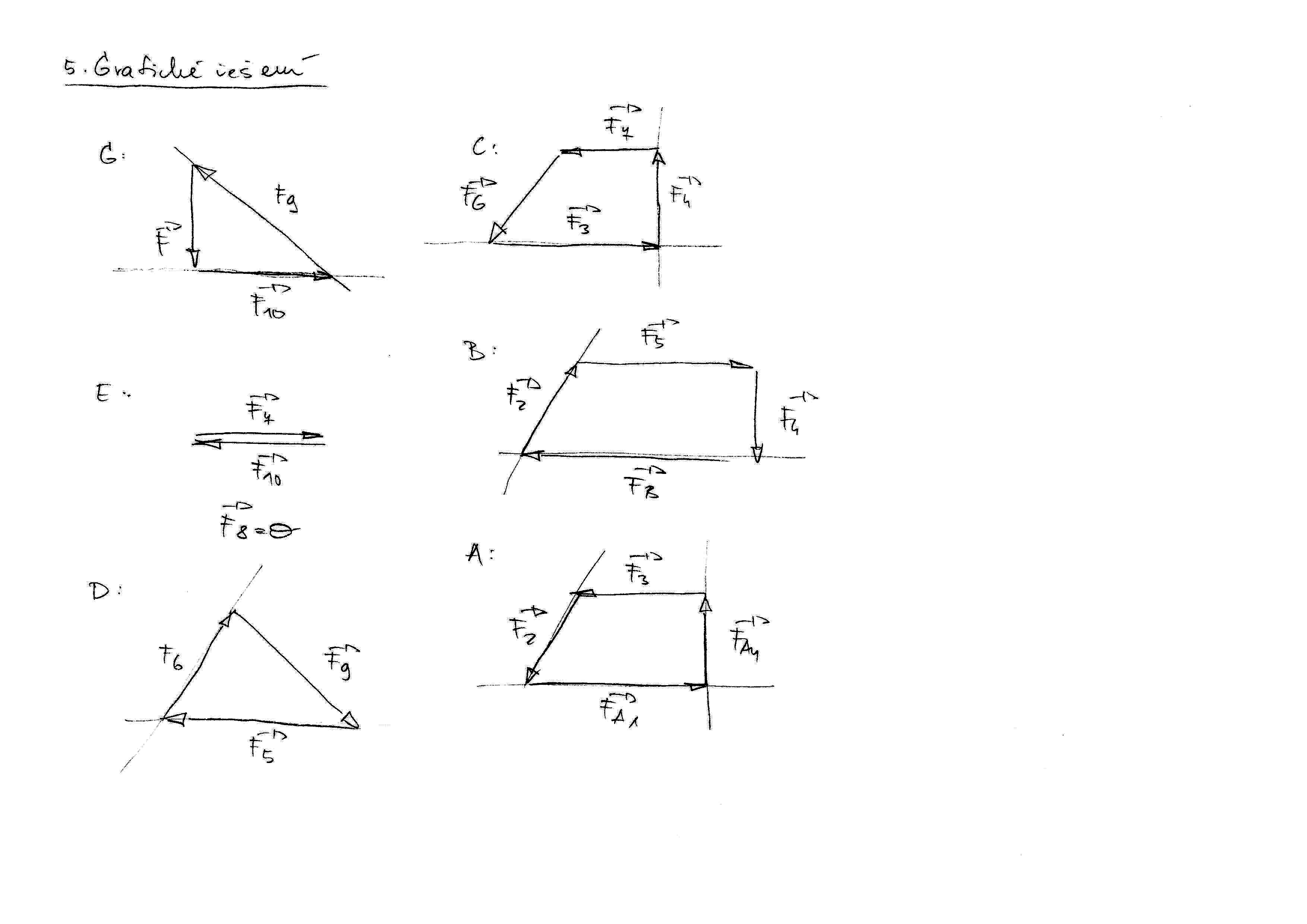
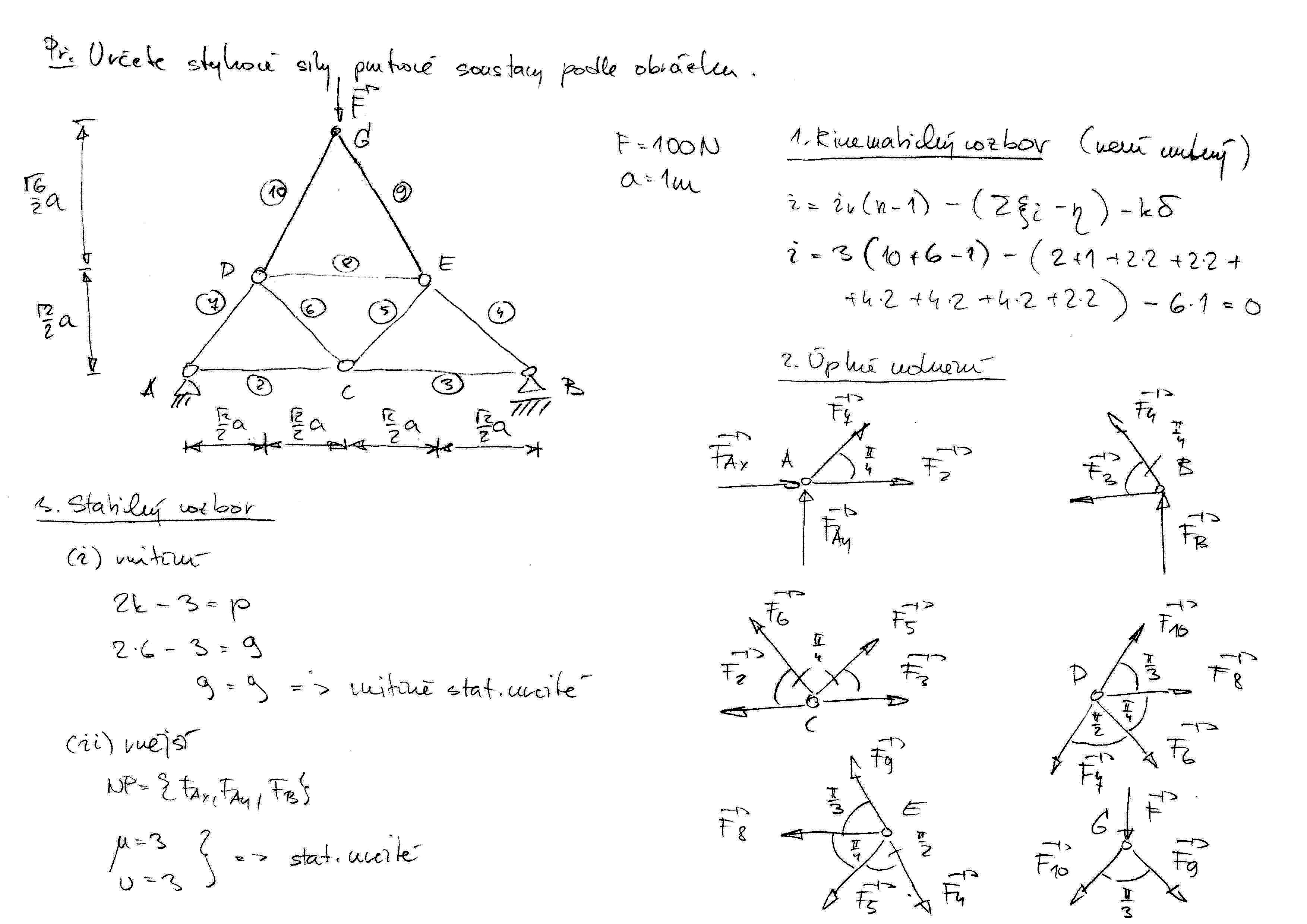
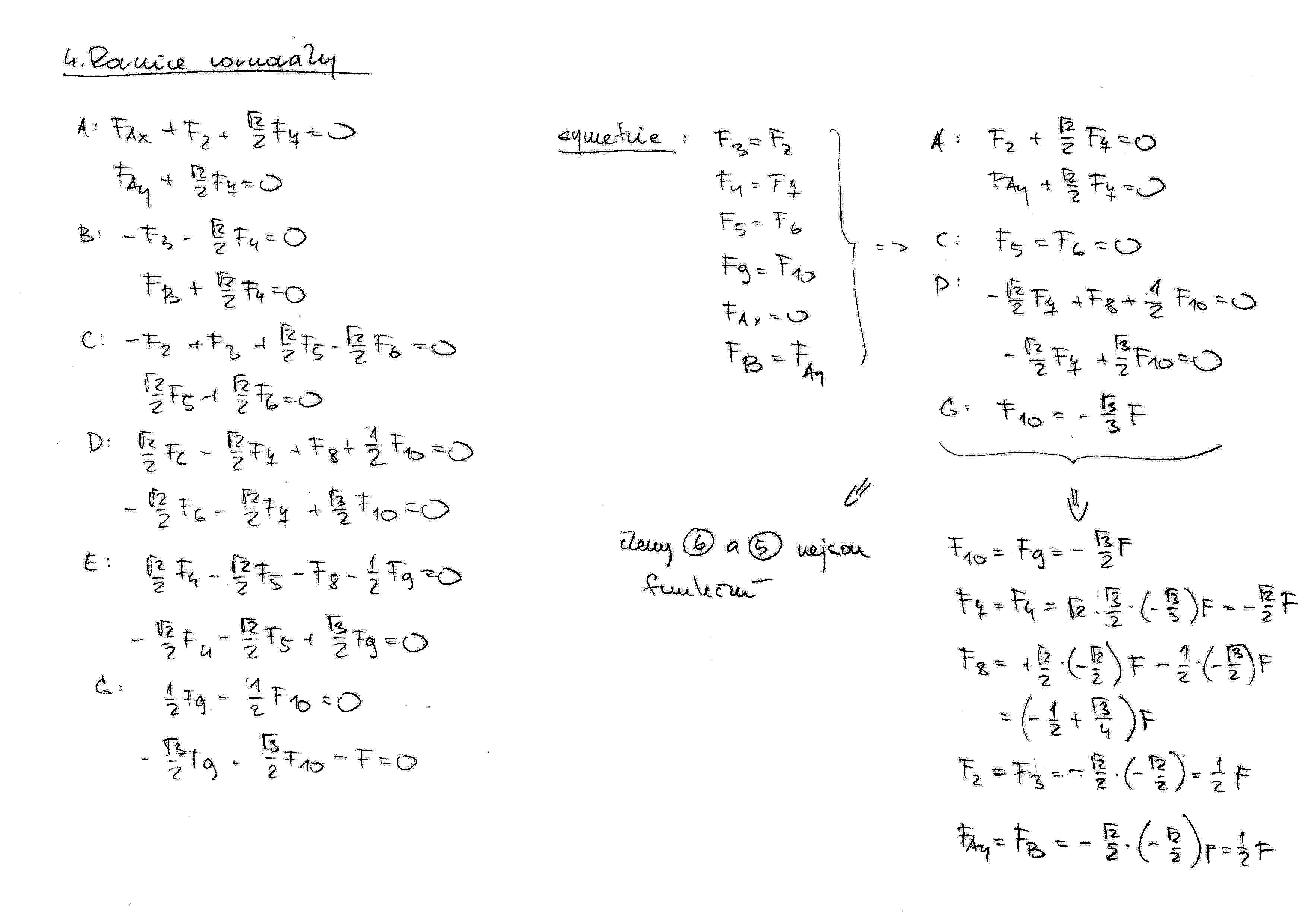
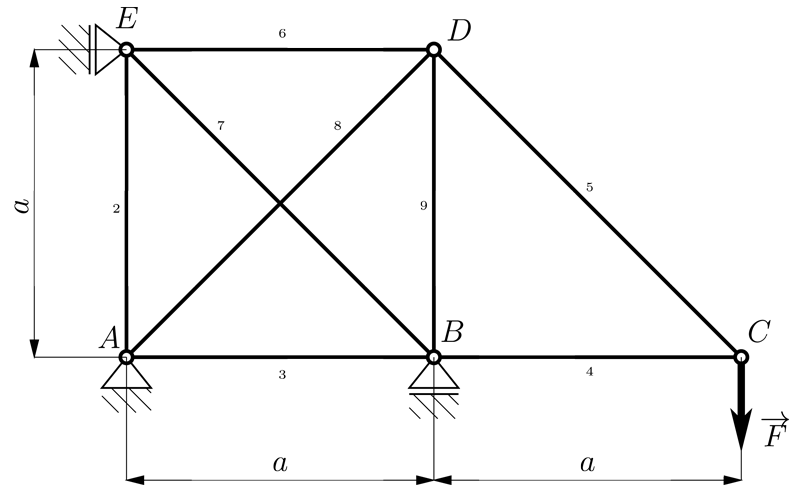
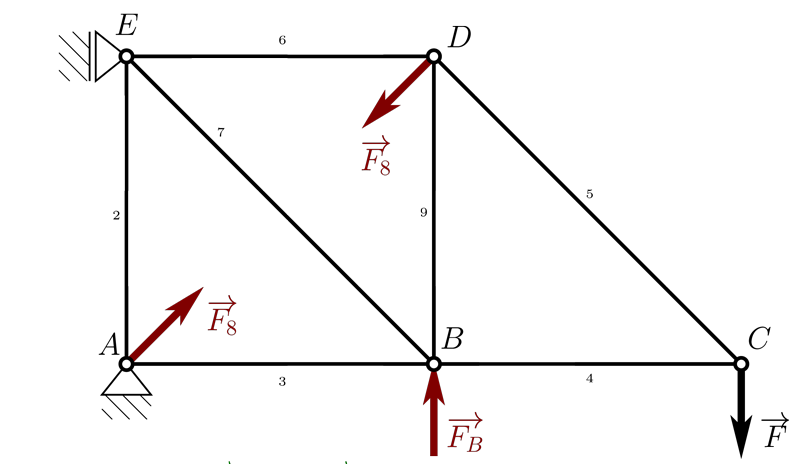
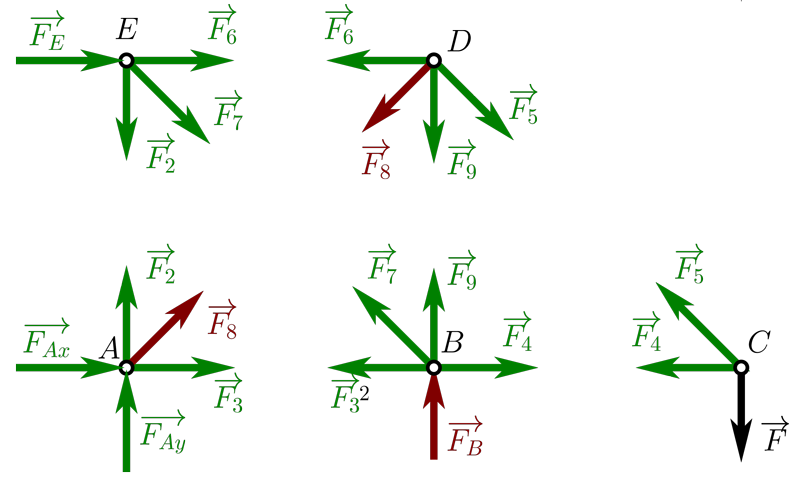
Cvičení 9: Prutová soustava
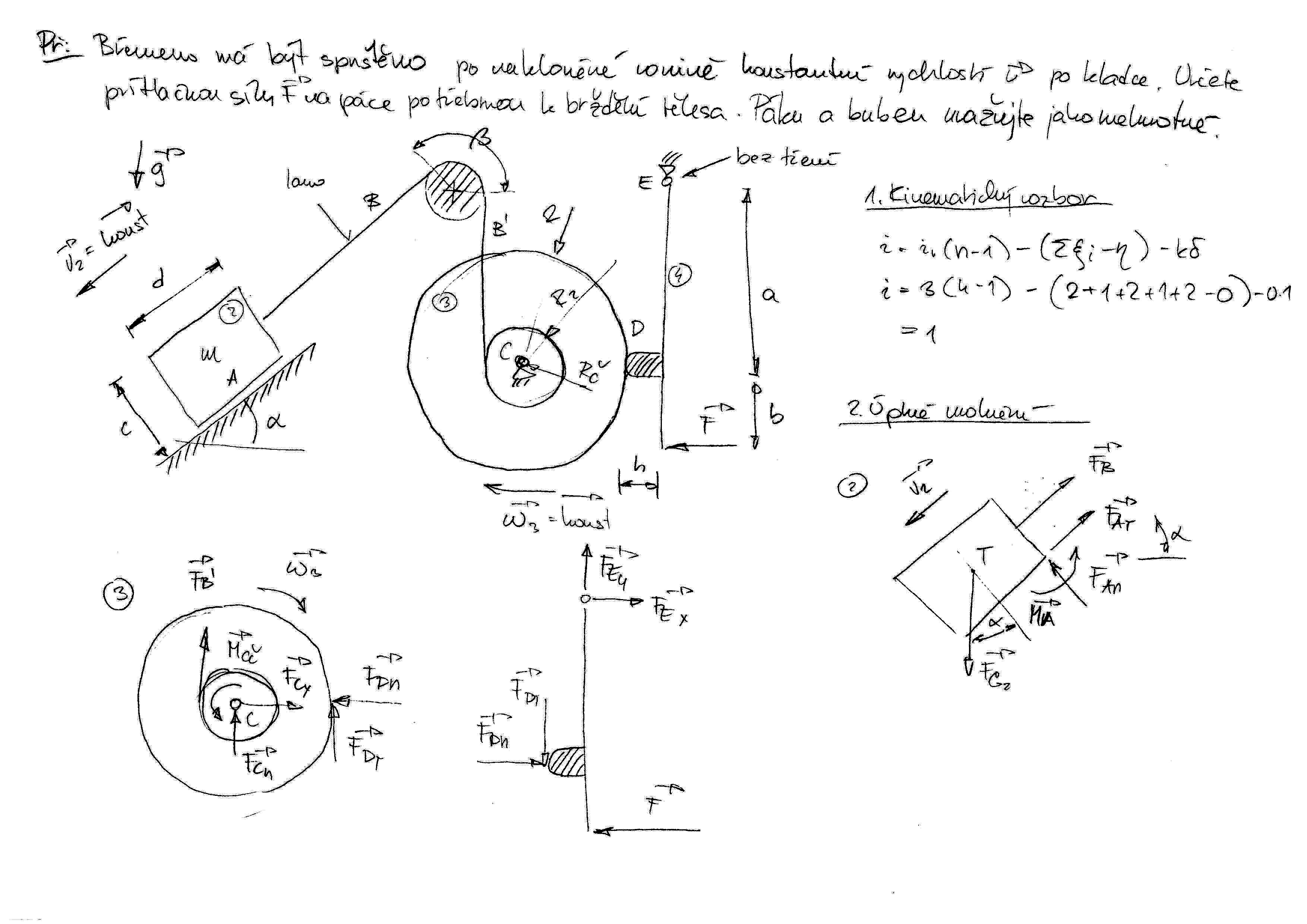
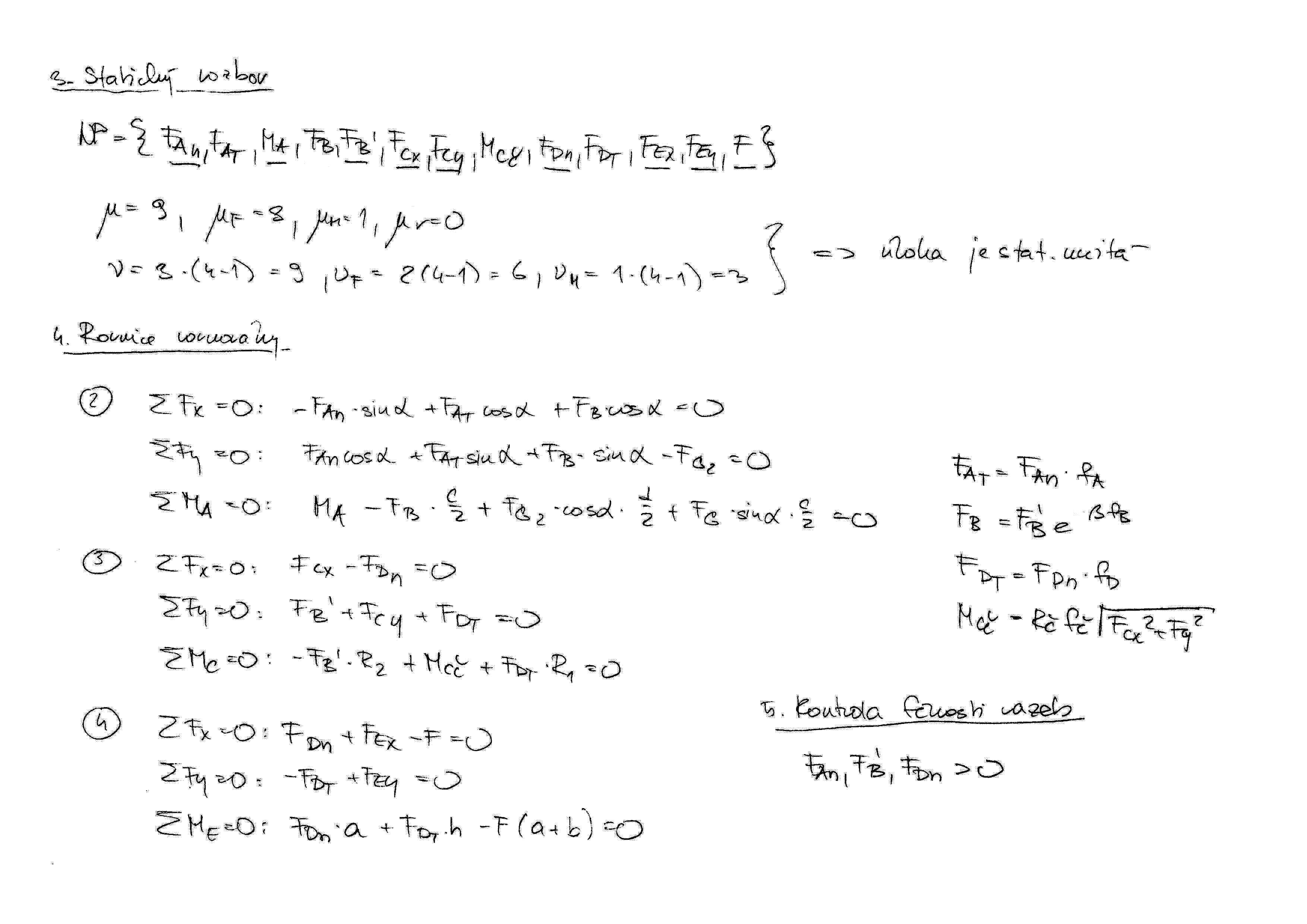
Cvičení 10: Pasívní účinky
Cvičení 11: Pasívní účinky
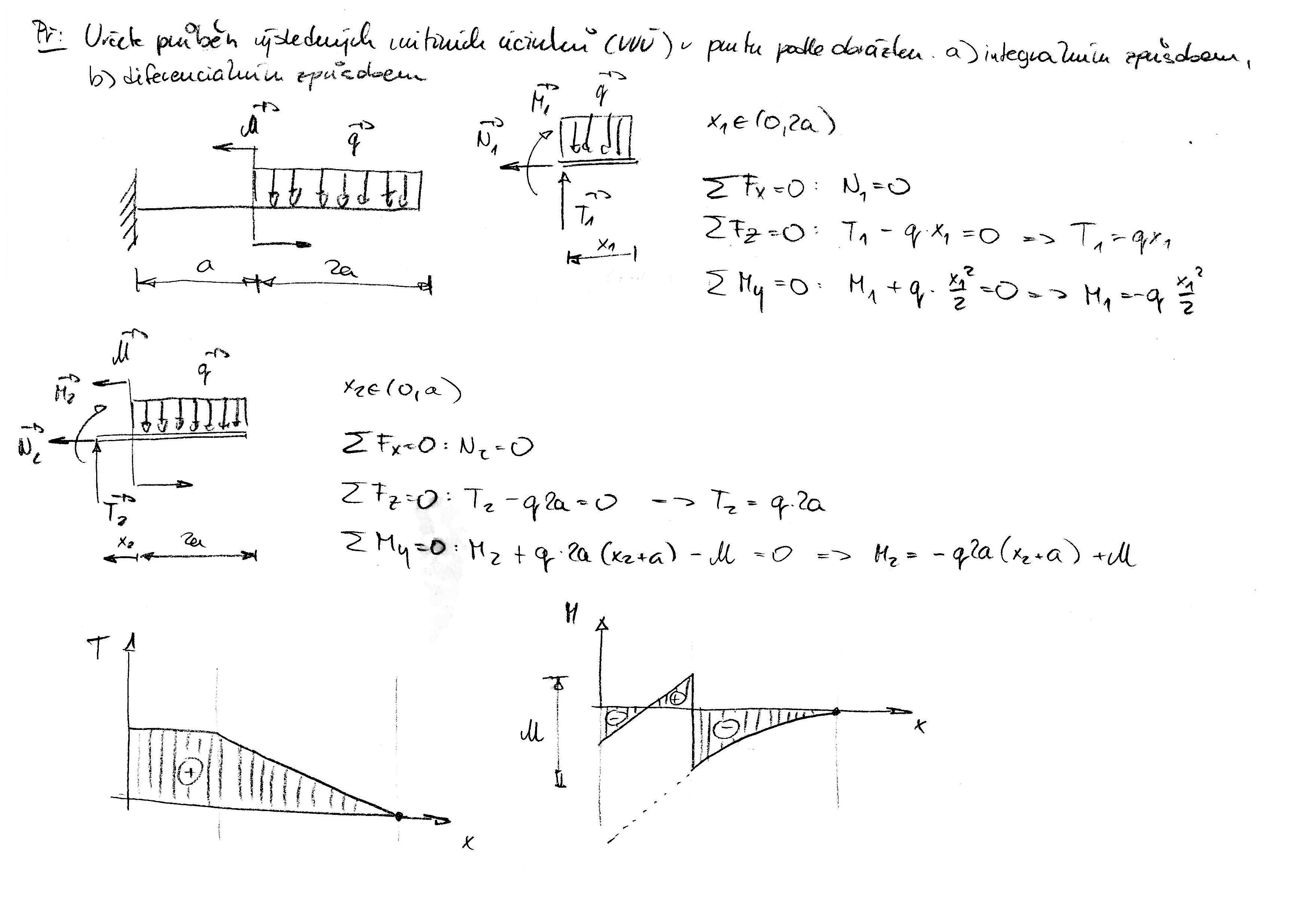
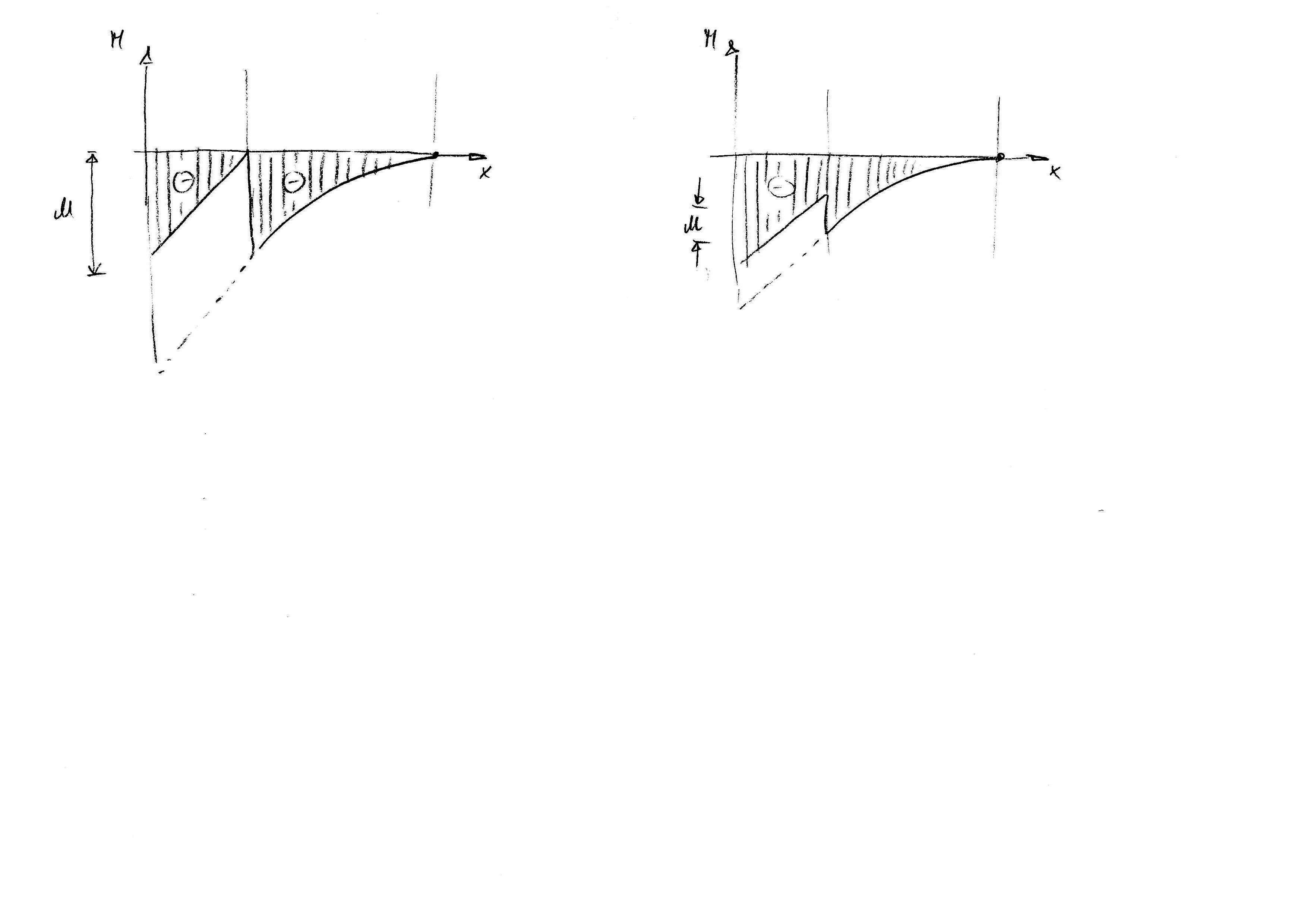
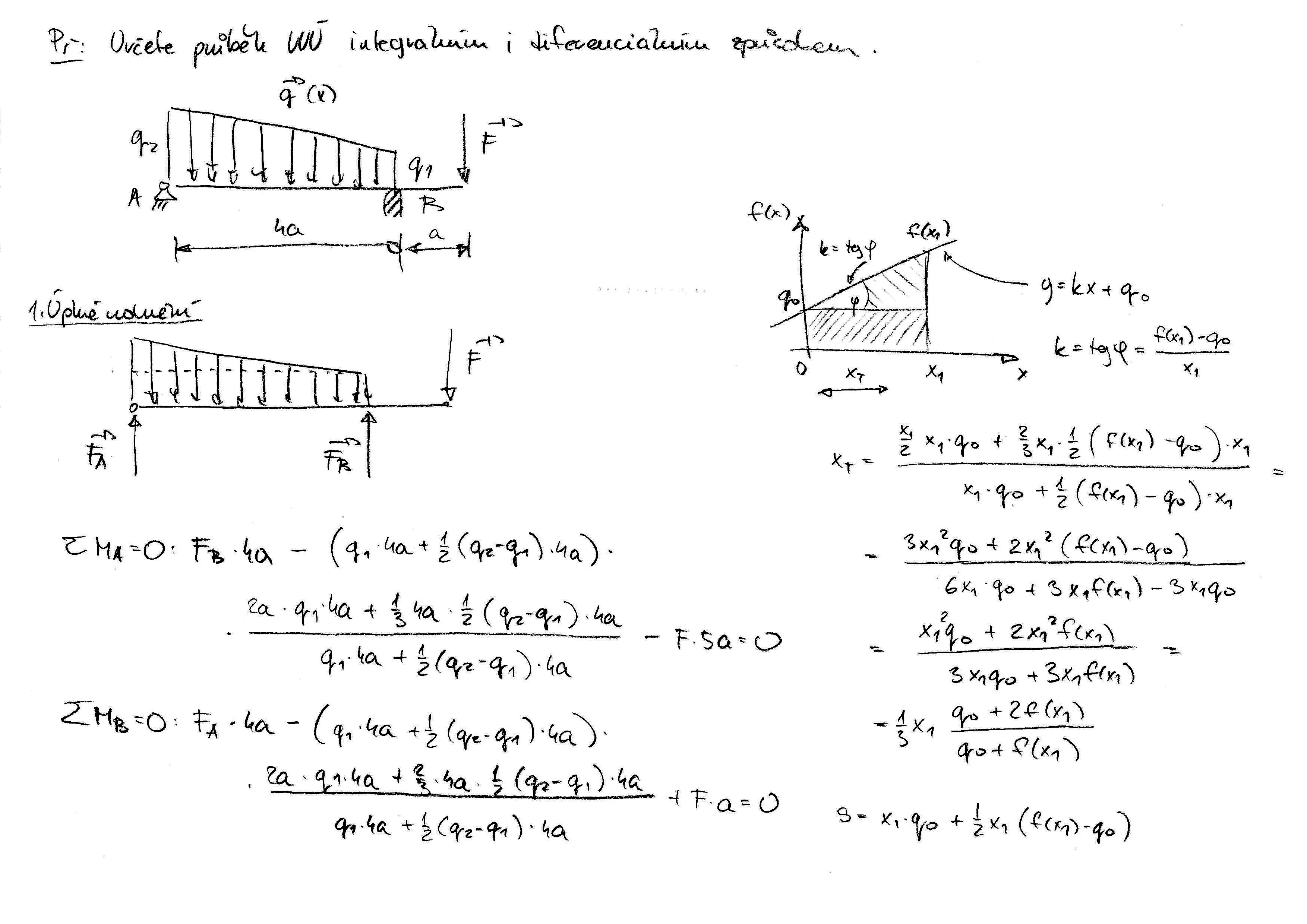
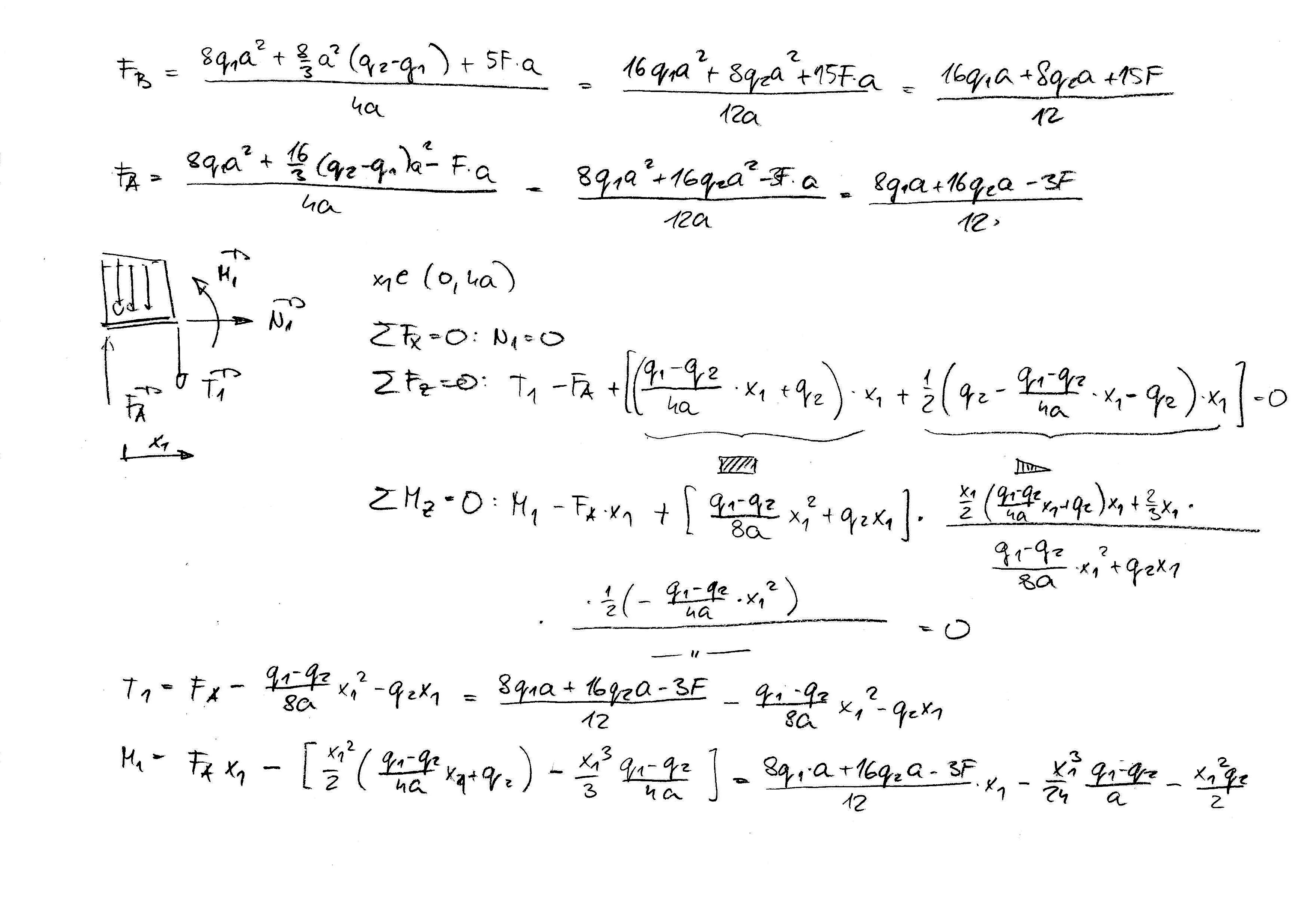
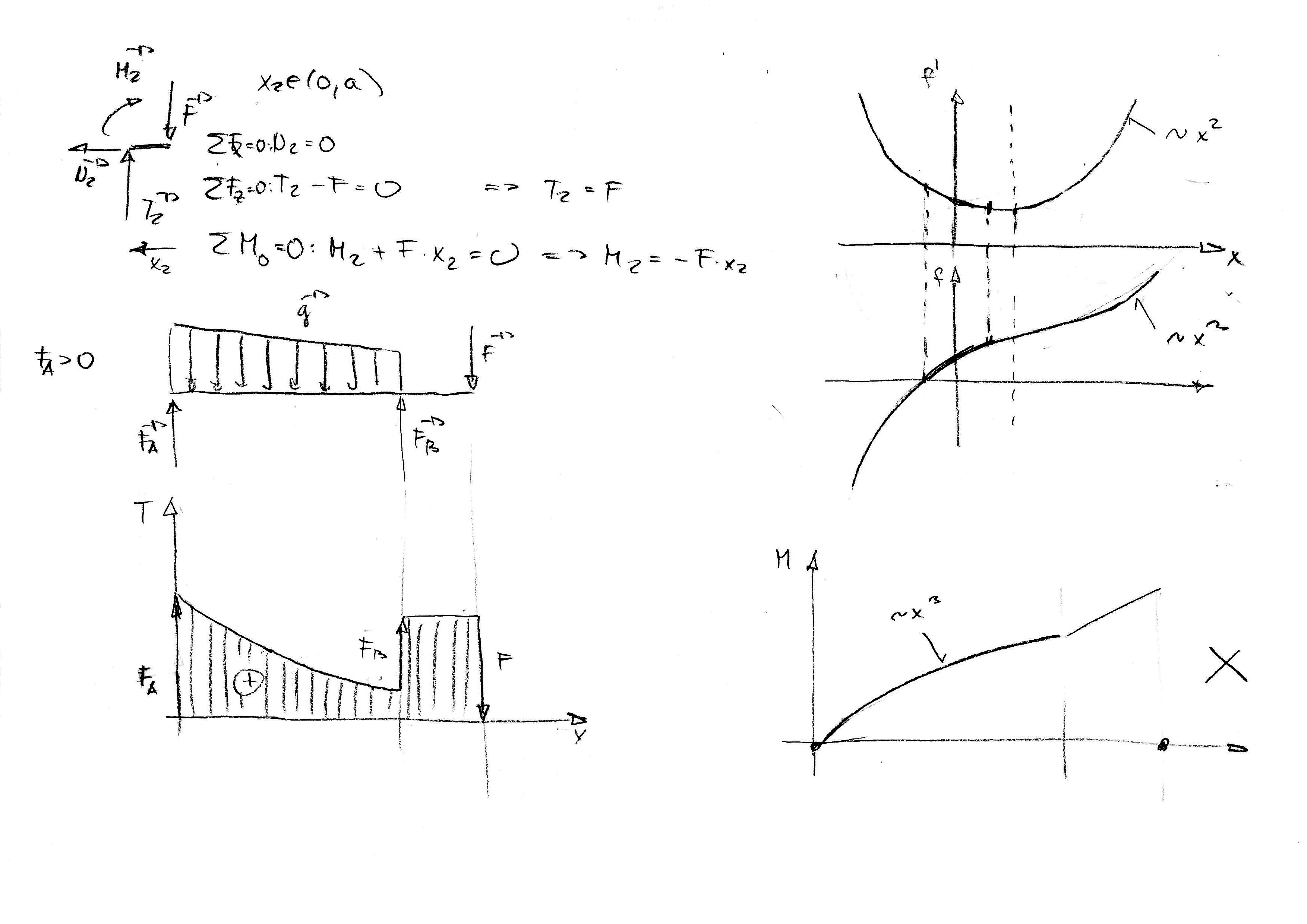
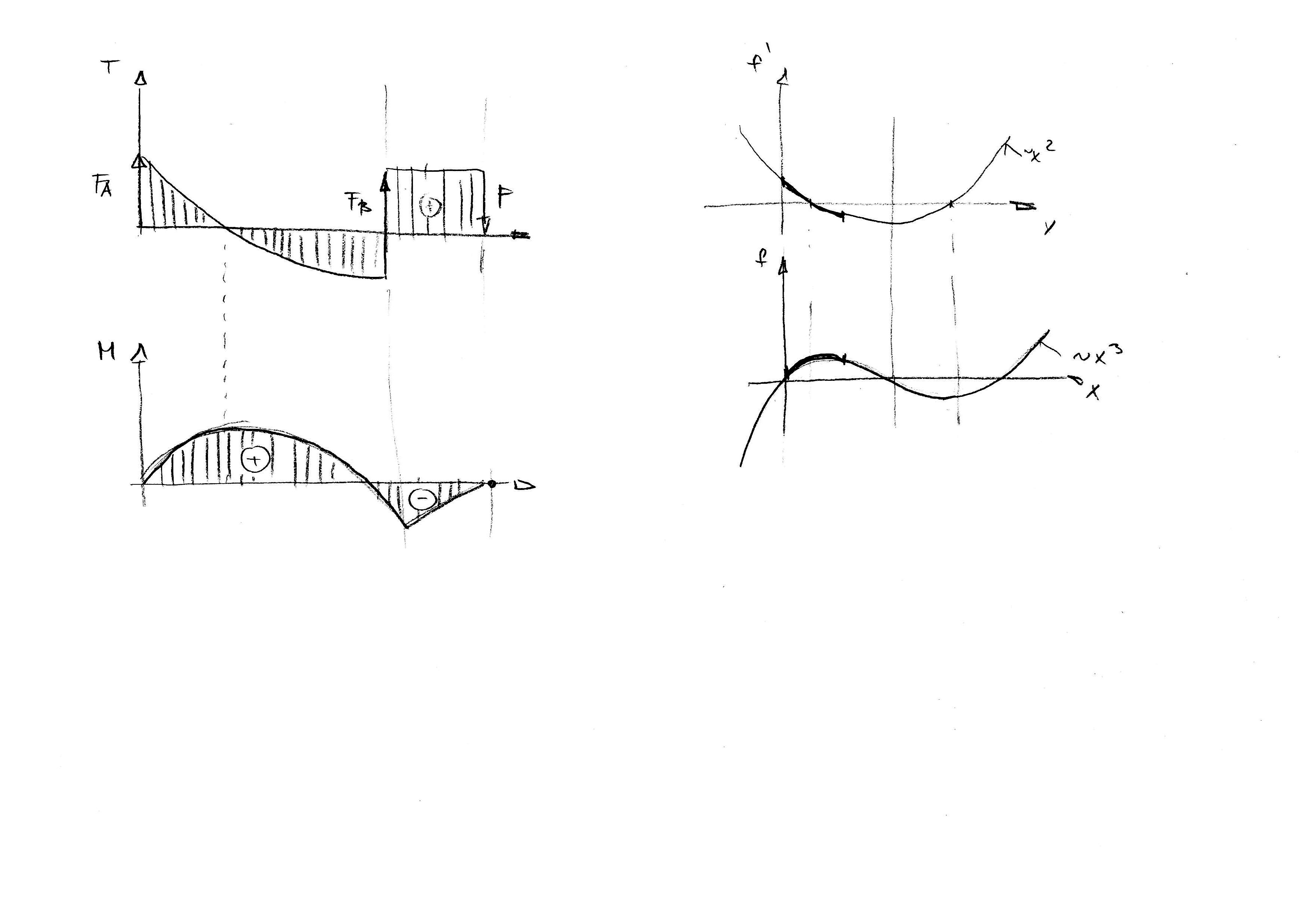
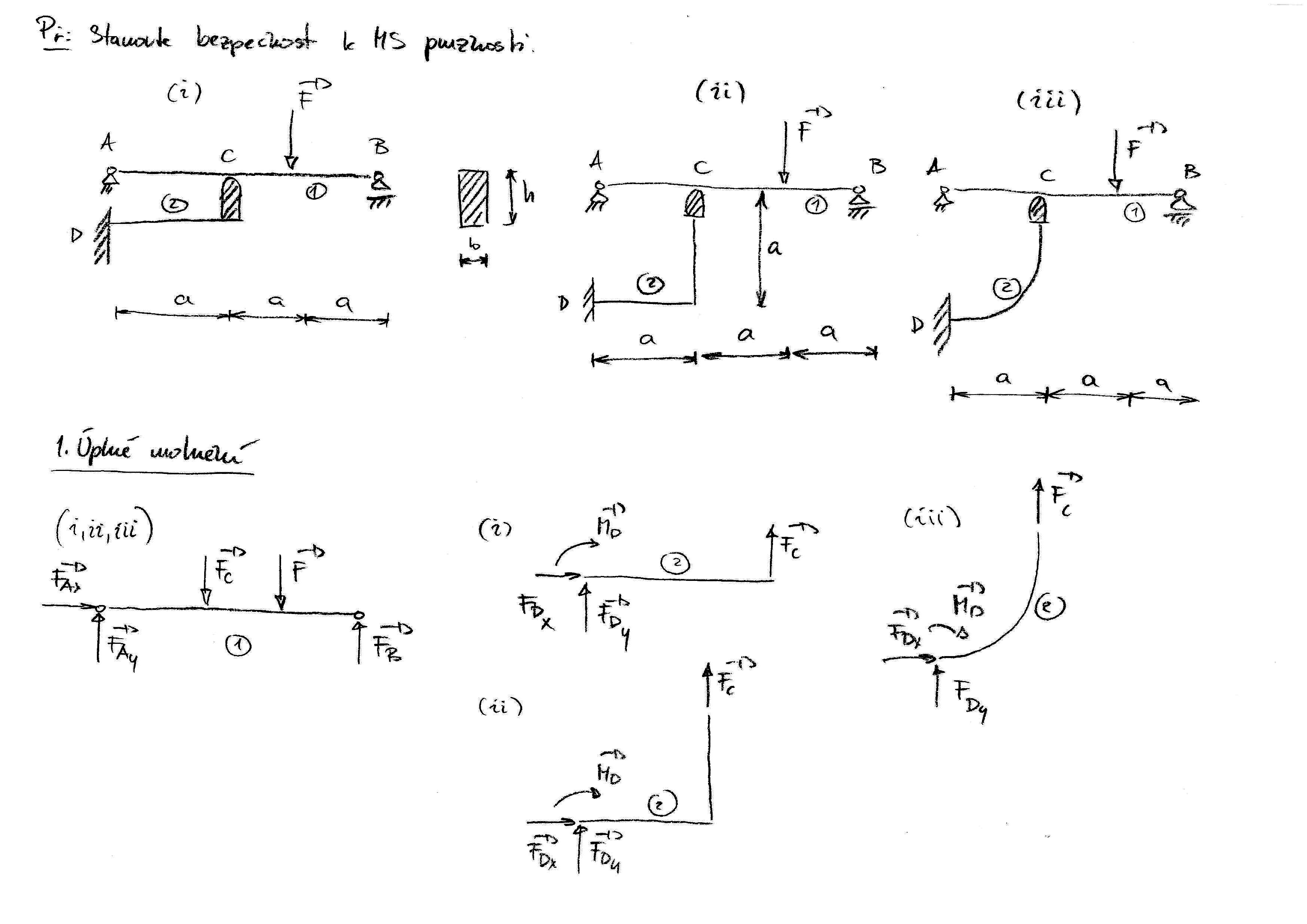
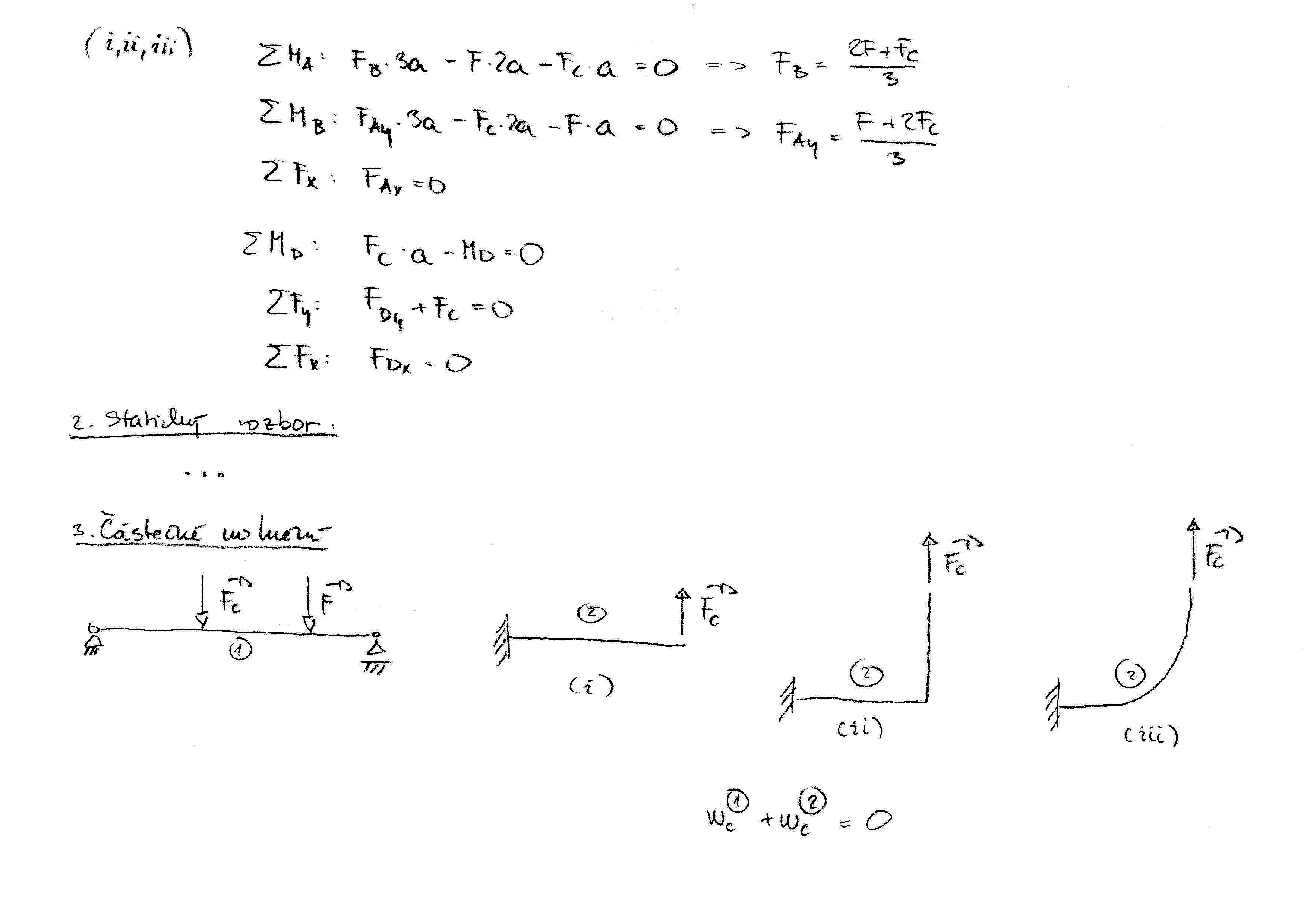
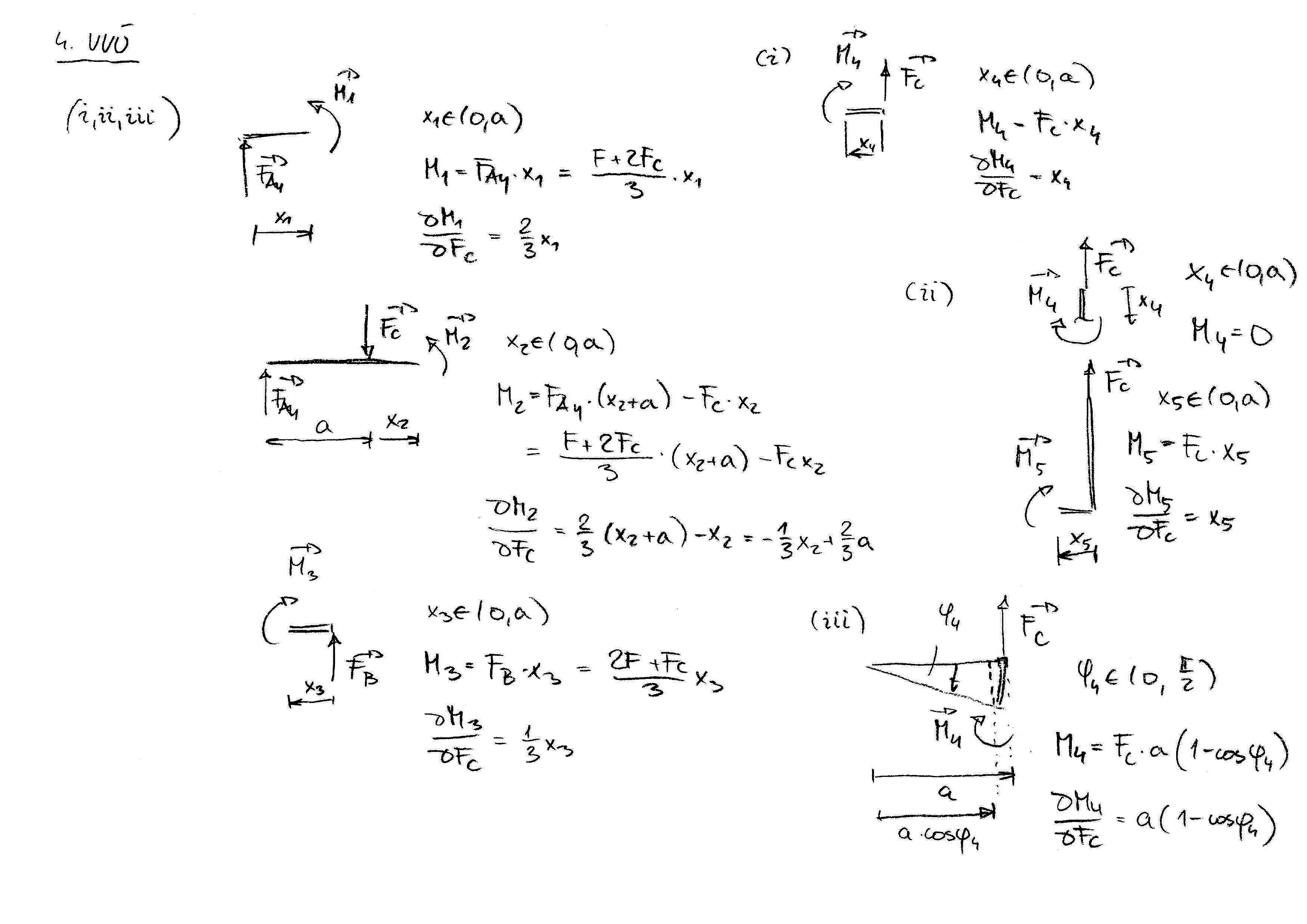
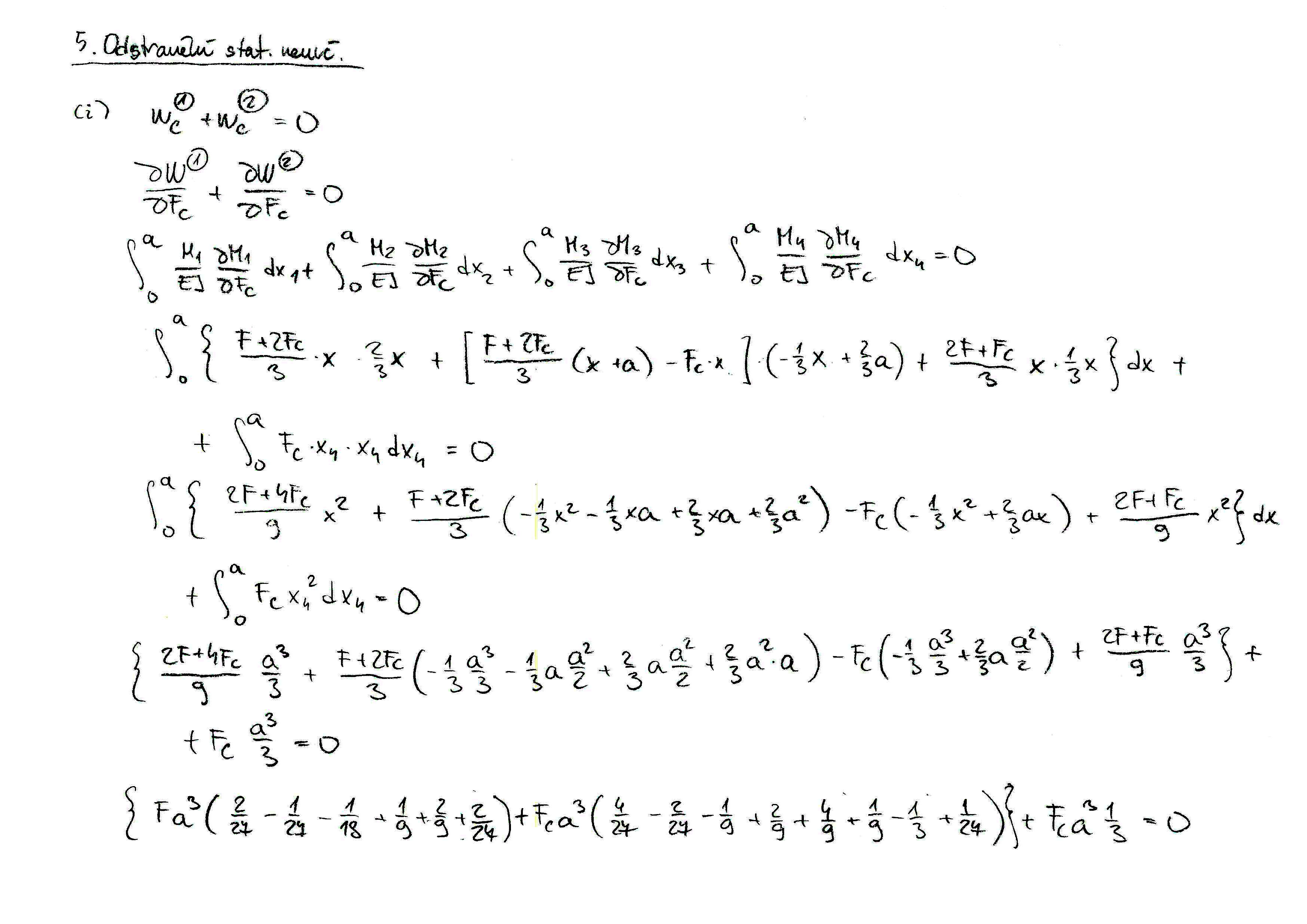
Cvičení 12: Výsledné vnitřní účinky (VVÚ)
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Pružnost a pevnost I¶
Ukázkové příklady k procvičení jsou ve formátu *.ipynb. Jde o soubory použitelné v systému Jupyter, který si můžete stáhnout na stránkách jupyter.org pro případ Pythonu nebo otestovat na stránce juliabox.com pro případ Julie, viz také ipython.org a julialang.org.
Cvičení 1: VVÚ přímého prutu.
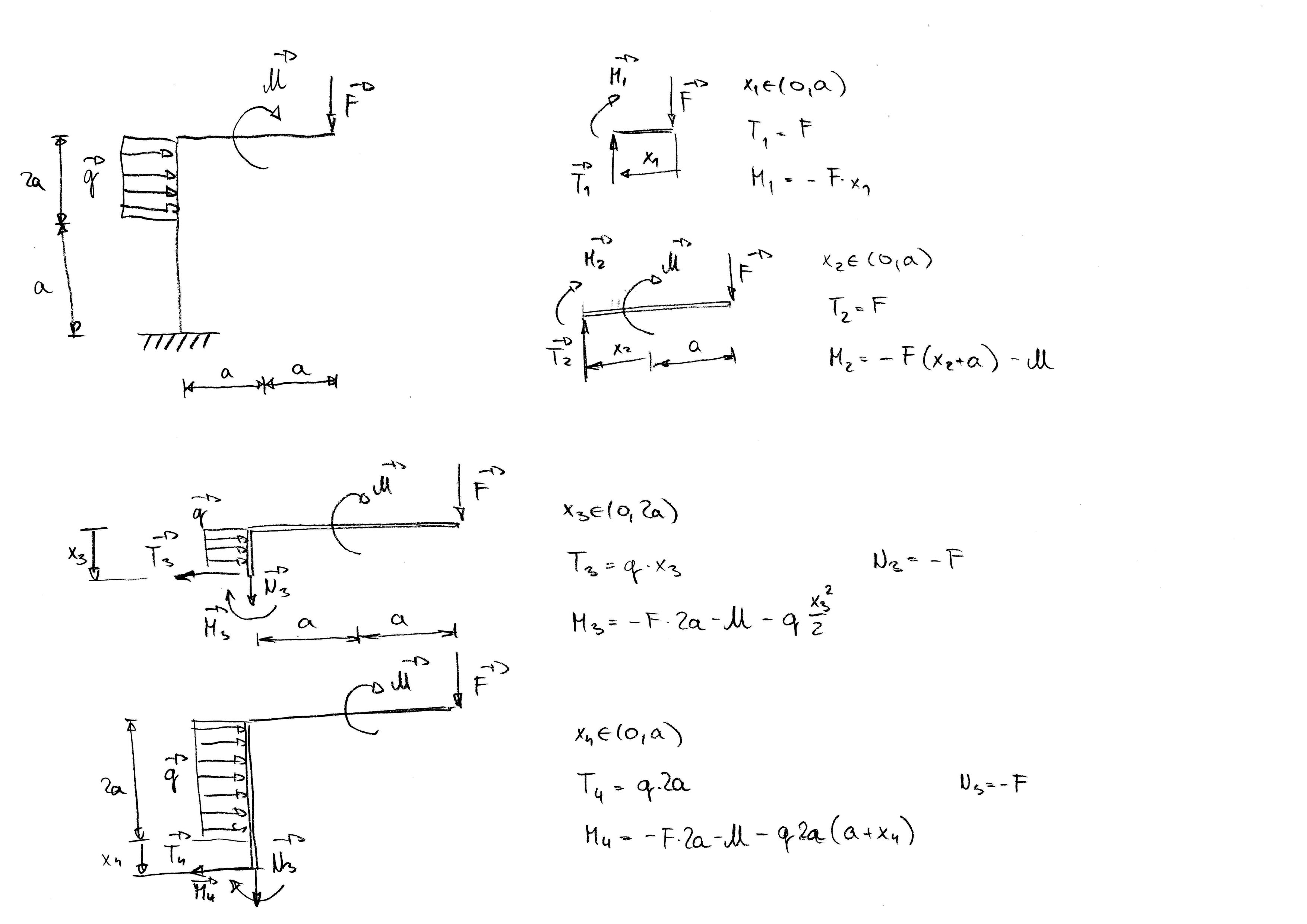
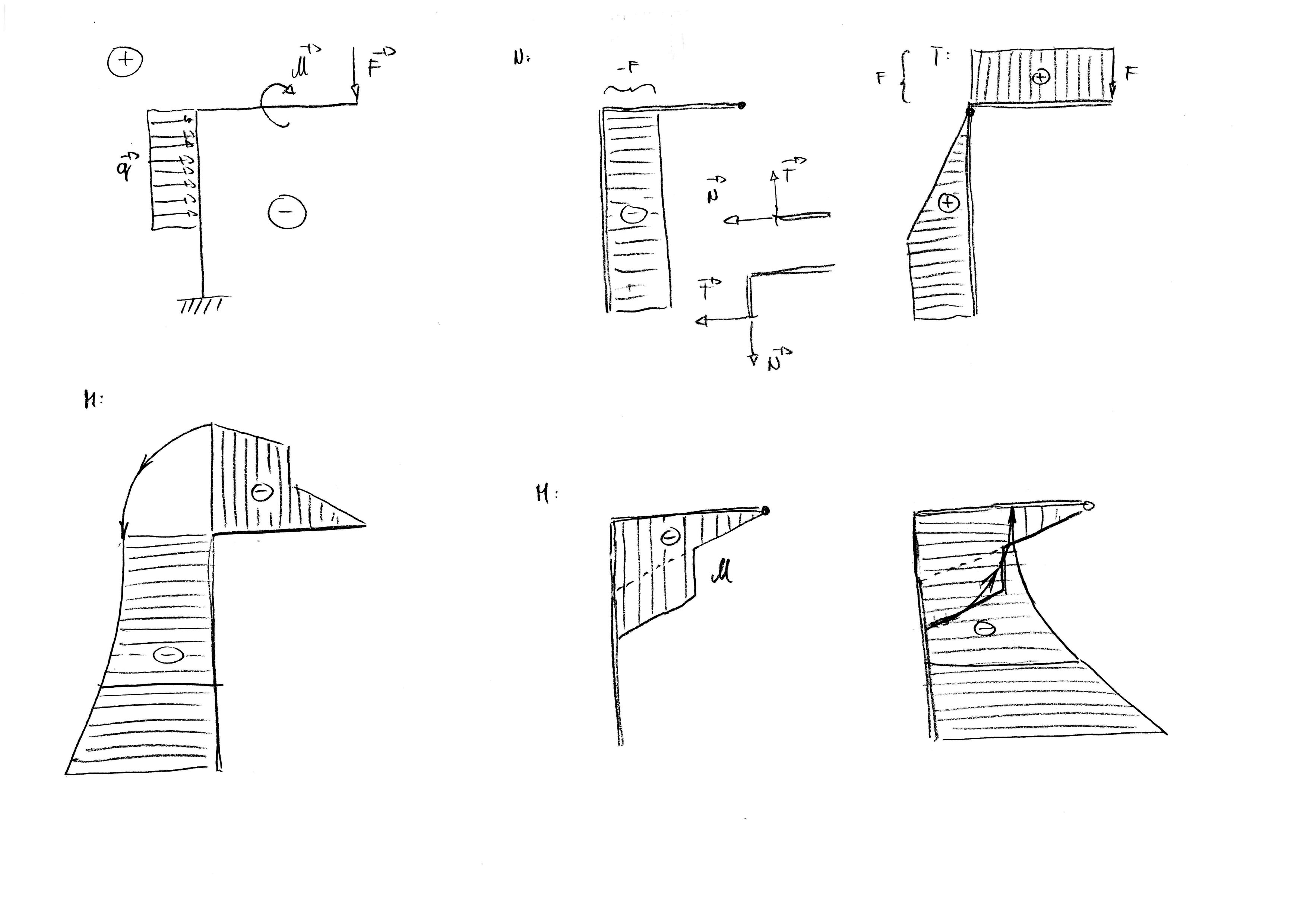
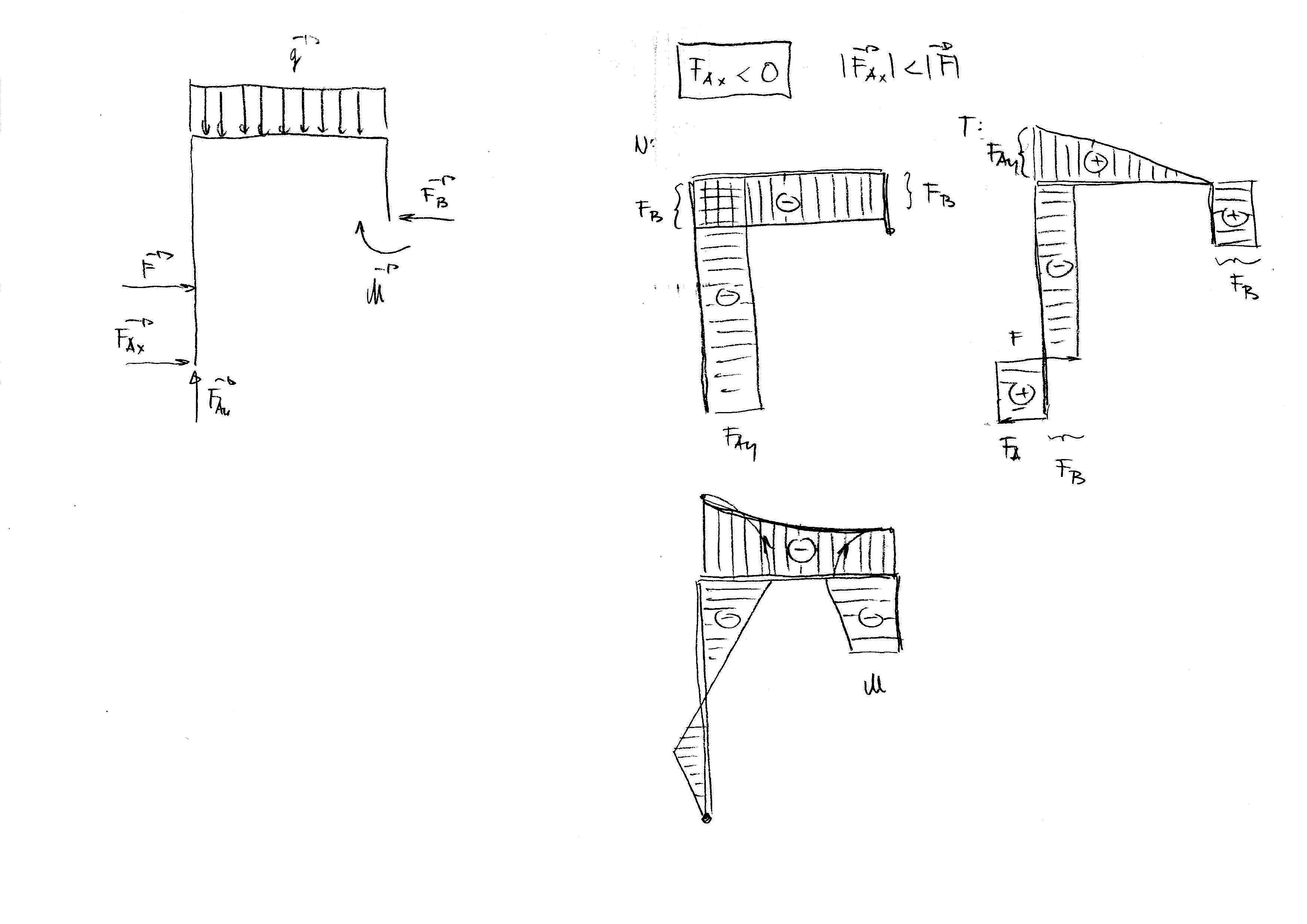
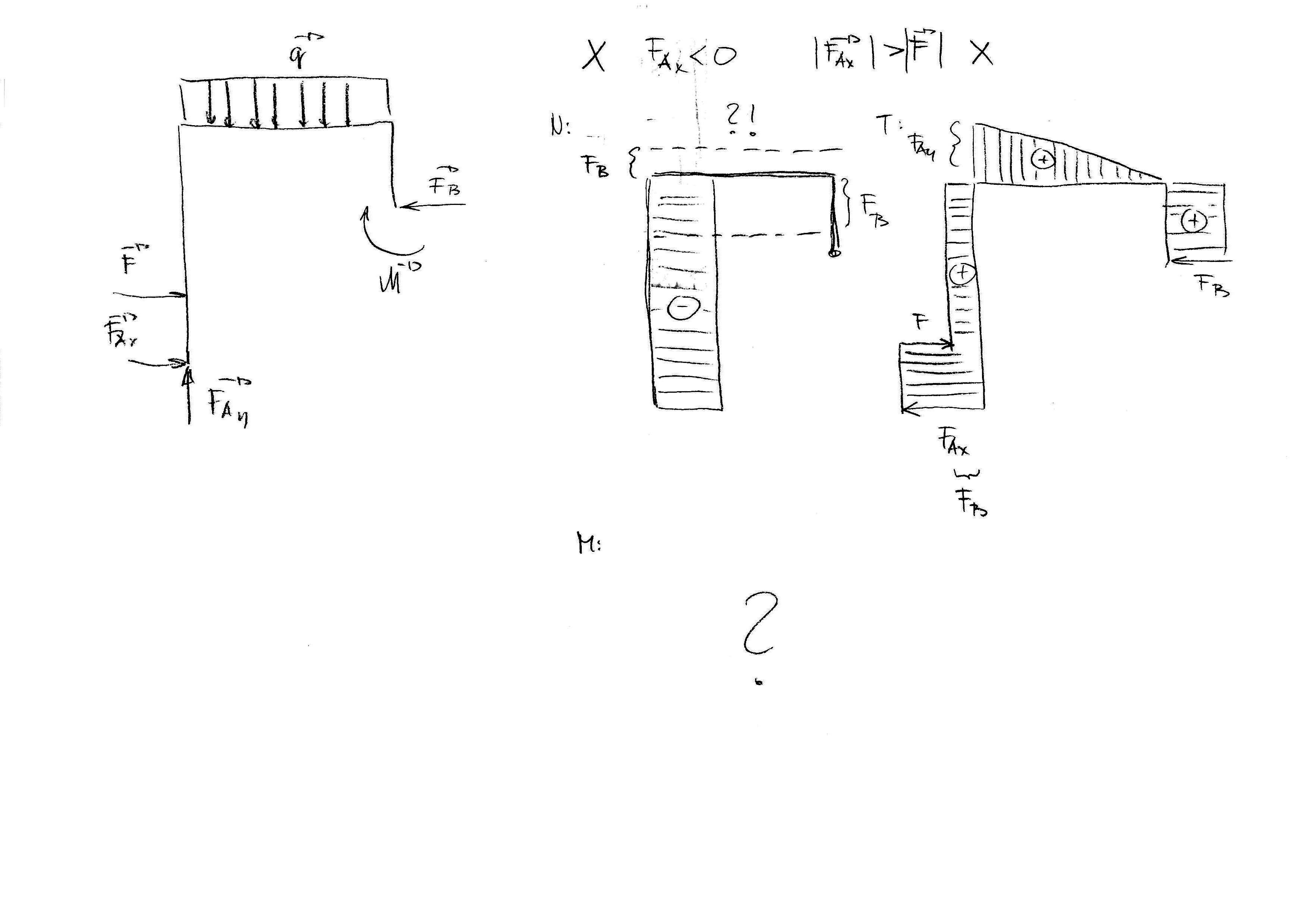
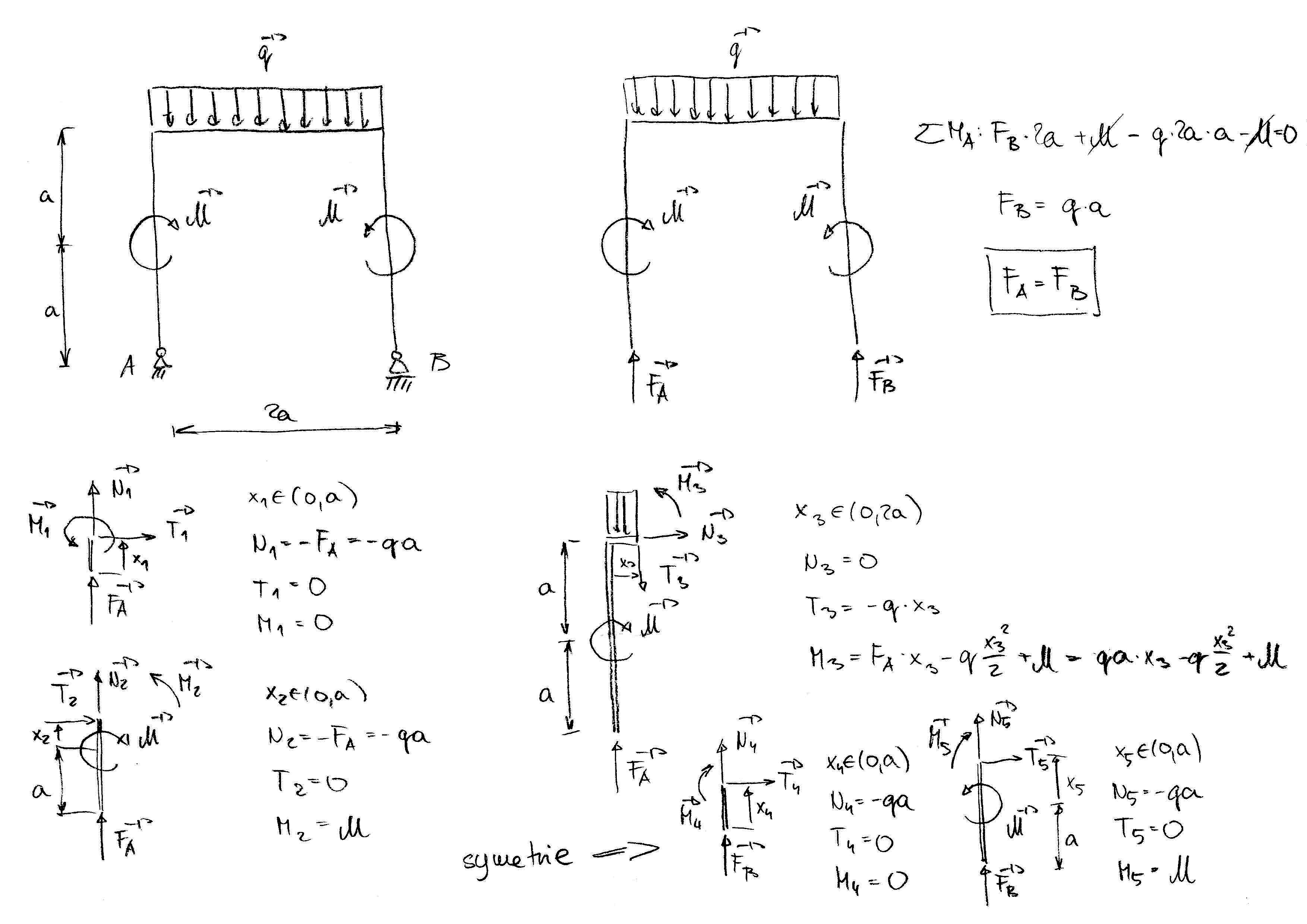
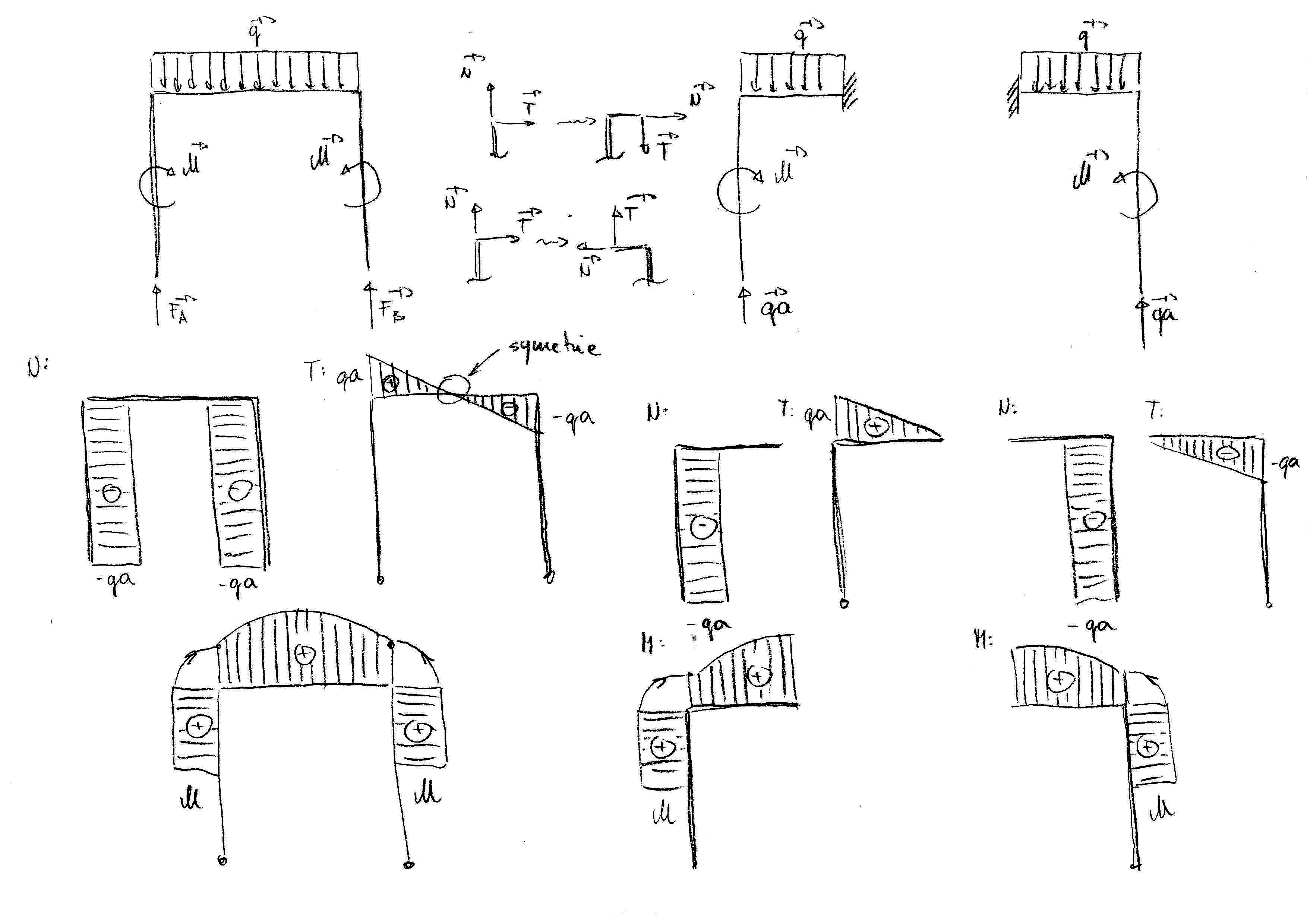
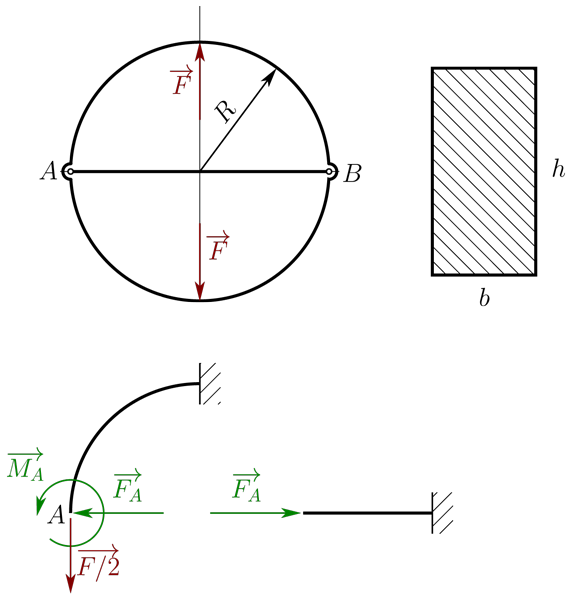
Cvičení 2: VVÚ zalomených prutů.
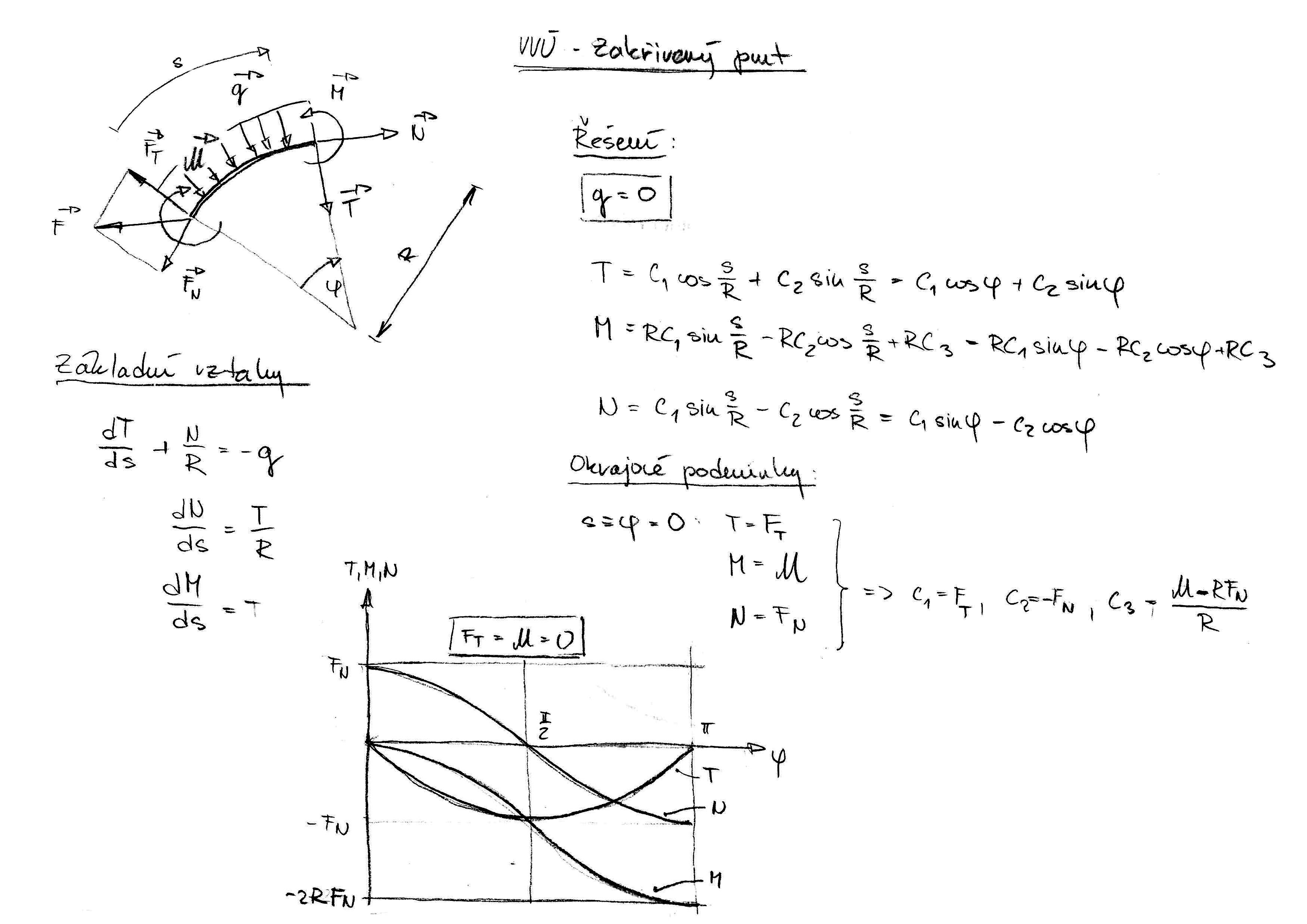
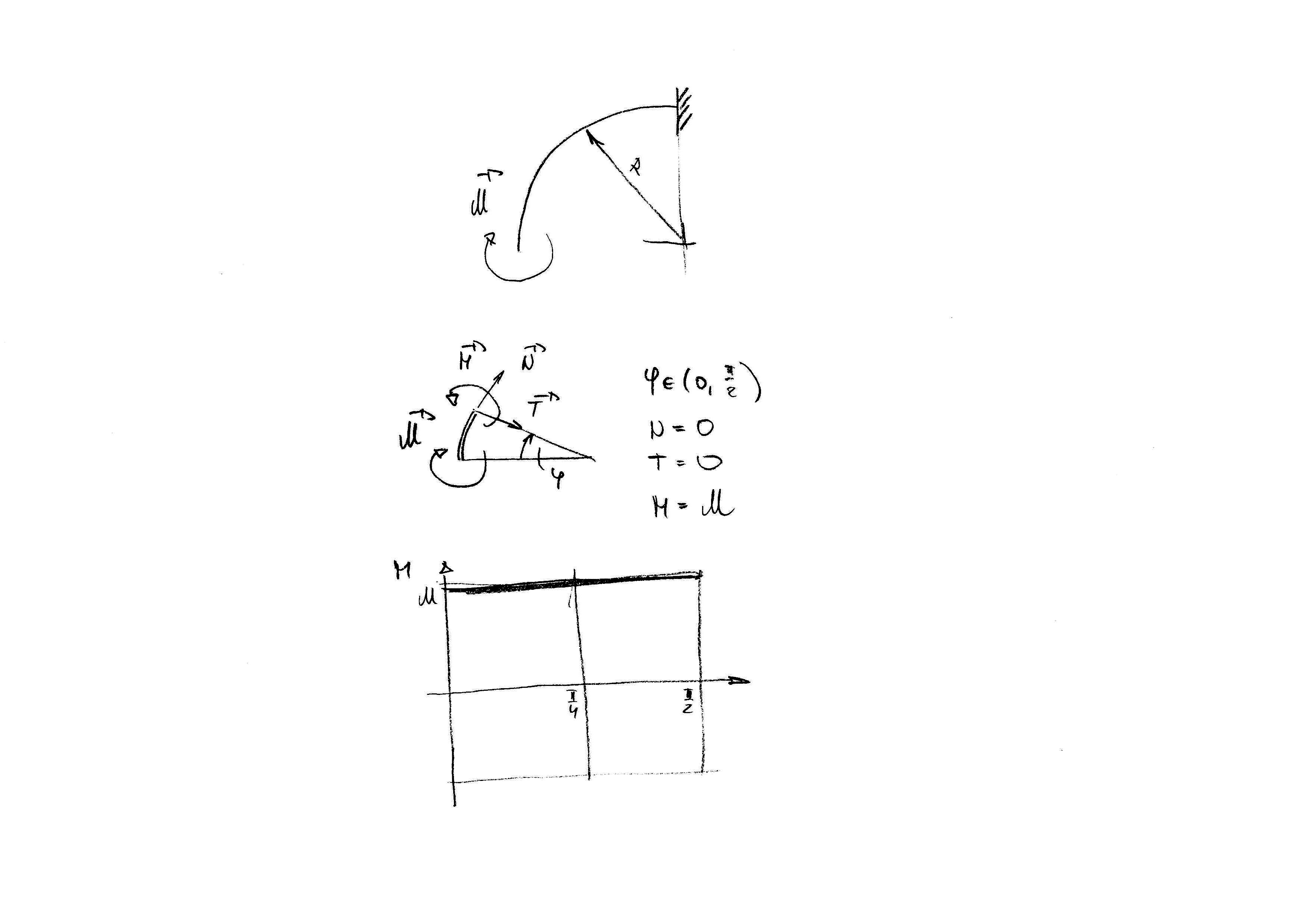
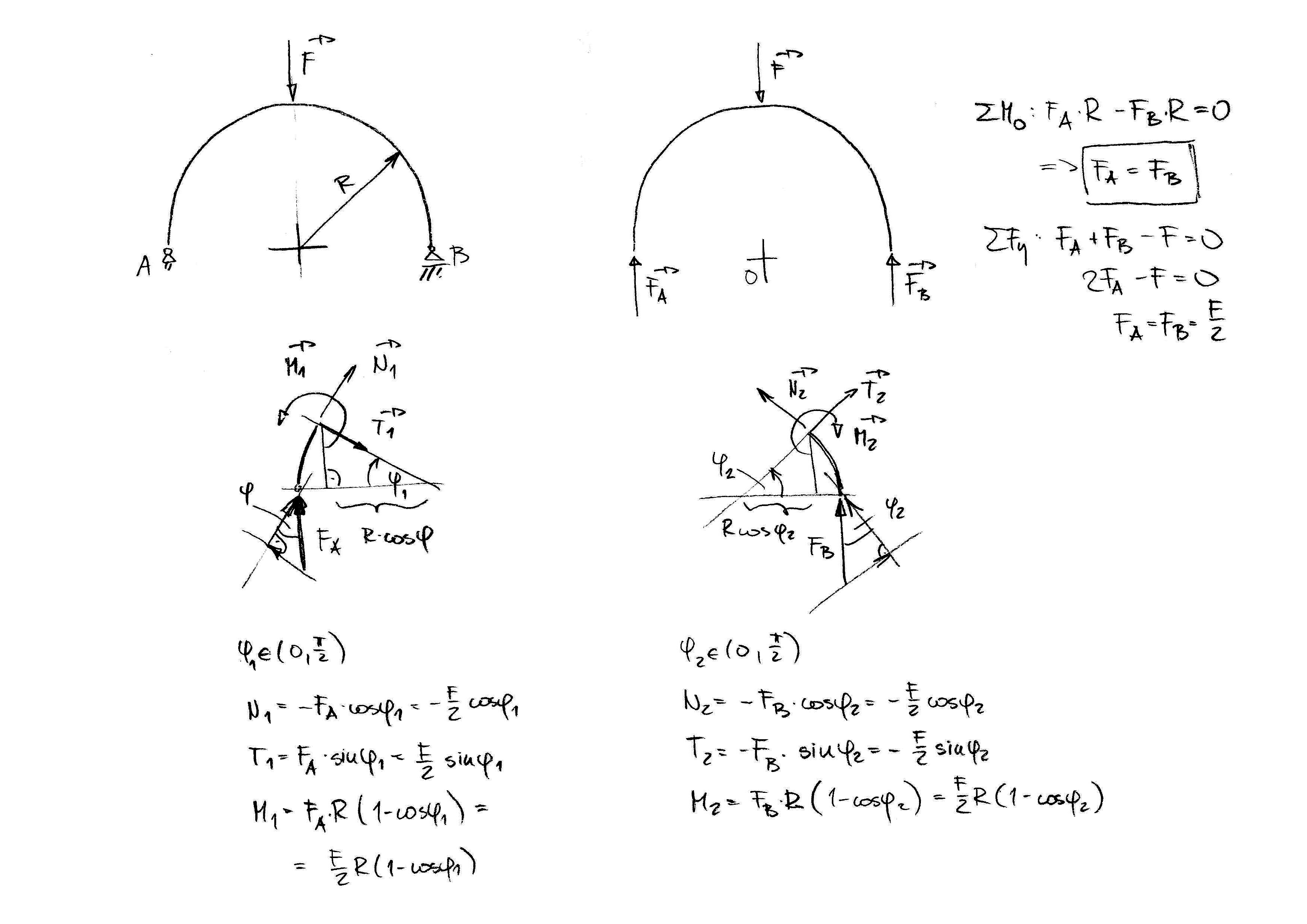
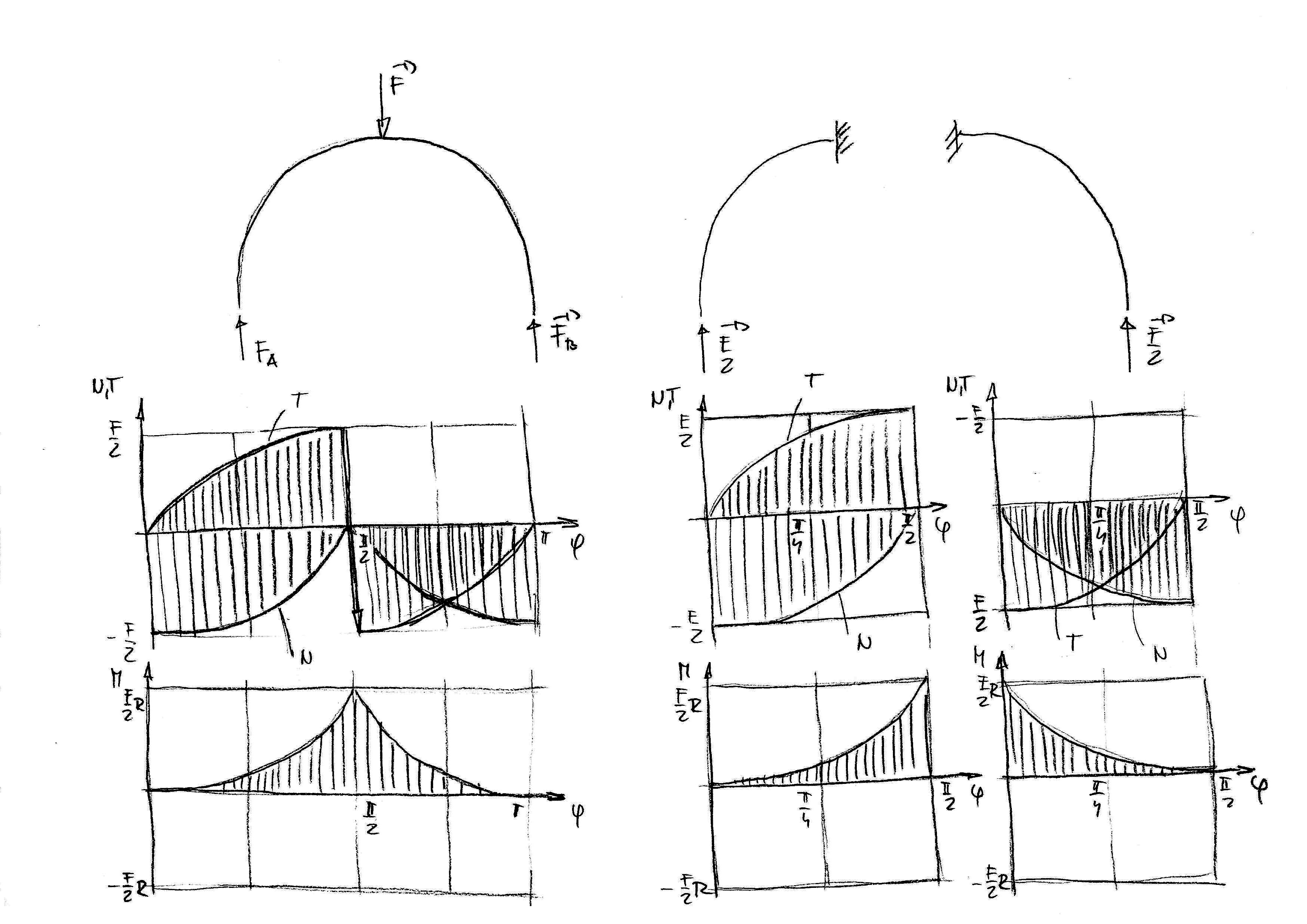
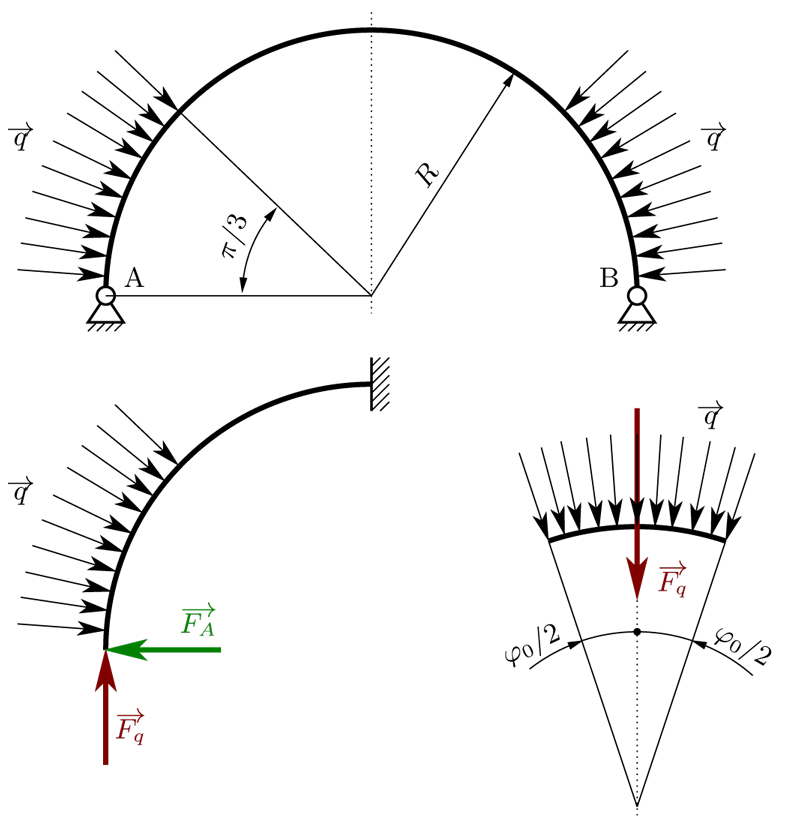
Cvičení 3: VVÚ zakřivených prutů.
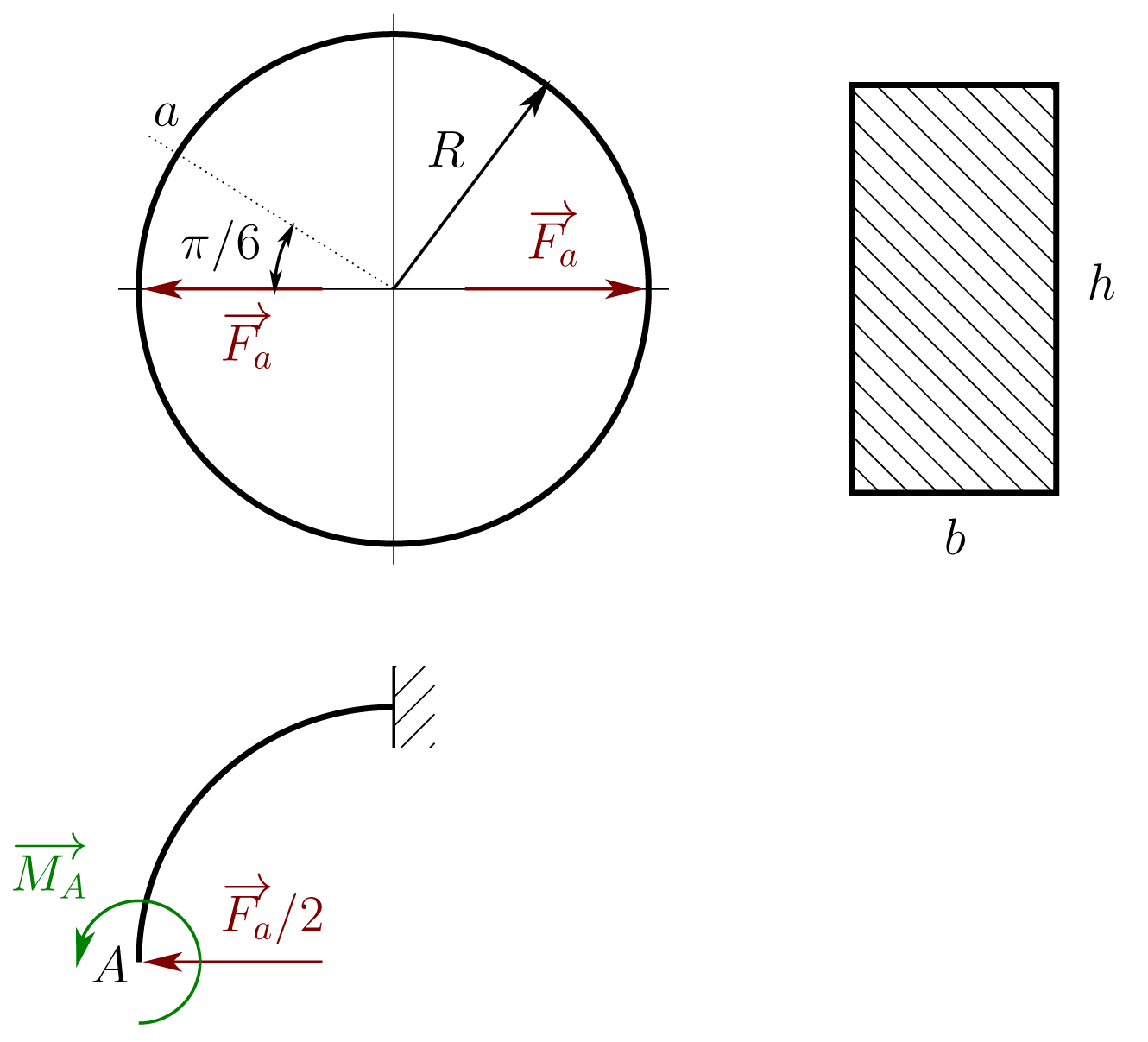
Cvičení 4: Průřezové charakteristiky.
Cvičení 6: Prostý tah.
Příklad v jazyce Python - Př.1. Odpovídající soubor v Jupyteru lze stáhnout
zde. Obrázky lze stáhnoutzdeazde.Příklad v jazyce Python - Př.2. Odpovídající soubor v Jupyteru lze stáhnout
zde. Obrázky lze stáhnoutzde,zdeazde.Příklad v jazyce Python - Př.3. Odpovídající soubor v Jupyteru lze stáhnout
zde. Obrázky lze stáhnoutzdeazde.Příklad v jazyce Python - Př.4. Odpovídající soubor v Jupyteru lze stáhnout
zde. Obrázky lze stáhnoutzde,zdeazde.Příklad v jazyce Python - Př.5. Odpovídající soubor v Jupyteru lze stáhnout
zde.Příklad v jazyce Python - Př.6. Odpovídající soubor v Jupyteru lze stáhnout
zde.Numerické určení hodnot koncentrátoru napětí pomocí metody integrálních rovnic (BIE) je ukázáno zde.
Ručně řešený příklad Př.7 lze stáhnout
zde.Ručně řešený příklad Př.8 lze stáhnout
zde.
Cvičení 7: Ohyb přímých prutů.
Příklad v jazyce Python - Př.1. Odpovídající soubor v Jupyteru lze stáhnout
zde. Obrázky lze stáhnoutzdeazde.Příklad v jazyce Python - Př.2. Odpovídající soubor v Jupyteru lze stáhnout
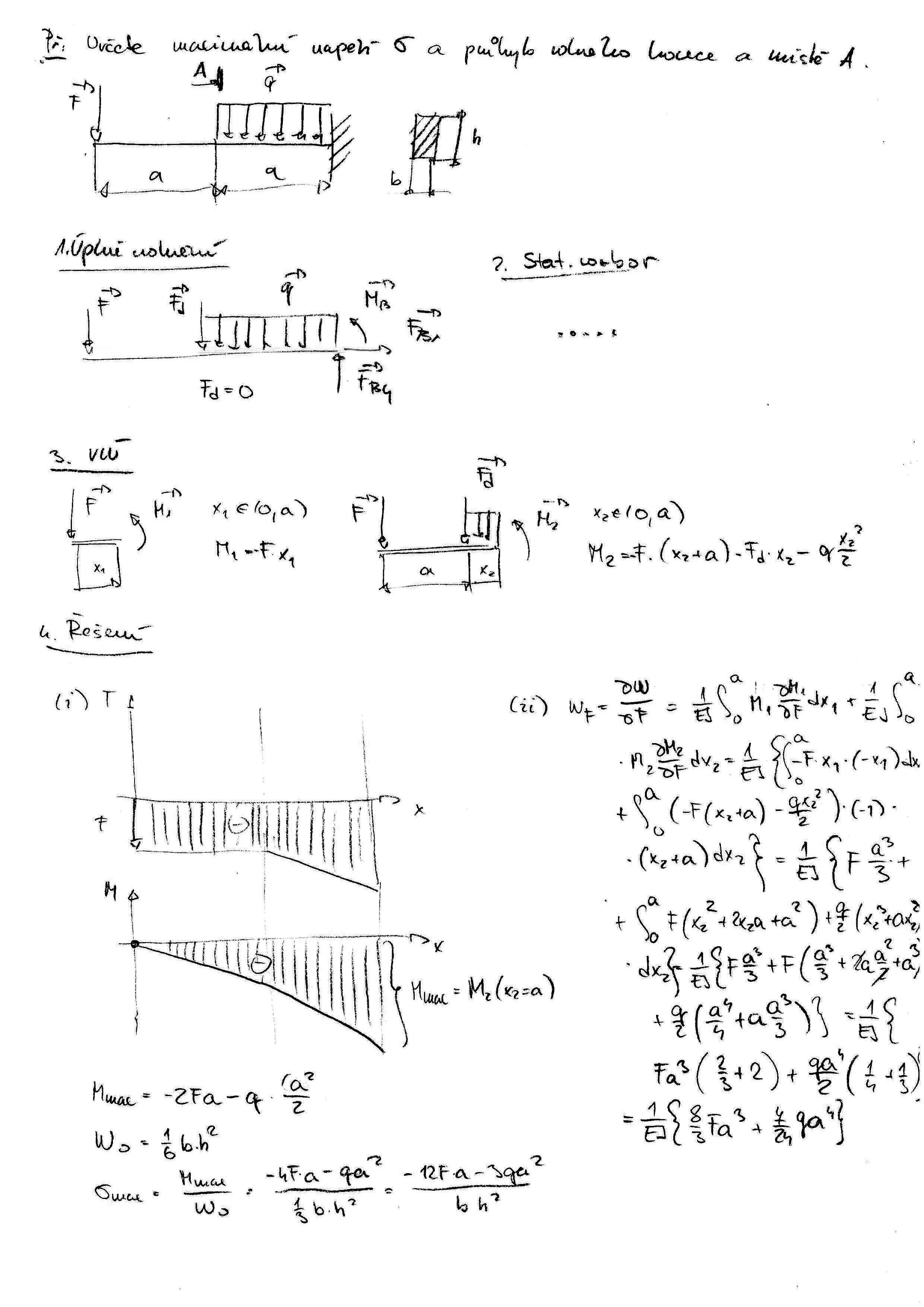
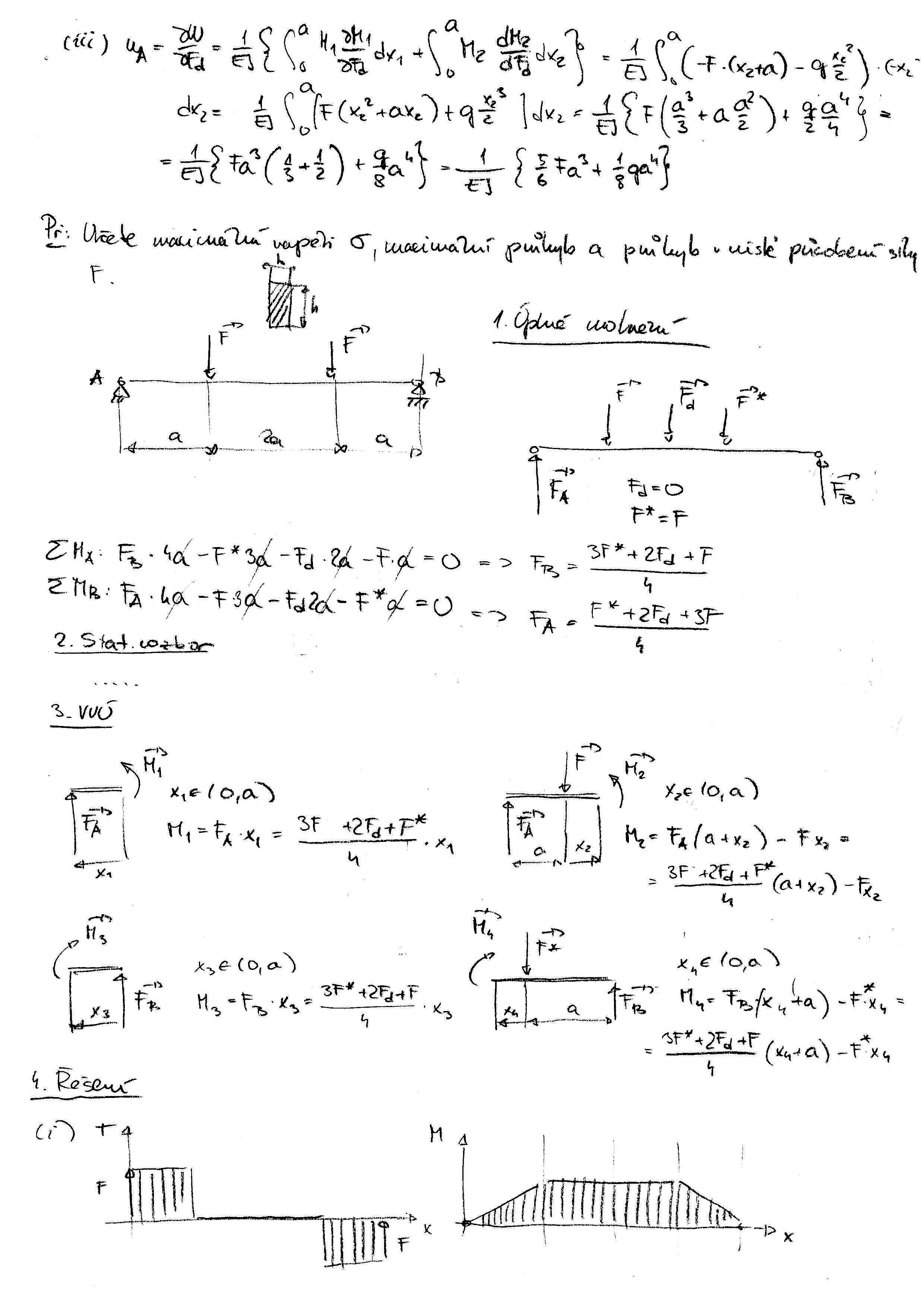
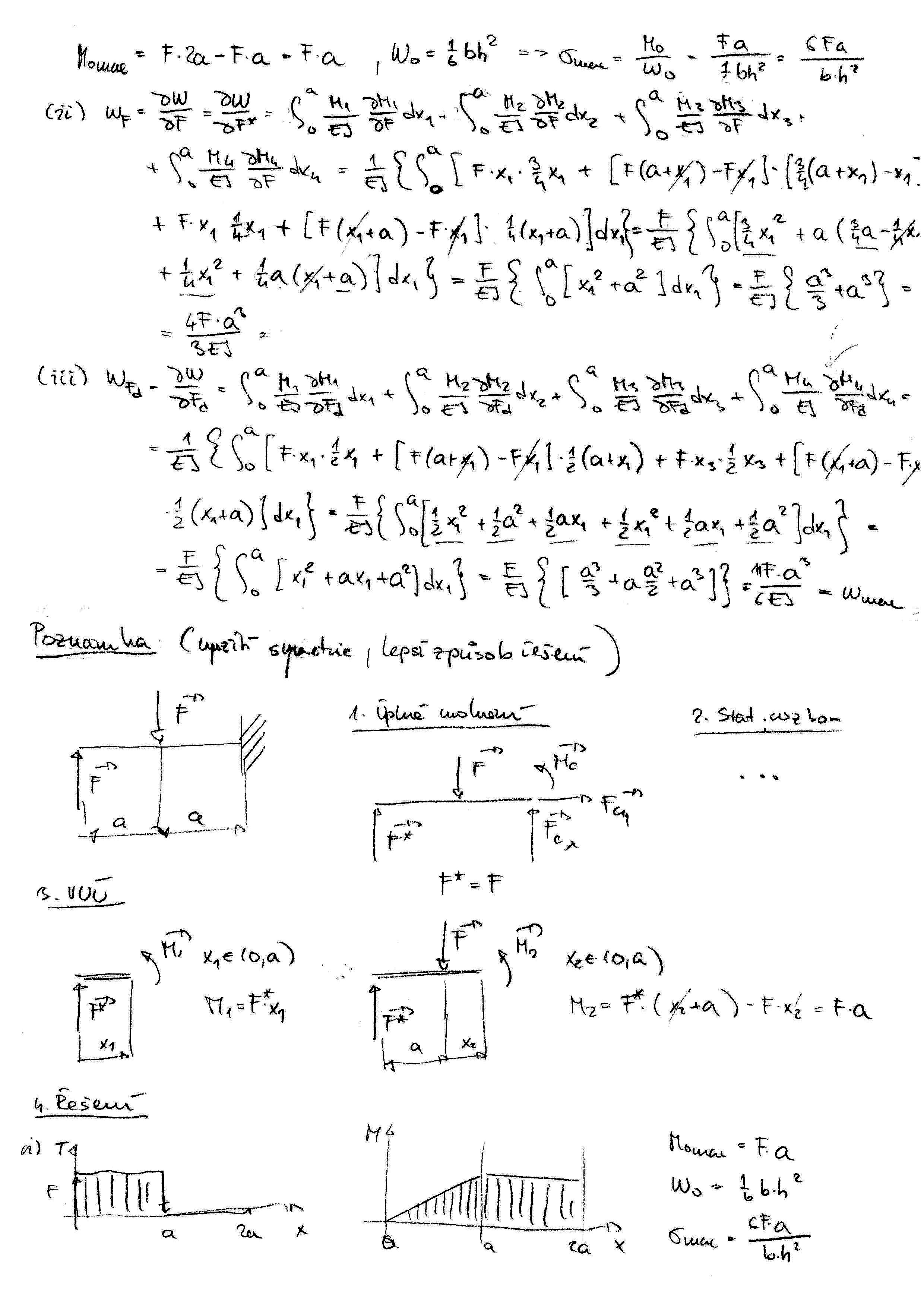
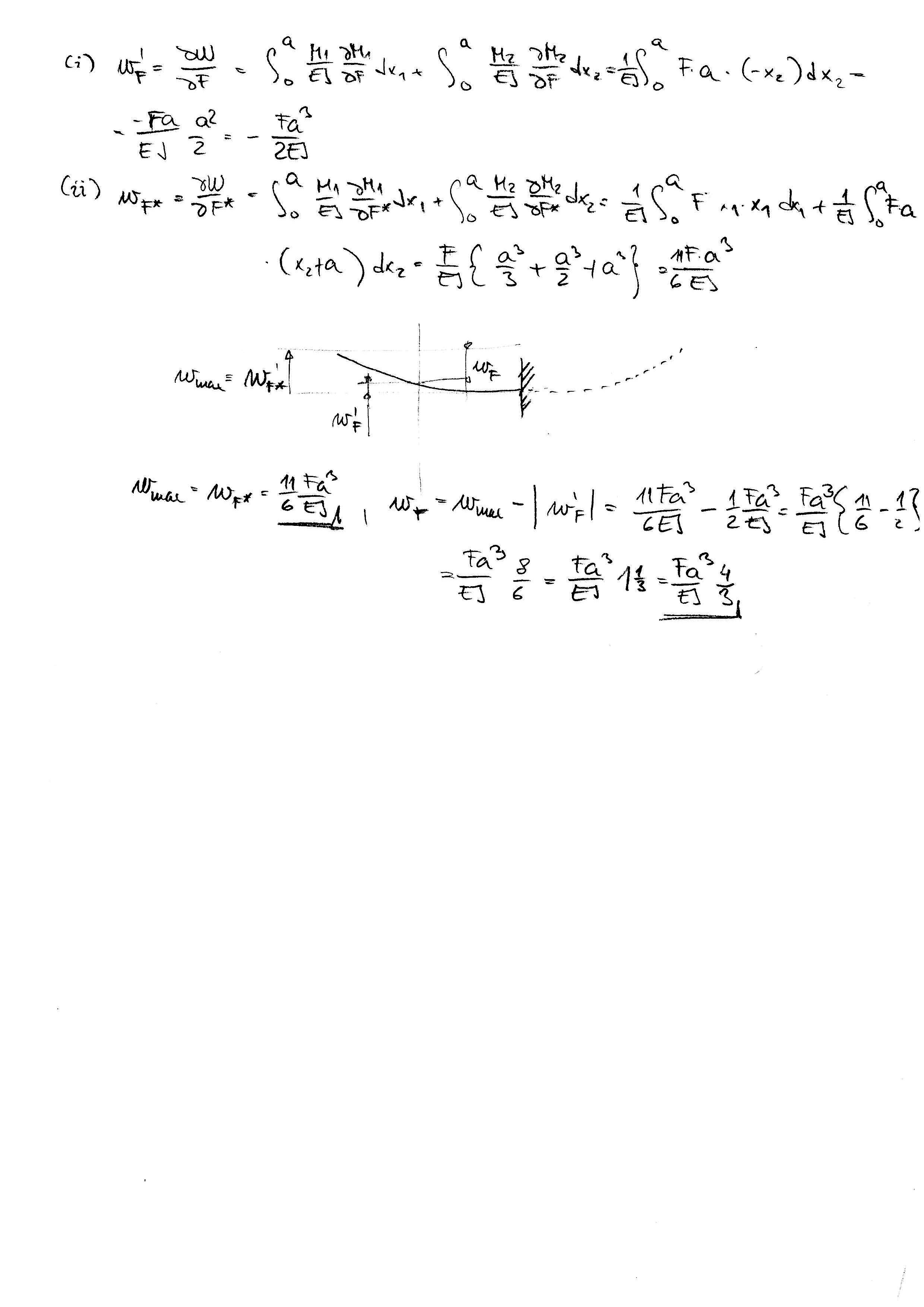
zde.Ručně řešený příklad Př.3 a Př.4 lze stáhnout
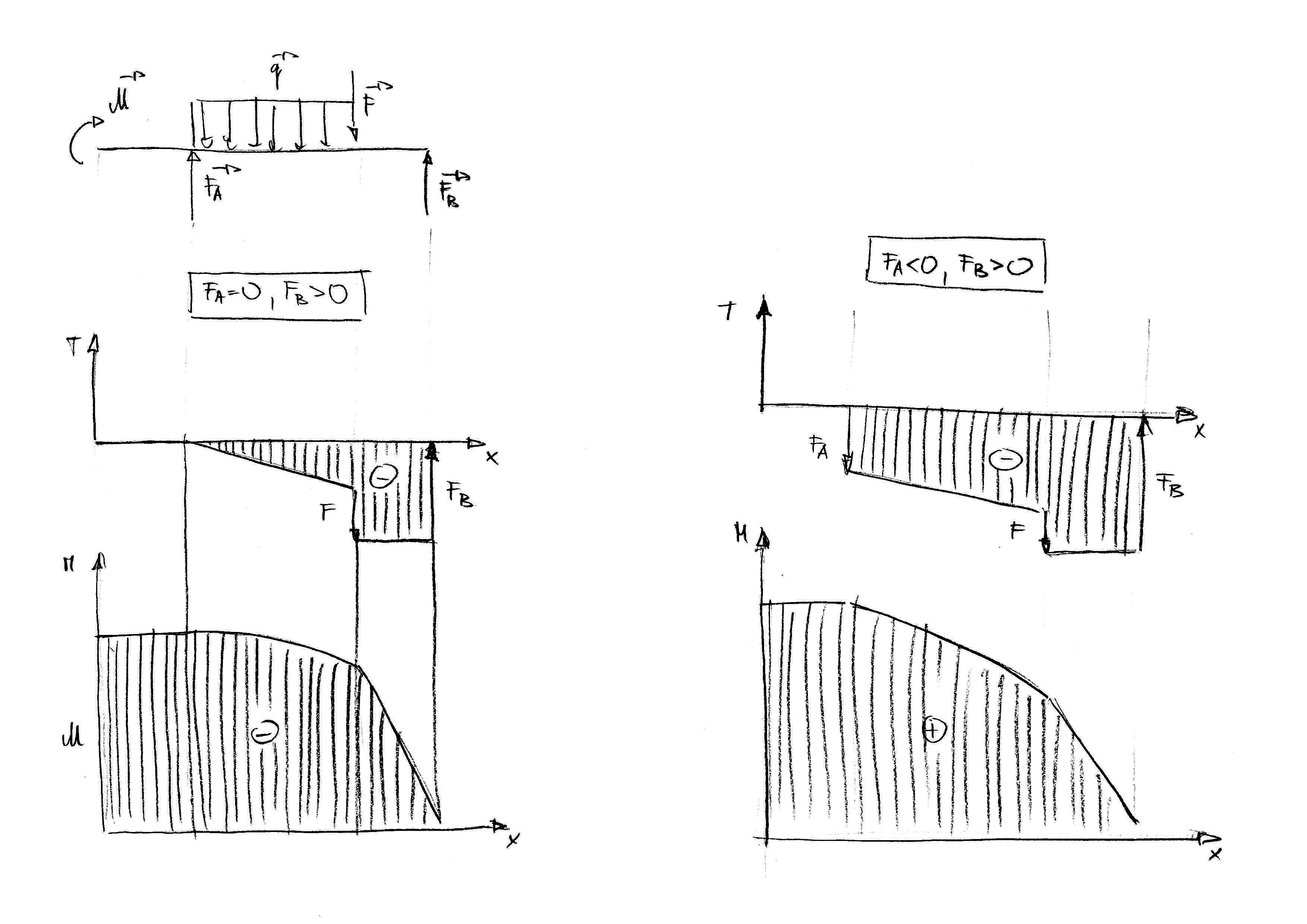
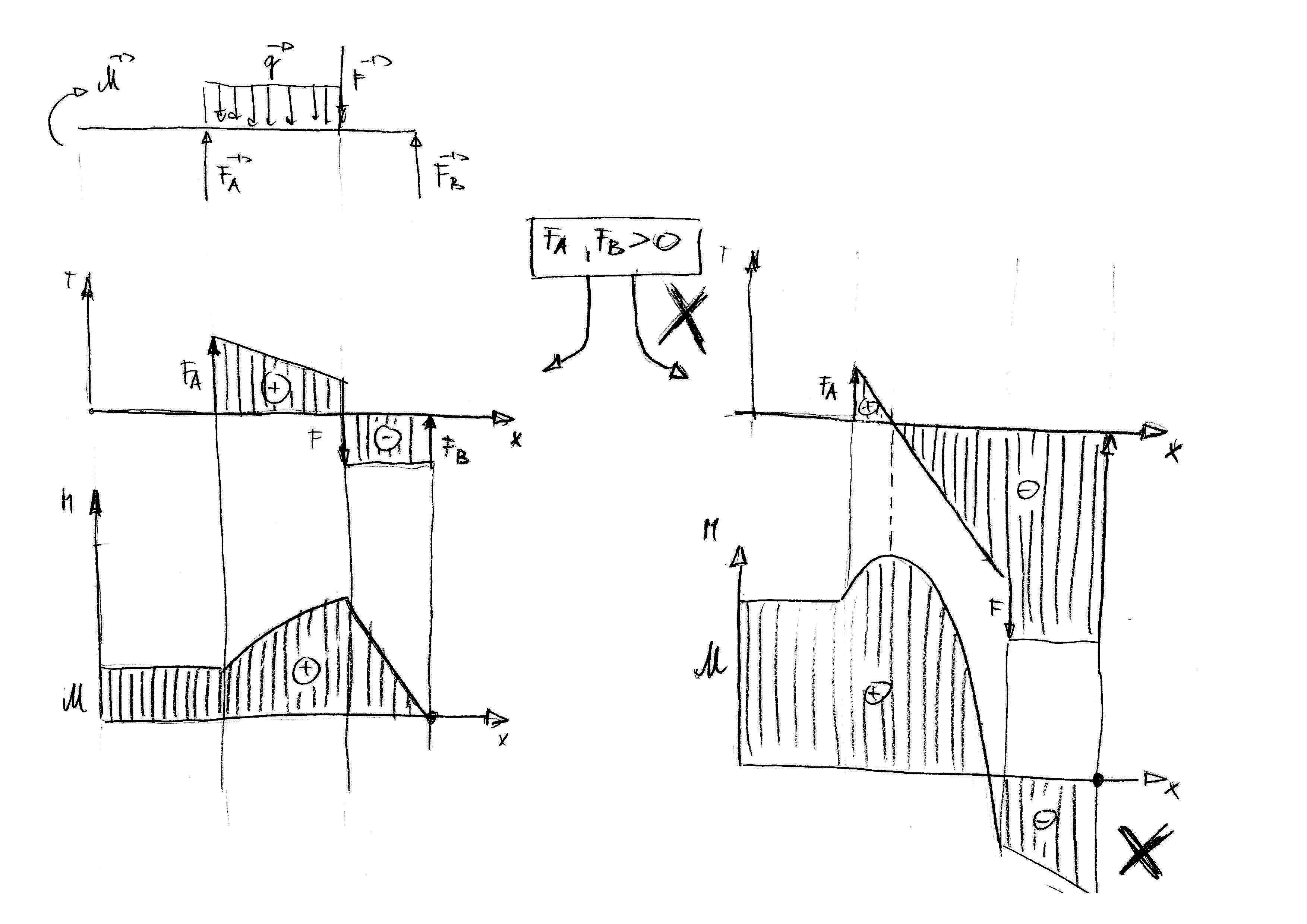
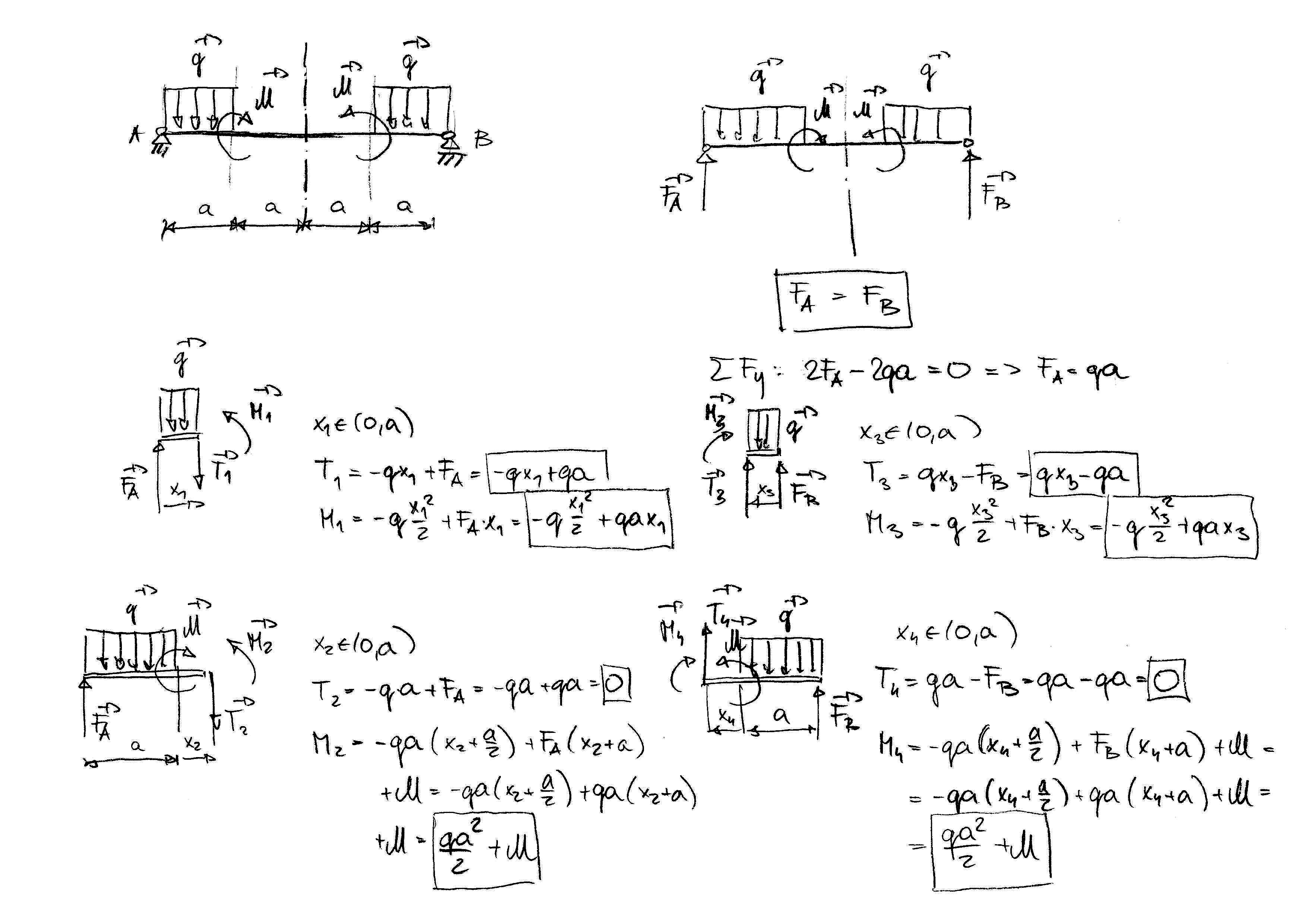
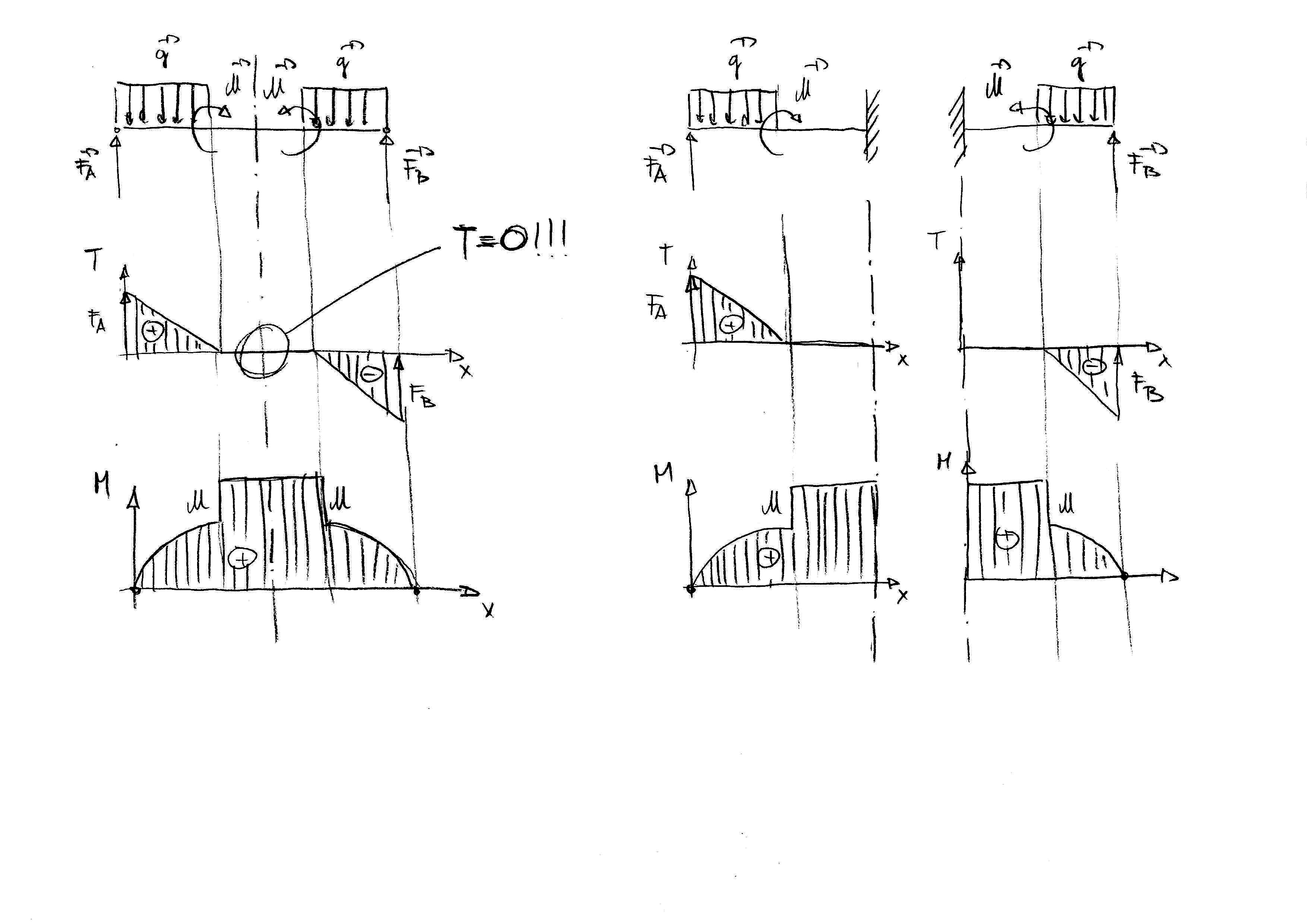
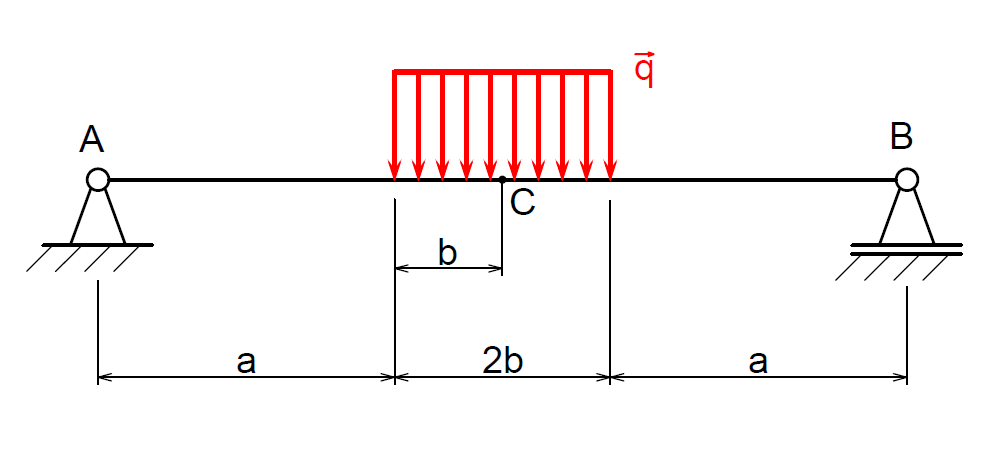
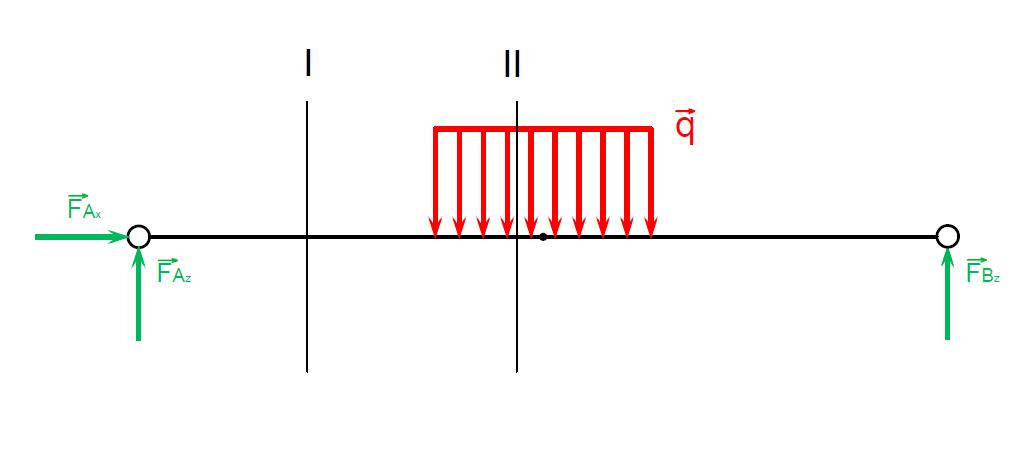
zde.Př.5 a Př.6 - Prostý ohyb staticky určitě uložených přímých prutů:
mp4,mp4,jpg,jpg,jpg,jpg
Cvičení 8: Ohyb zalomených prutů.
Příklad v jazyce Python - Př.1. Odpovídající soubor v Jupyteru lze stáhnout
zde. Obrázky lze stáhnoutzdeazde.Příklad v jazyce Python - Př.2. Odpovídající soubor v Jupyteru lze stáhnout
zde. Obrázky lze stáhnoutzde,zdeazde.Příklad v jazyce Python - Př.3. Odpovídající soubor v Jupyteru lze stáhnout
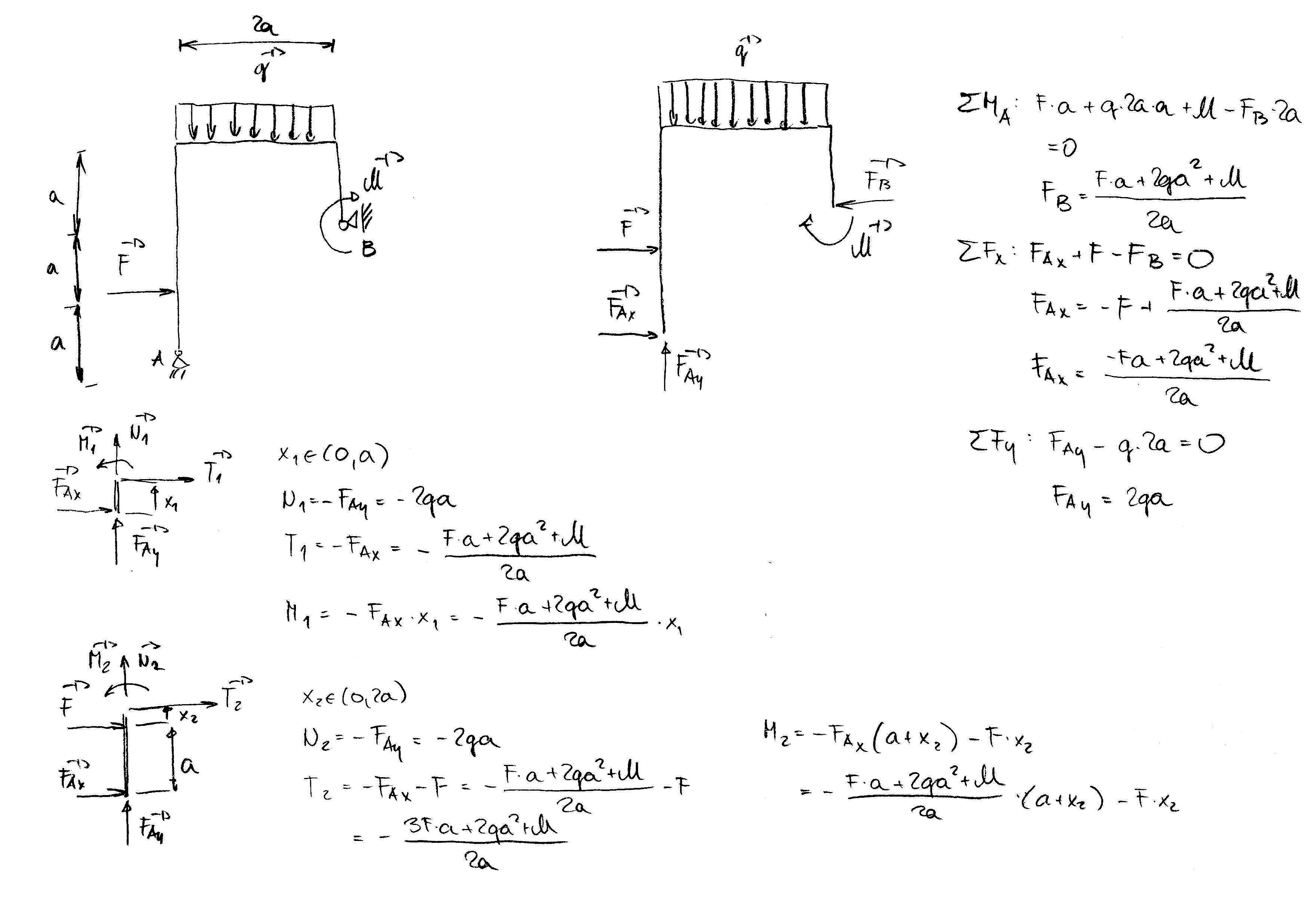
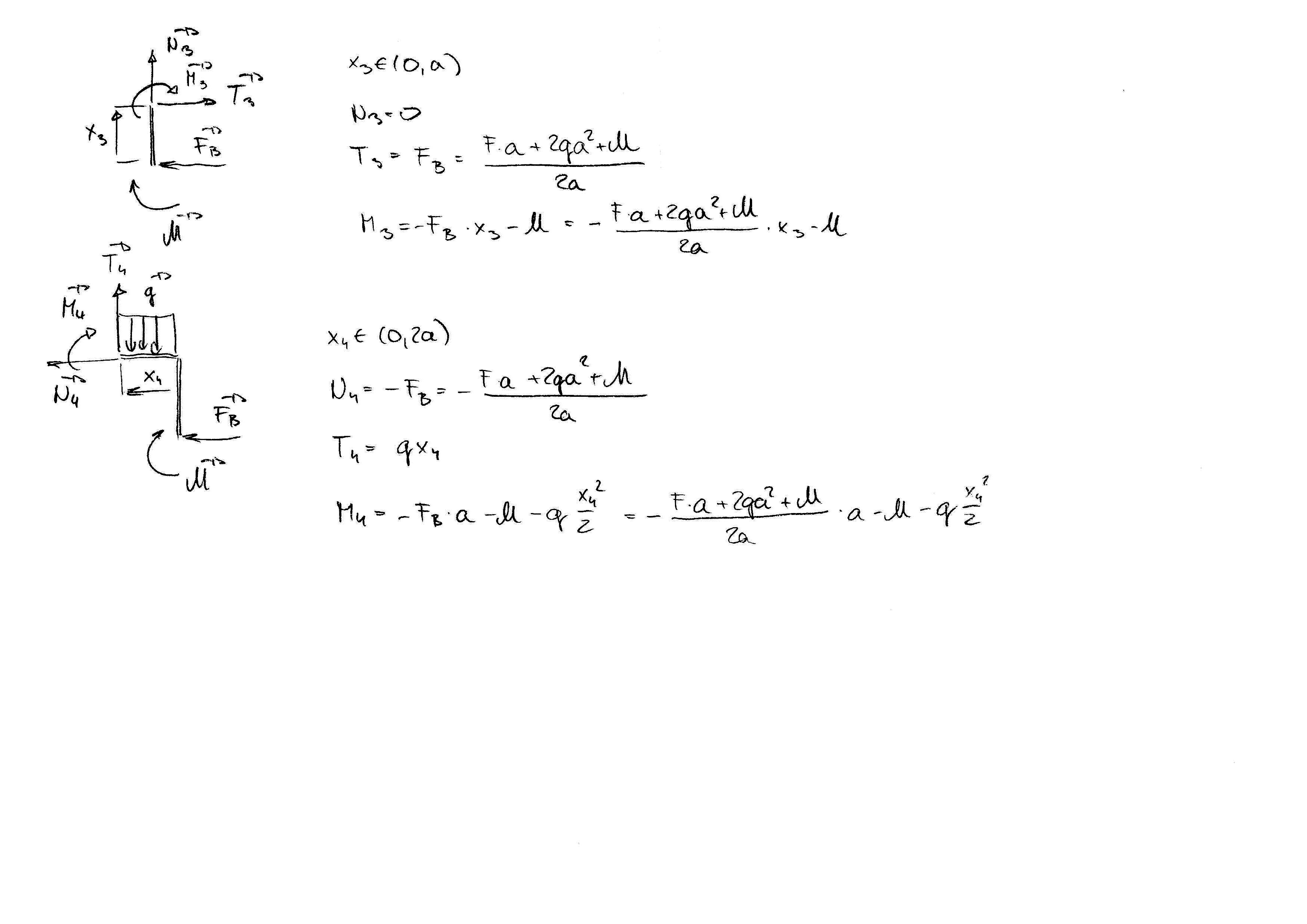
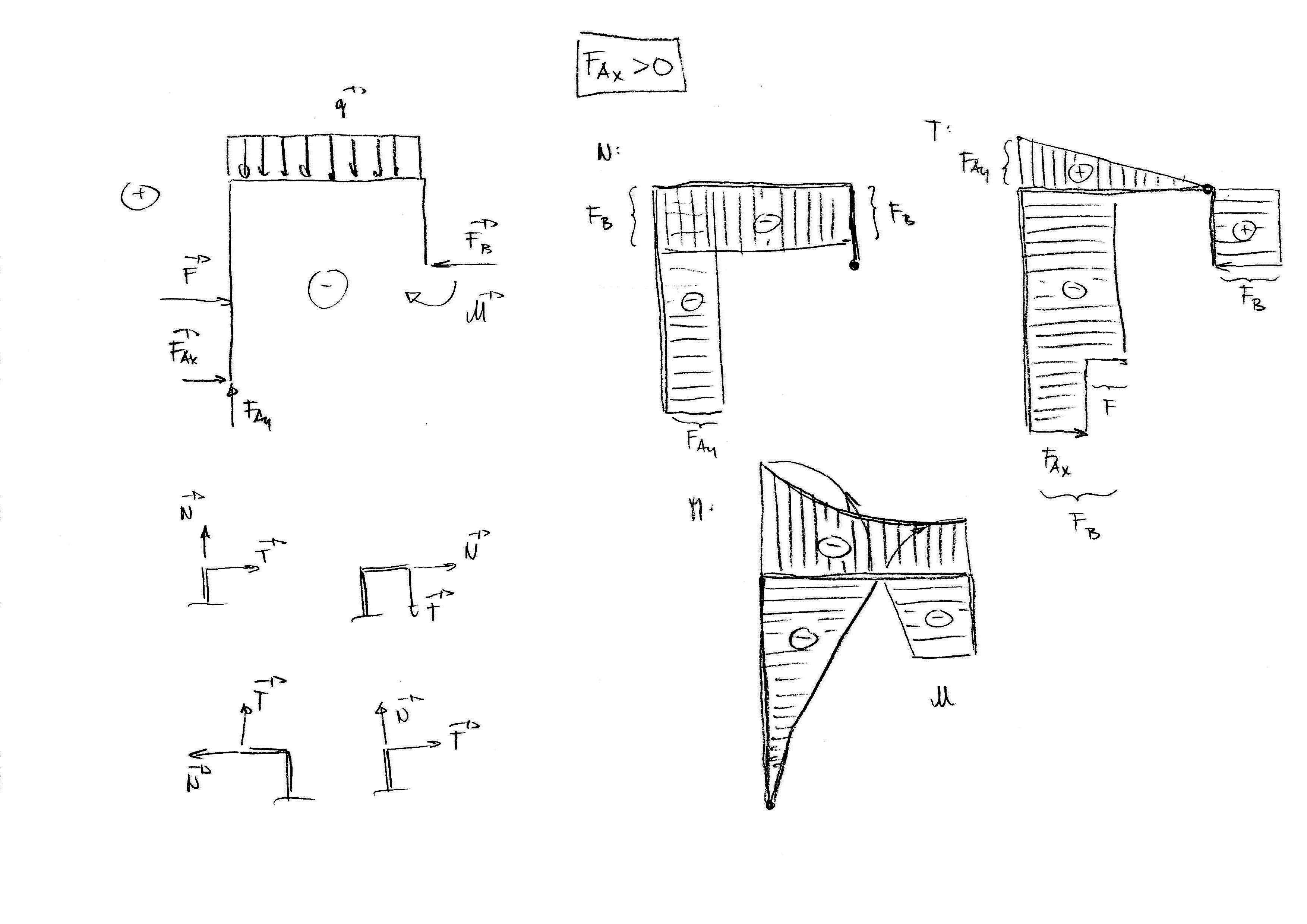
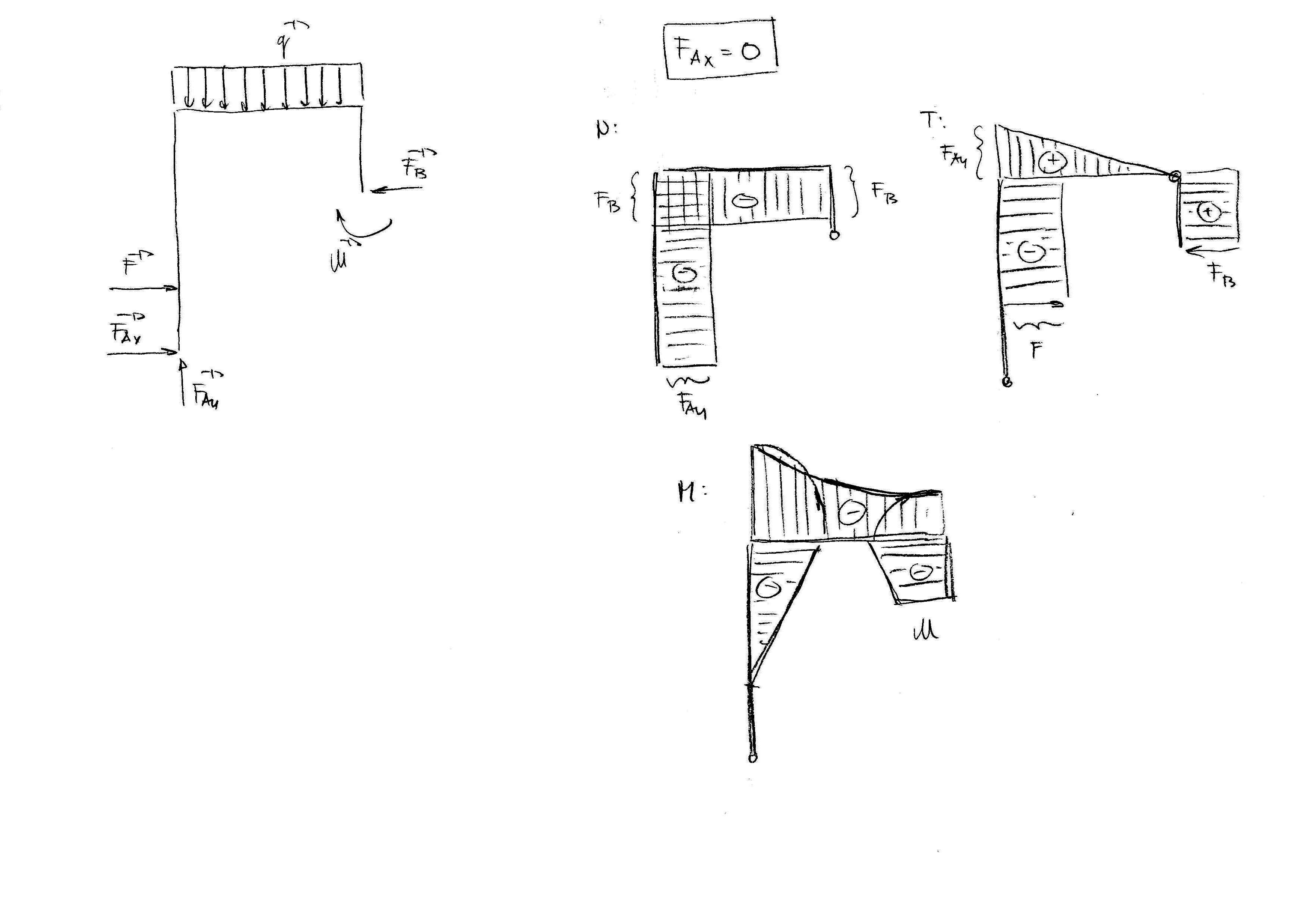
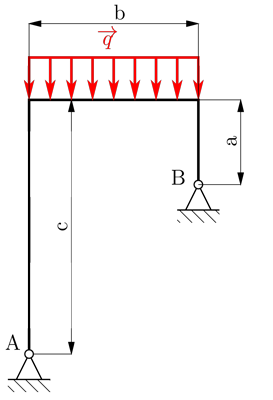
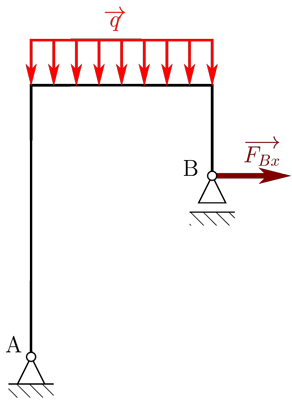
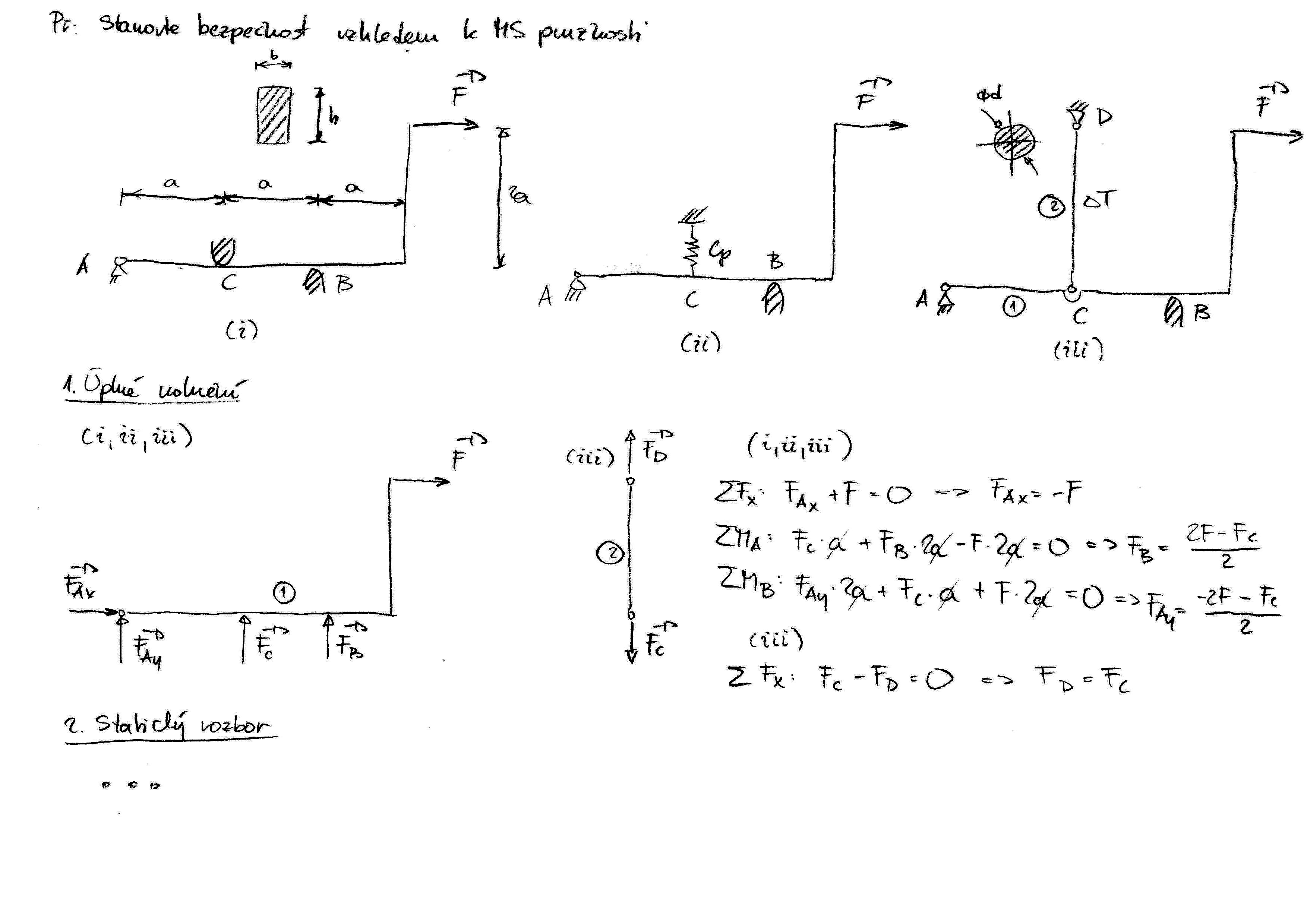
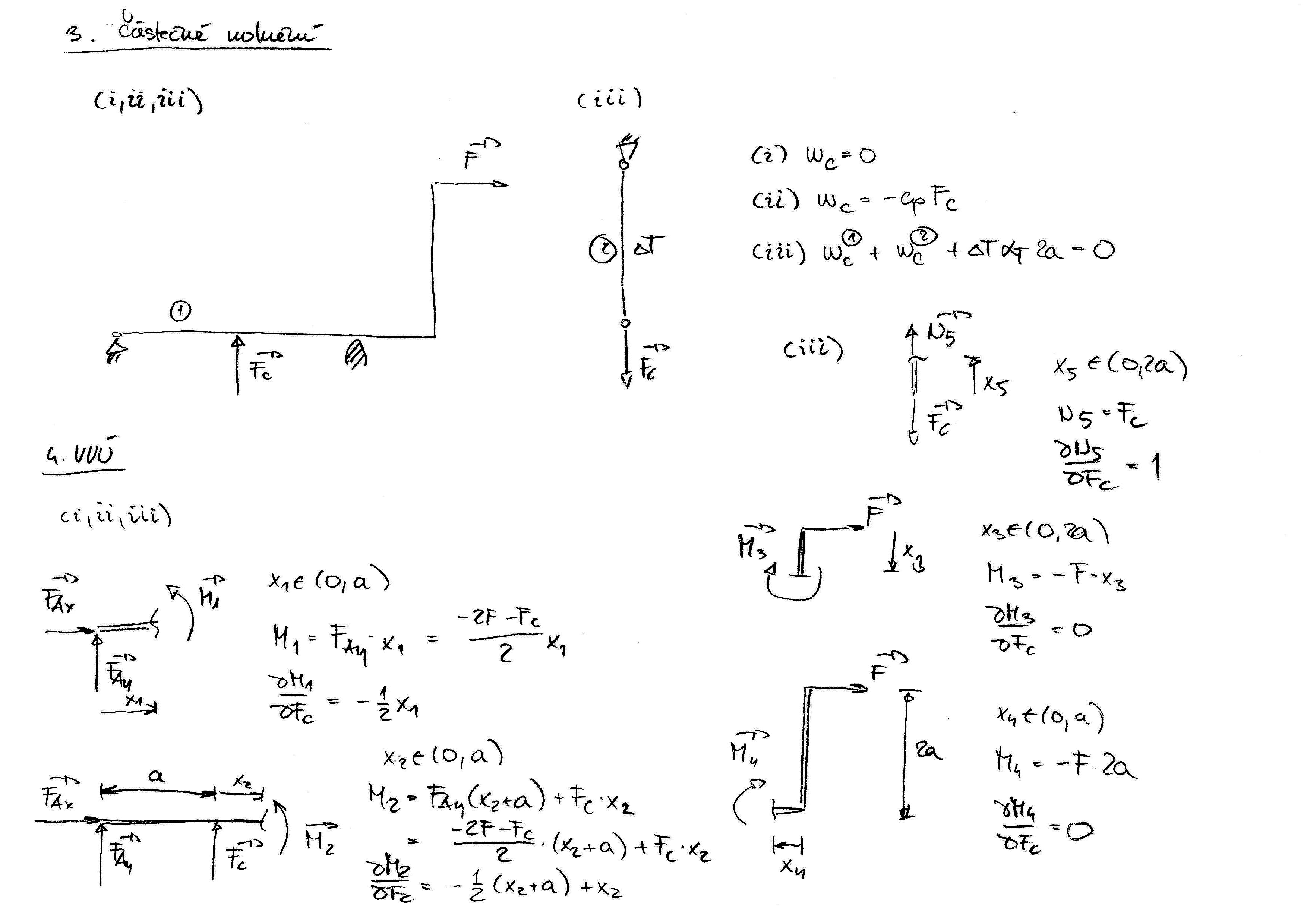
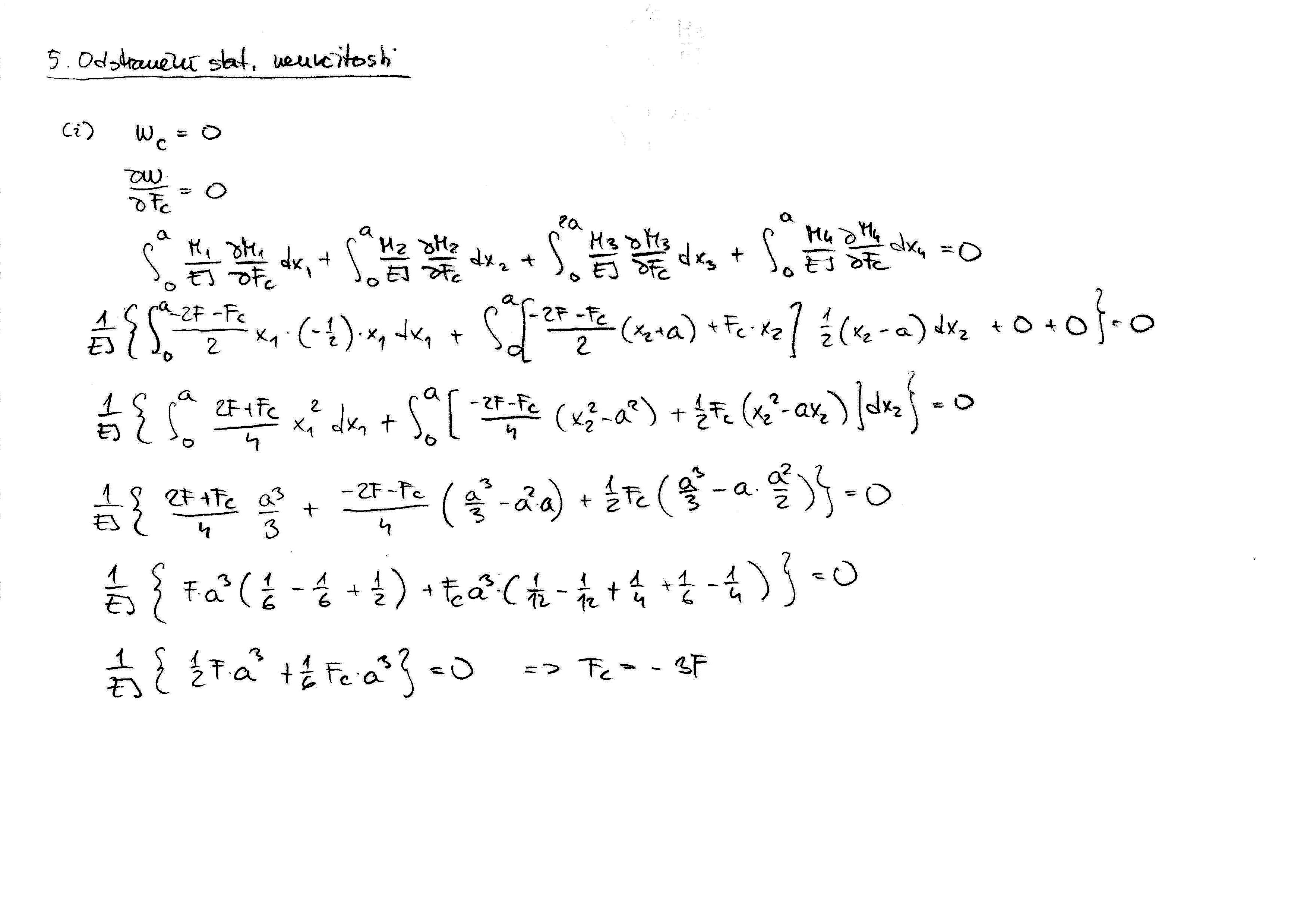
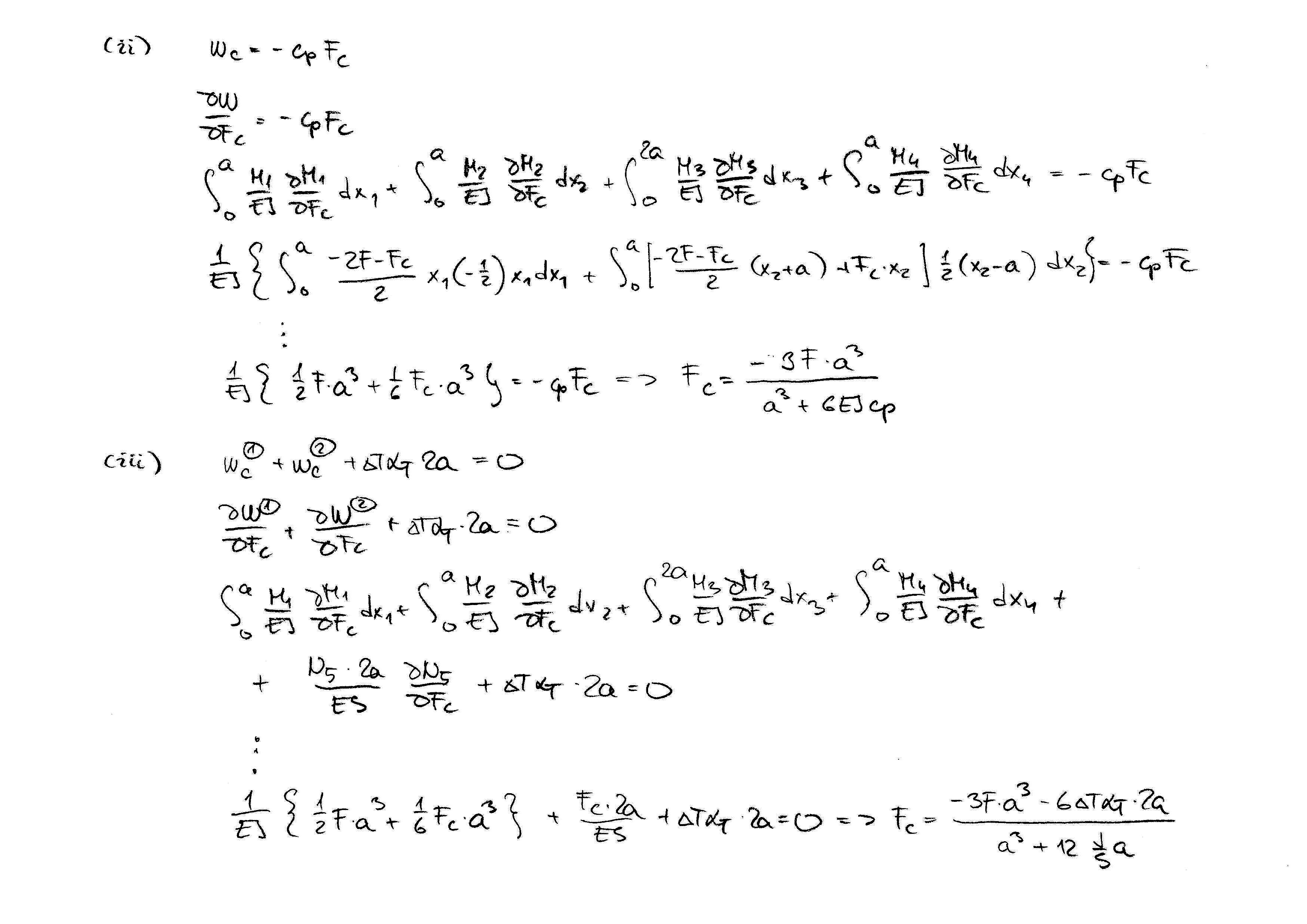
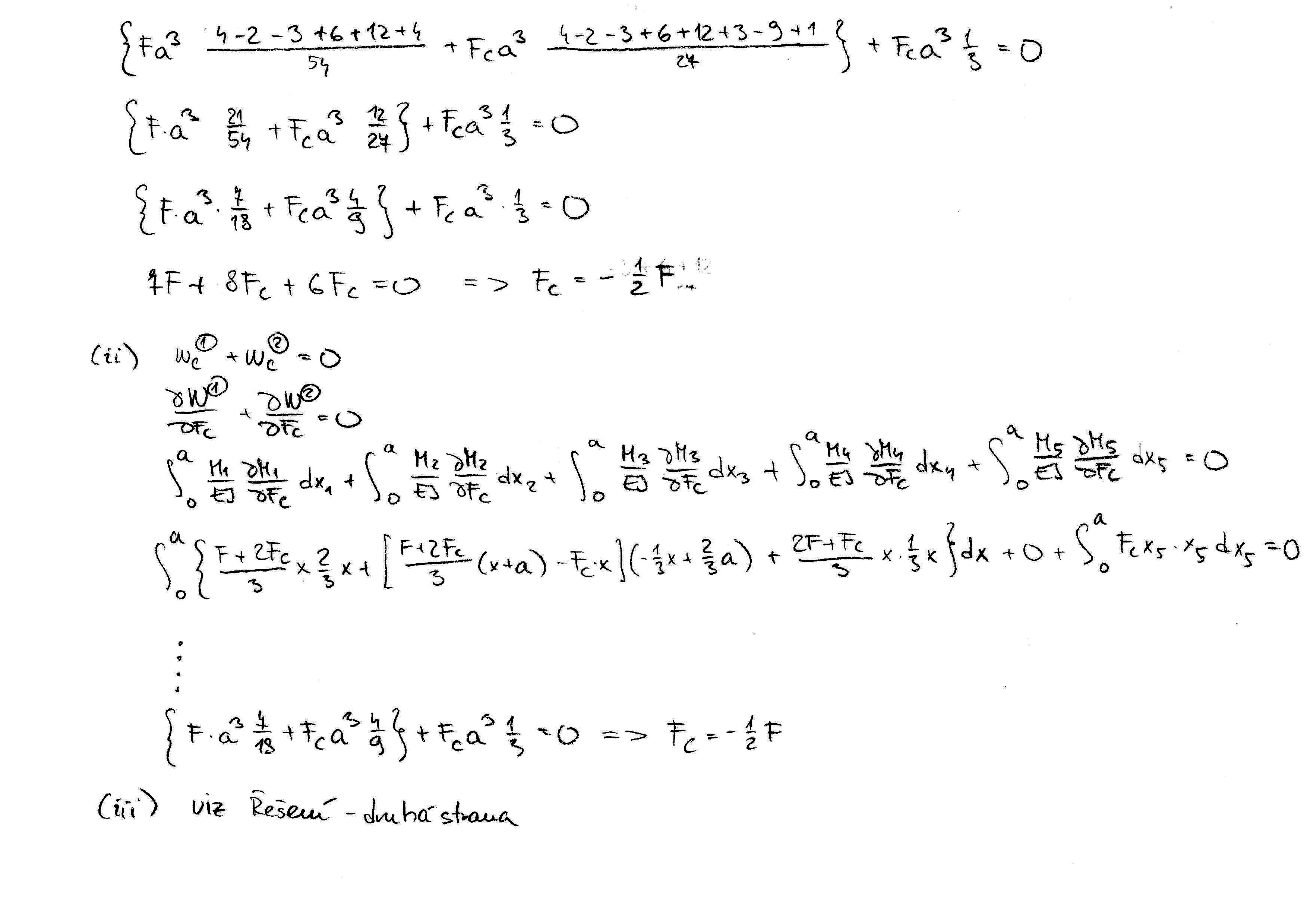
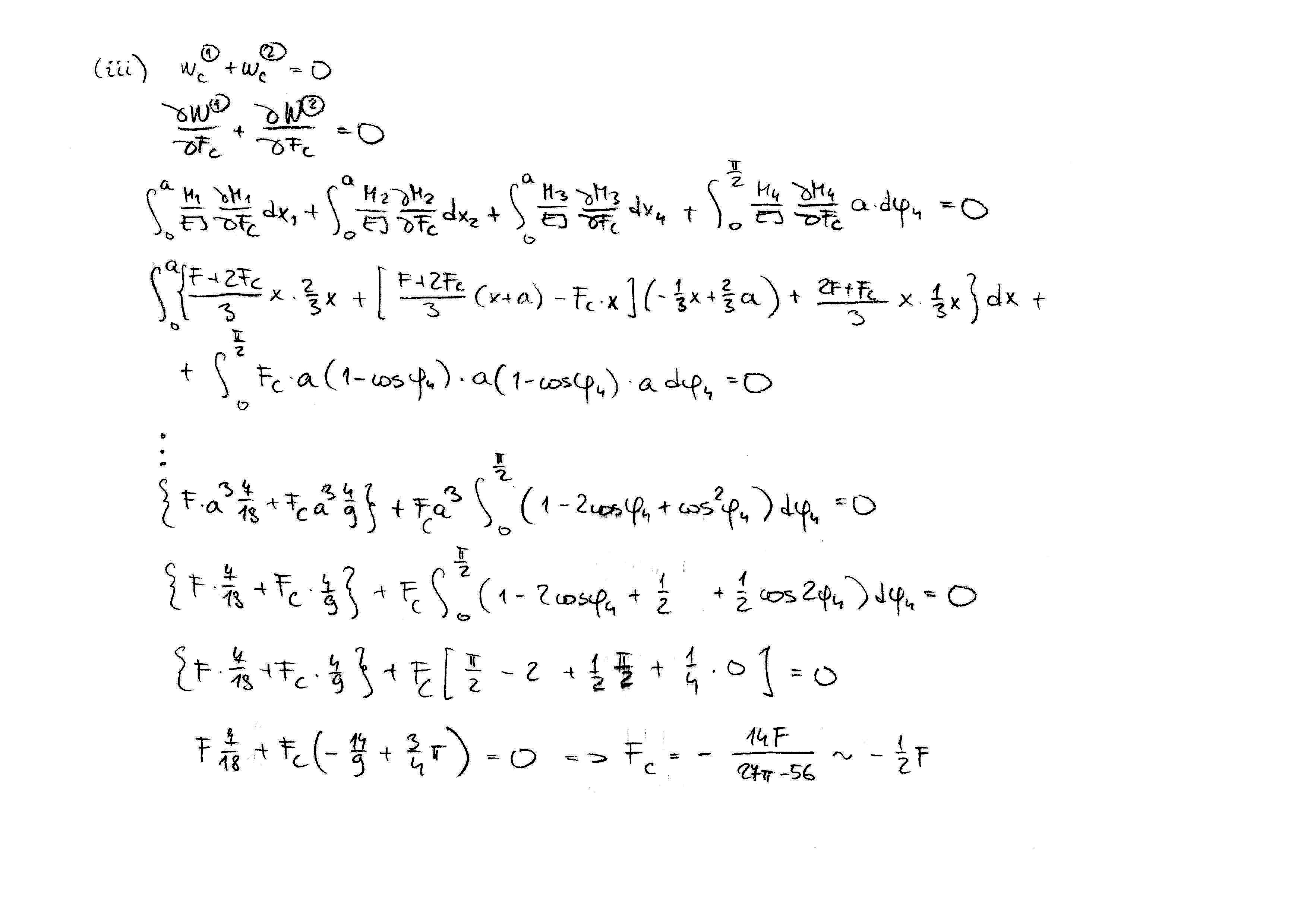
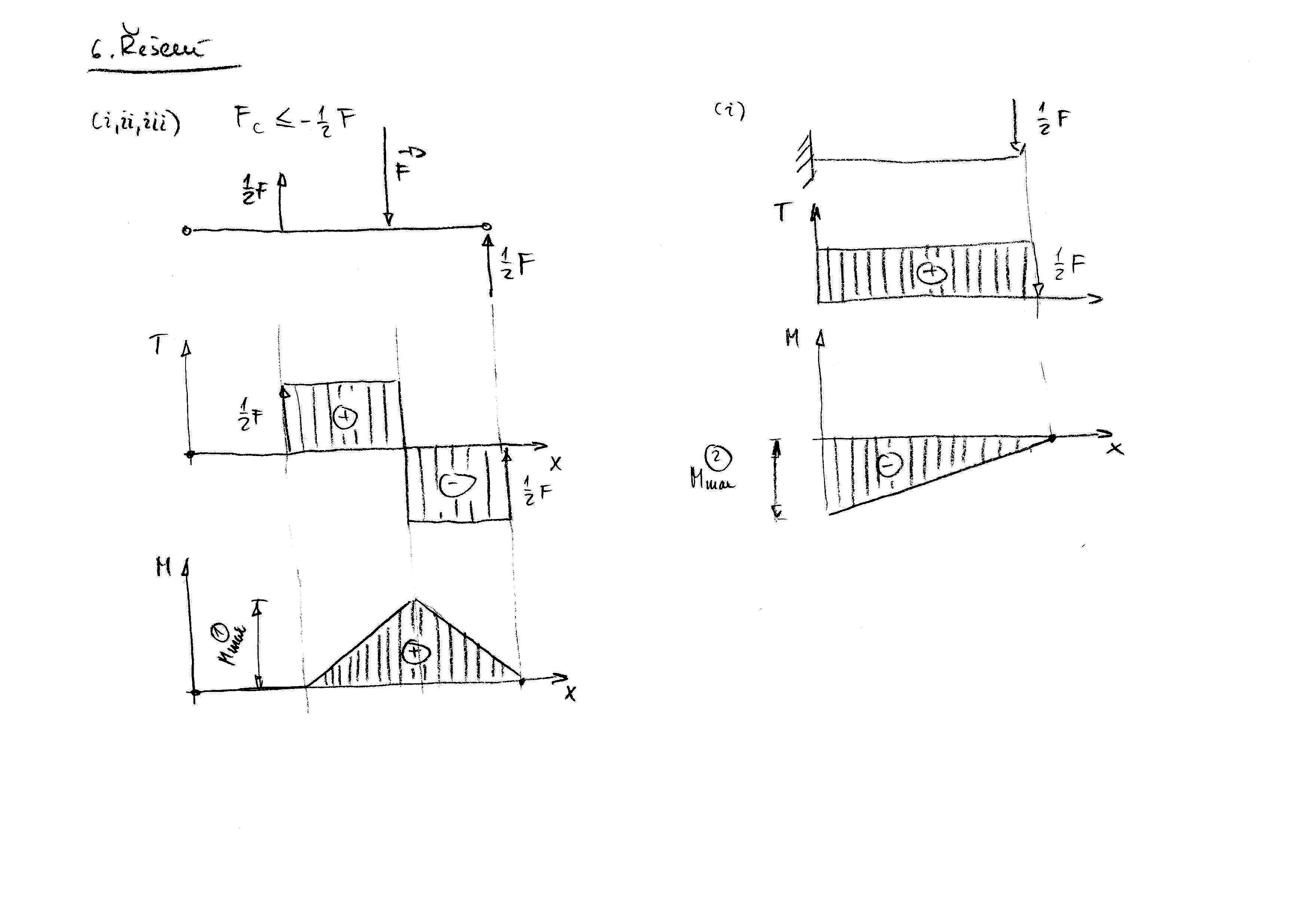
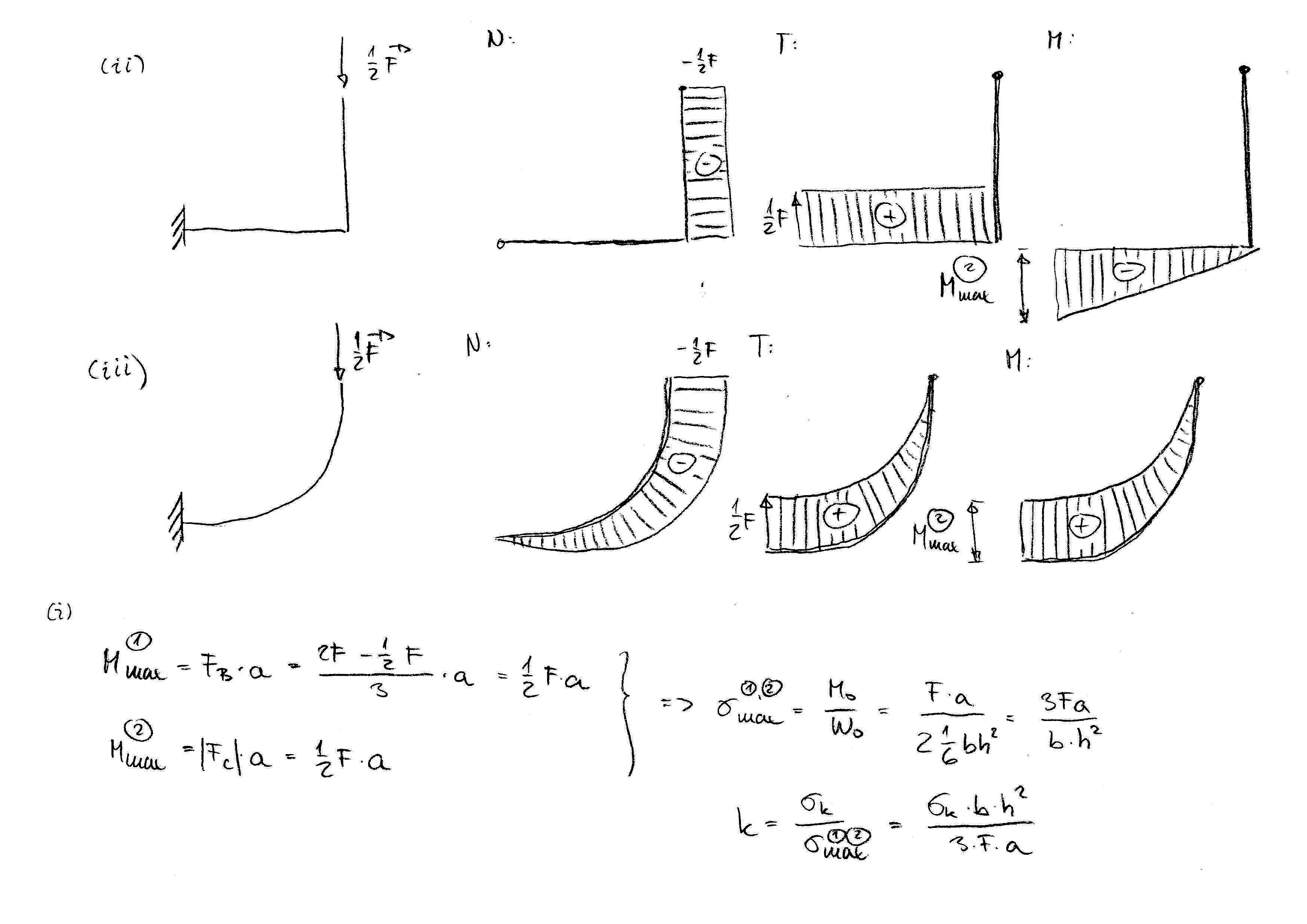
zde. Obrázky lze stáhnoutzdeazde.Př.4, Př.5 a Př.6 - Prostý ohyb staticky neurčitě uložených zalomených prutů:
mp4,jpg,jpg,jpg,jpg,jpg,jpg
Cvičení 9: Ohyb zakřivených prutů.
Příklad v jazyce Python - Př.1. Odpovídající soubor v Jupyteru lze stáhnout
zde. Obrázky lze stáhnoutzde,zdeazde.Příklad v jazyce Python - Př.2. Odpovídající soubor v Jupyteru lze stáhnout
zde.Př.3, Př.4 a Př.5 - Prostý ohyb soustavy přímého a zakřiveného prutu:
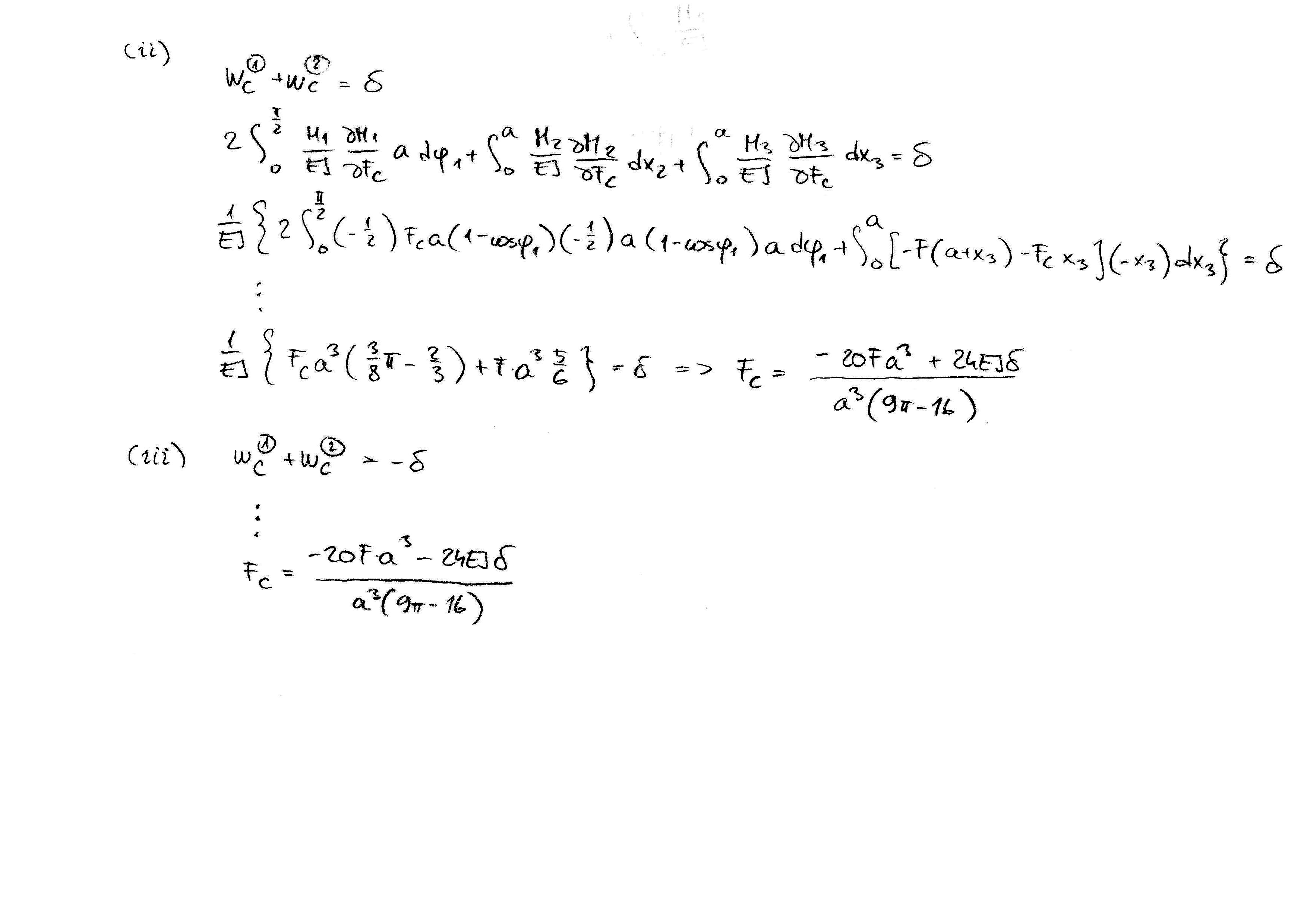
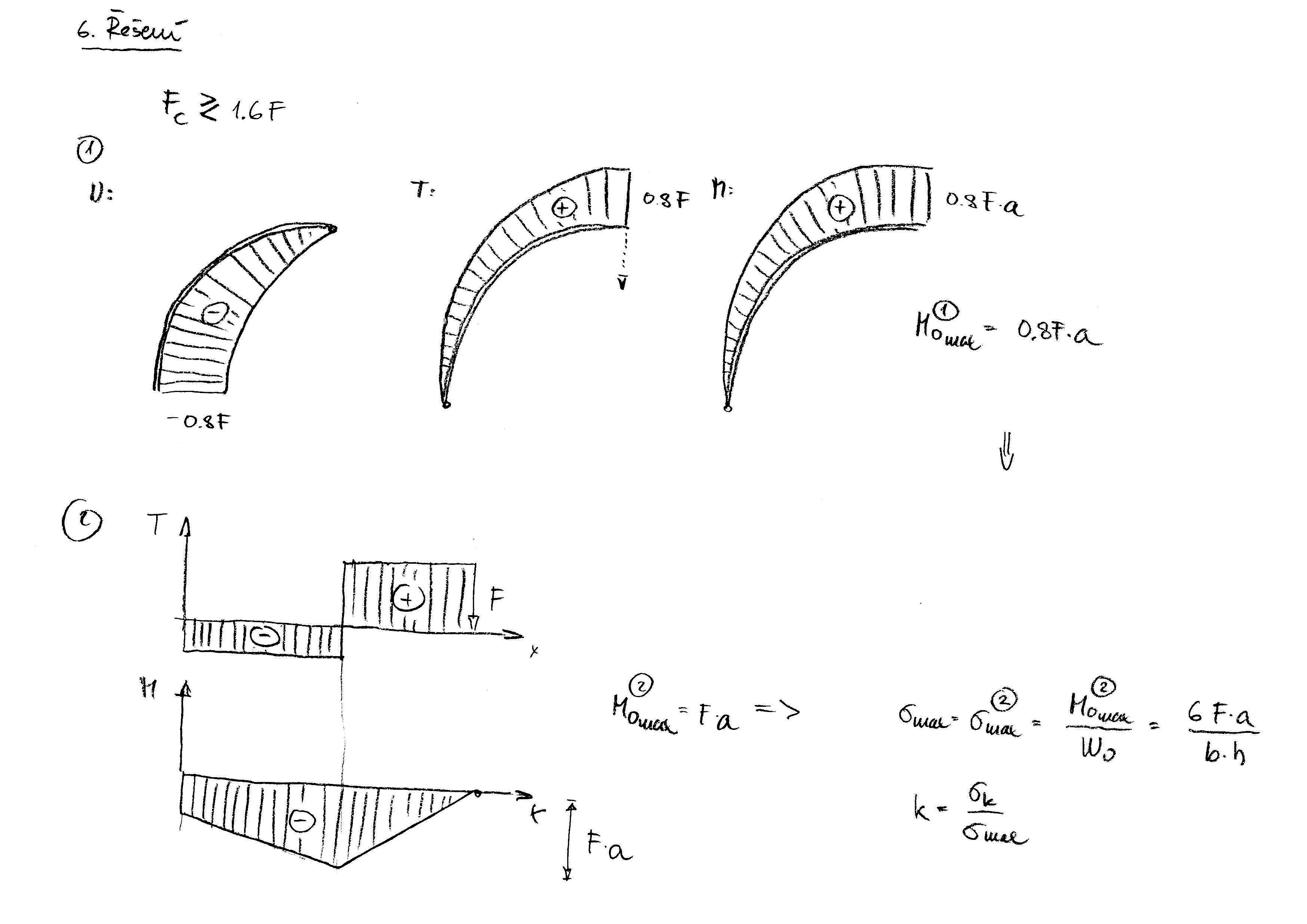
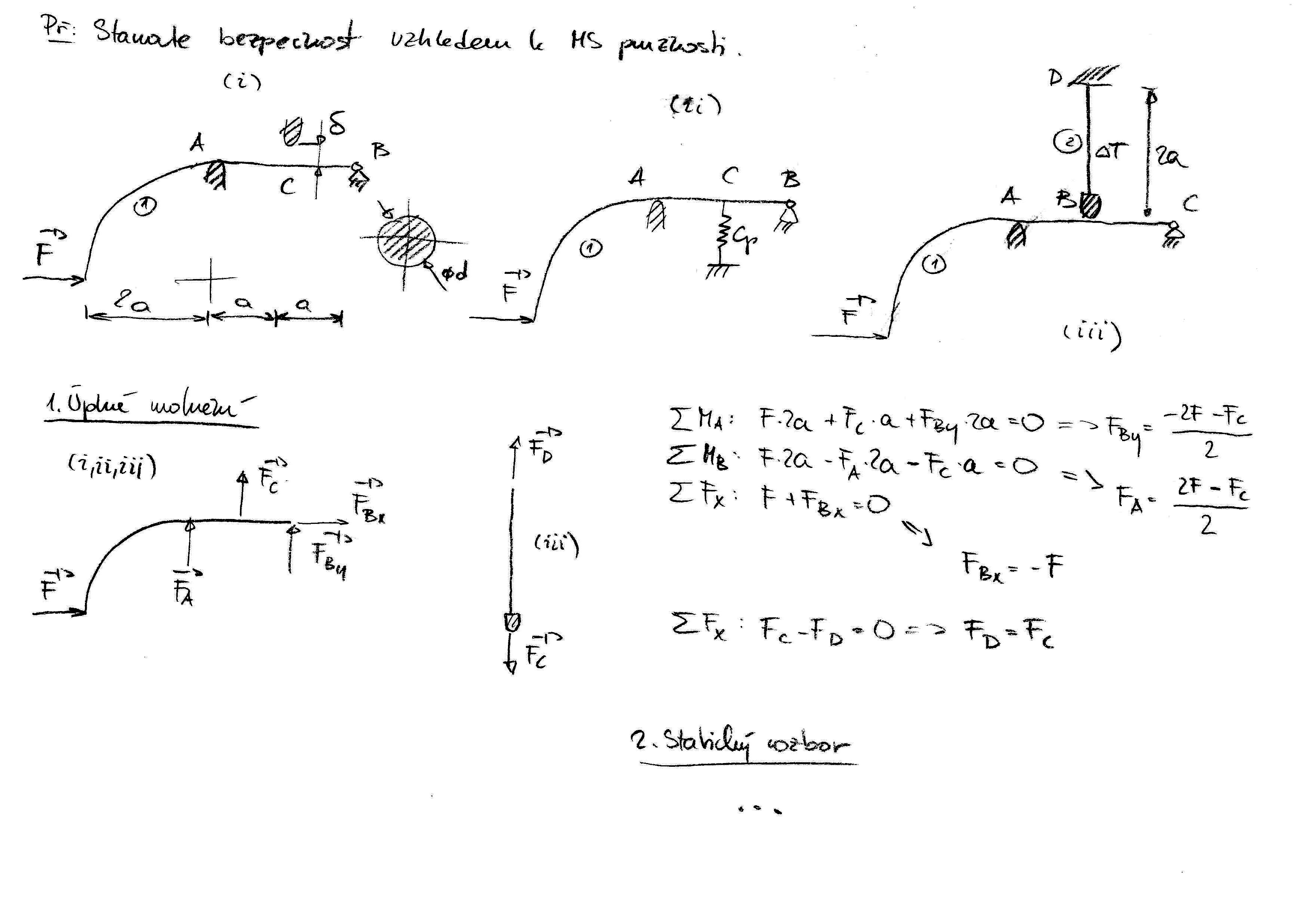
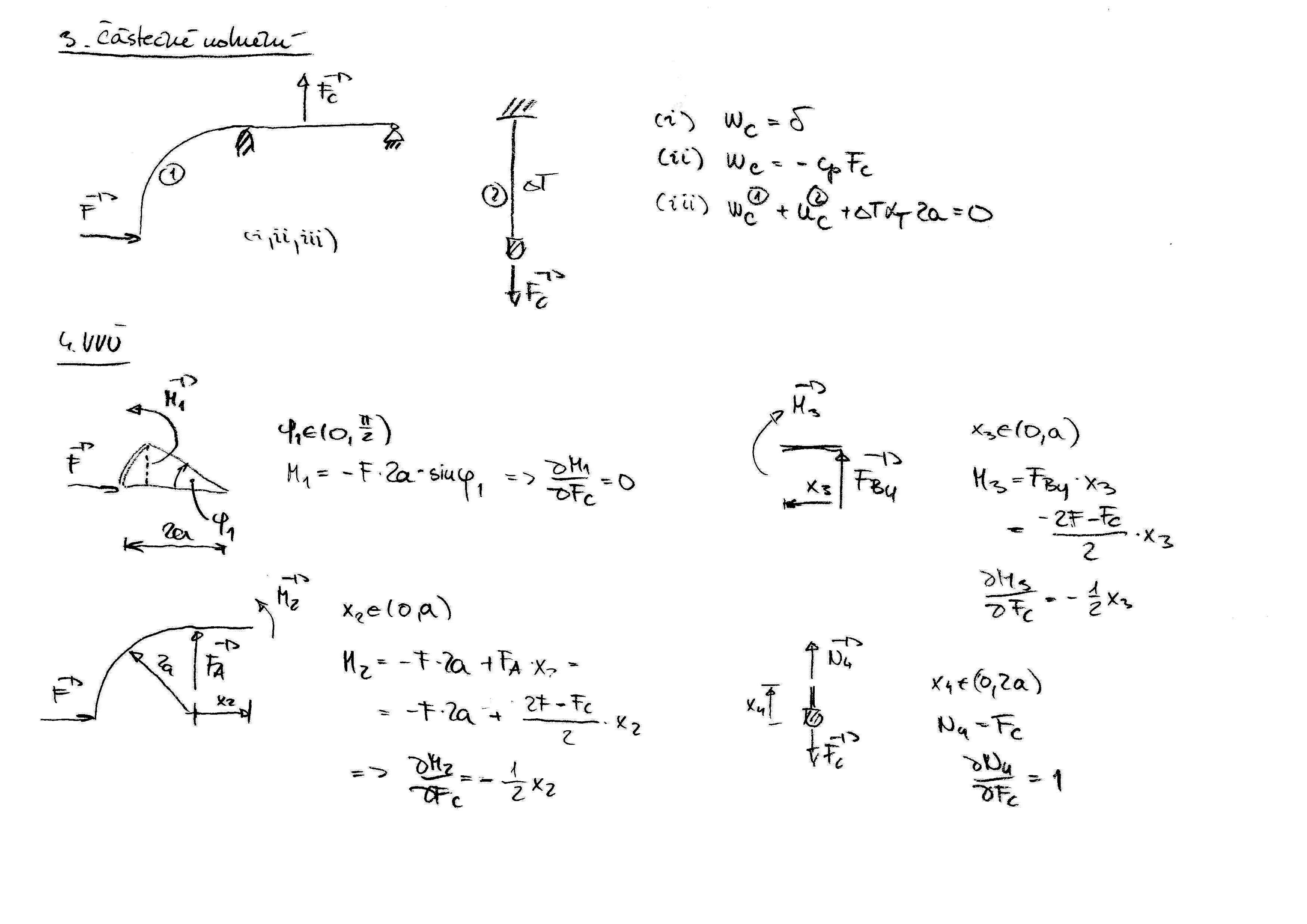
mp4,jpg,jpg,jpg,jpg,jpgPř.6, Př.7 a Př.8 - Prostý ohyb staticky neurčitě uložených zakřivených prutů:
mp4,jpg,jpg,jpg,jpg,jpg,jpgPř.9, Př.10 and Př.11 - Prostý ohyb staticky neurčitě uložených prutů:
mp4,jpg,jpg,jpg,jpg,jpg,jpg,jpg,jpg,jpg,jpg
Cvičení 10: Ohyb - průhybová čára.
Cvičení 12: Prostý krut.
Příklad v jazyce Python - Př.1. Odpovídající soubor v Jupyteru lze stáhnout
zde. Obrázky lze stáhnoutzdeazde.Příklad v jazyce Python - Př.2. Odpovídající soubor v Jupyteru lze stáhnout
zde.Krut prizmatického prutu obdélníkového průřezu - ukázka numerického výpočtu krutu pomocí metody konečných prvků. Příklad v jazyce Python - Př.3. Odpovídající soubor v Jupyteru se může stáhnout
zdea k němu nutné nutné datové soubory lze stáhnoutzde,zde,zde,zdeazde.Ručně řešené příklady lze stáhnout
zde.
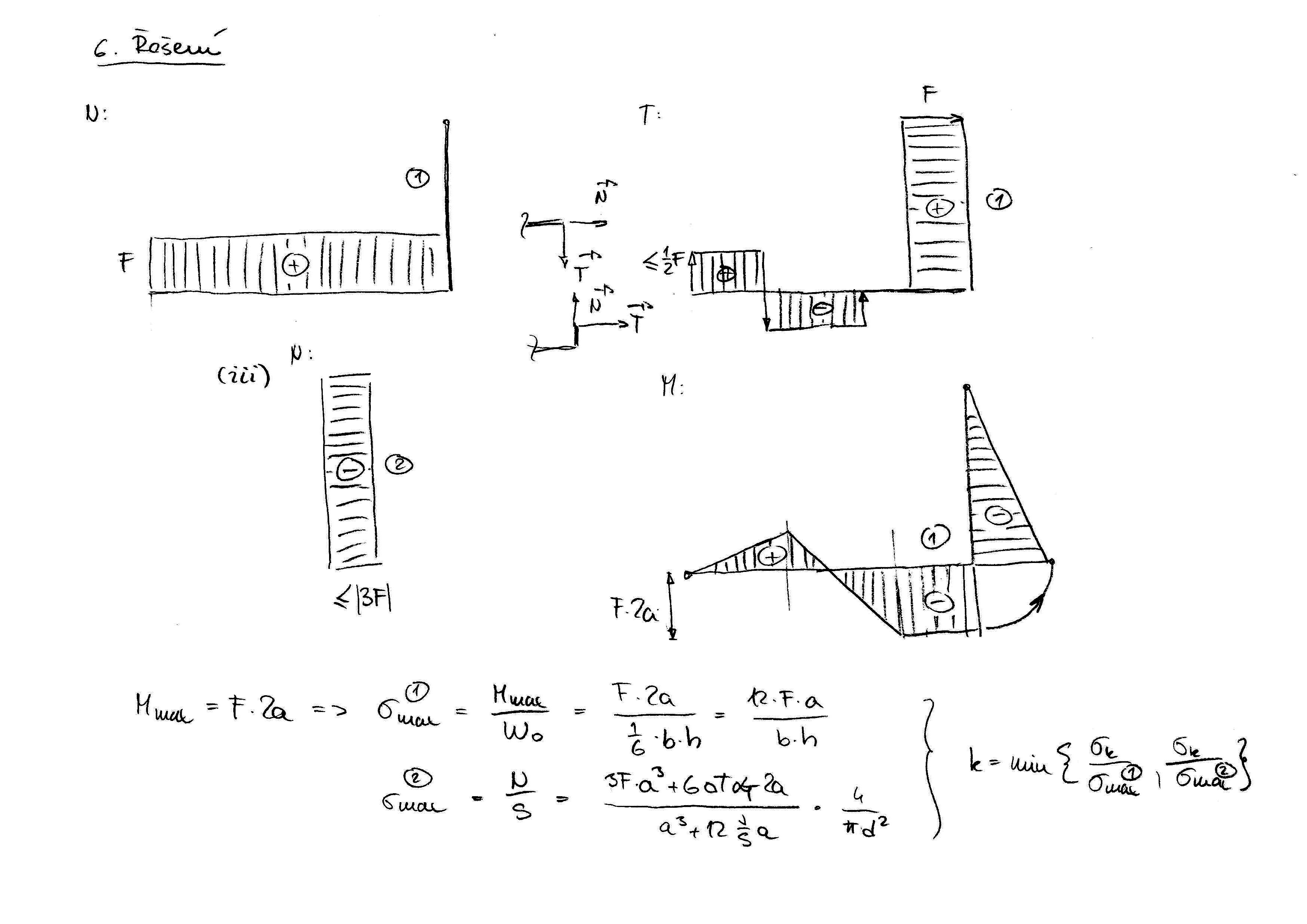
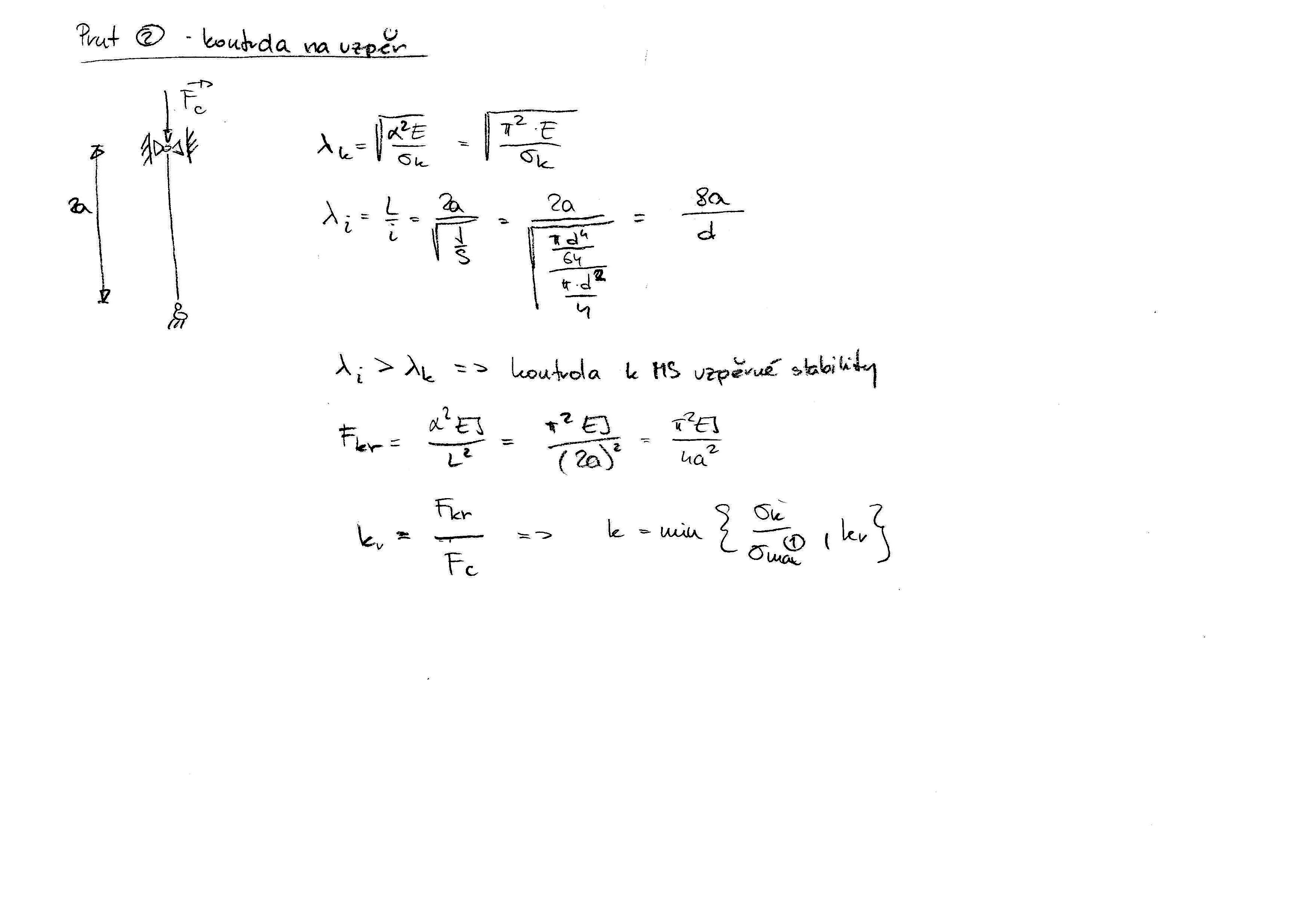
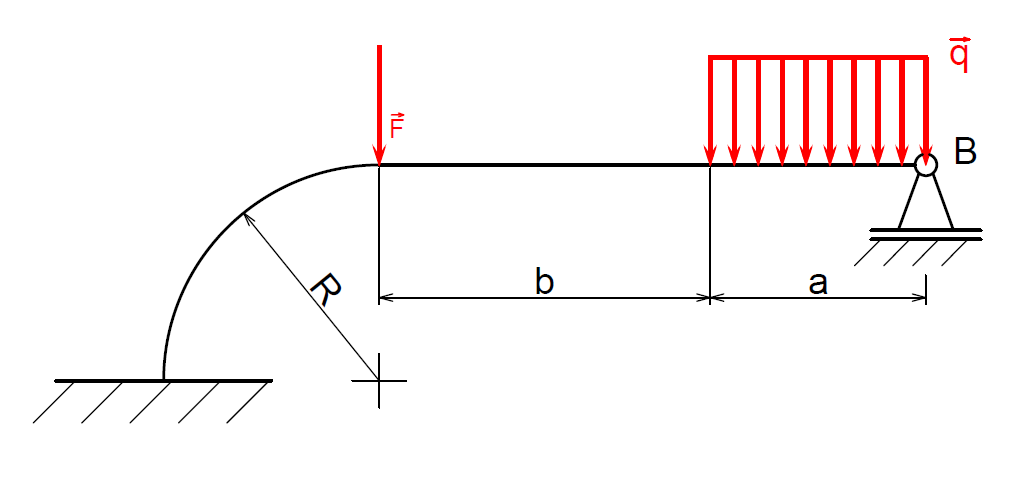
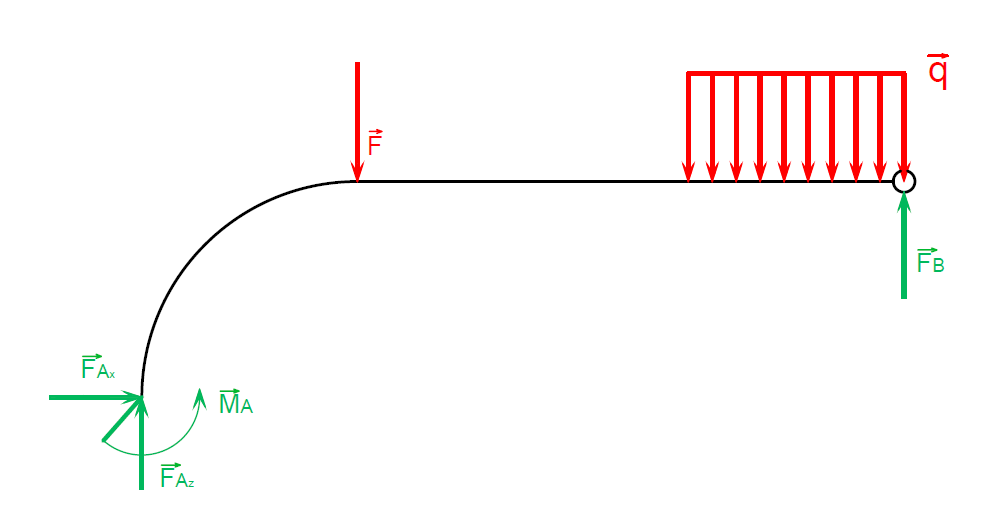
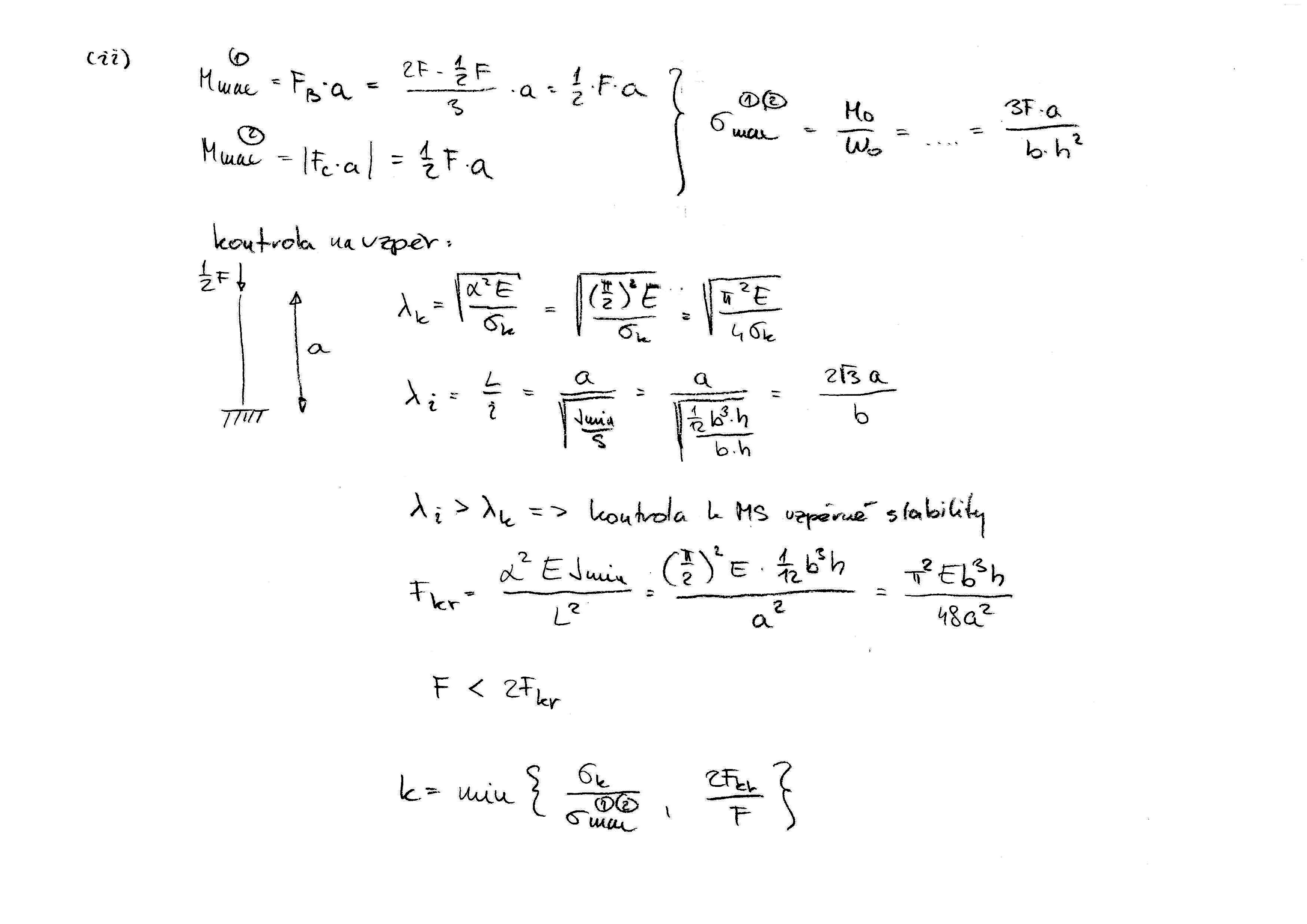
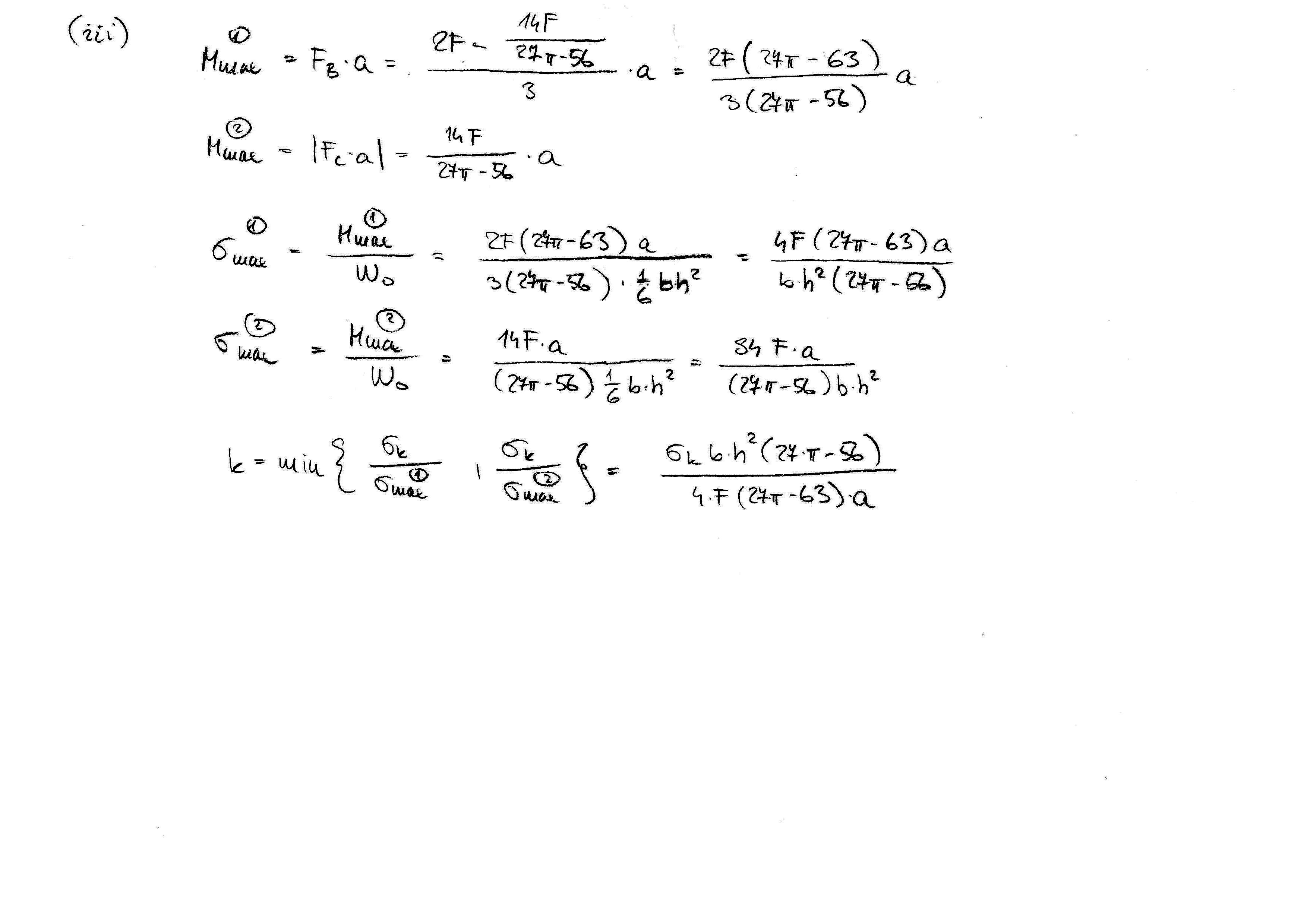
Cvičení 13: Kombinované namáhání a vzpěr.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Pružnost a pevnost I-K¶
Požadavky ke zkoušce¶
Uvedené body jsou orientační, mohou být modifikovány.
Test (40 bodů) - vychází se z učebního textu, který lze stáhnout zde.
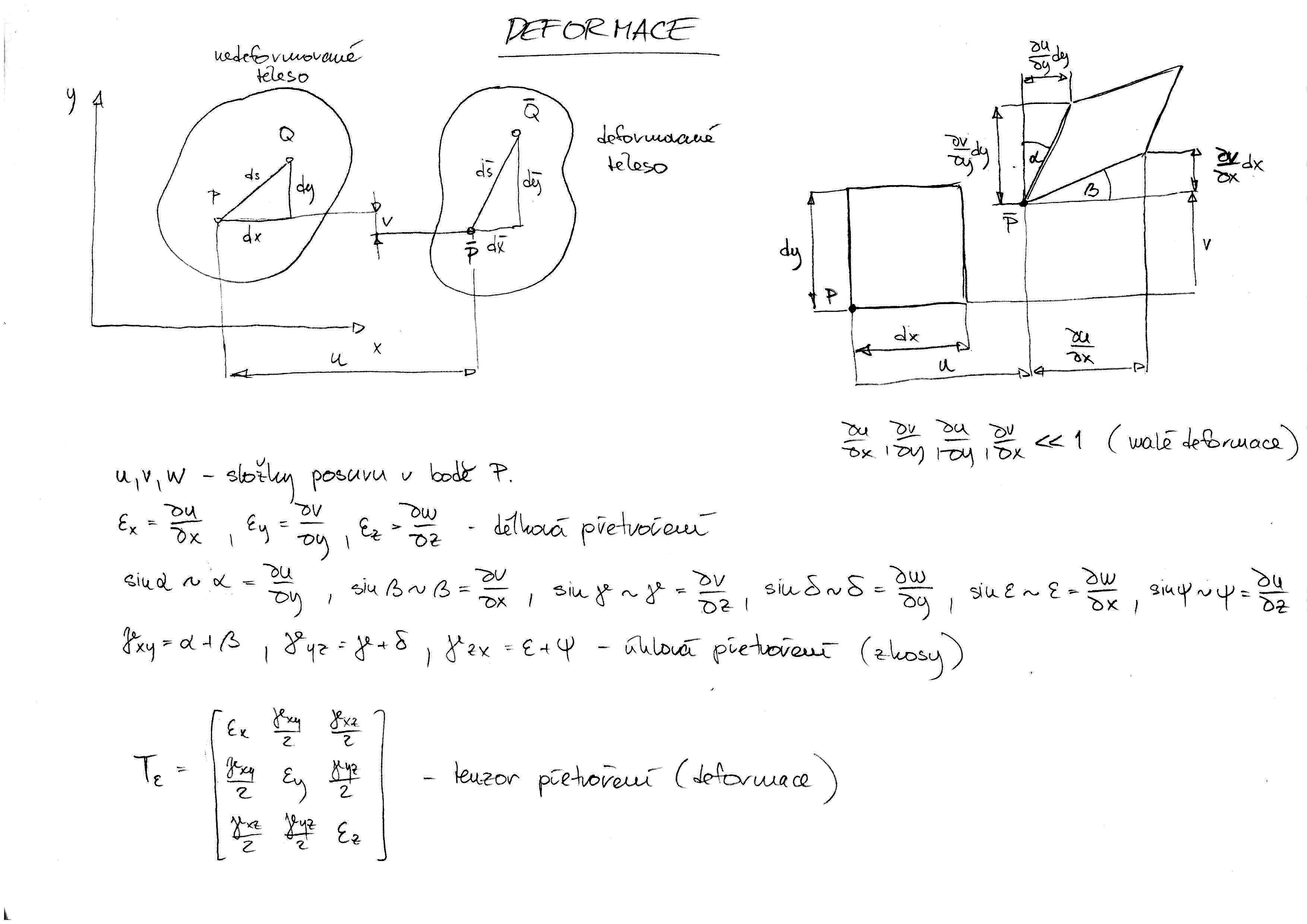
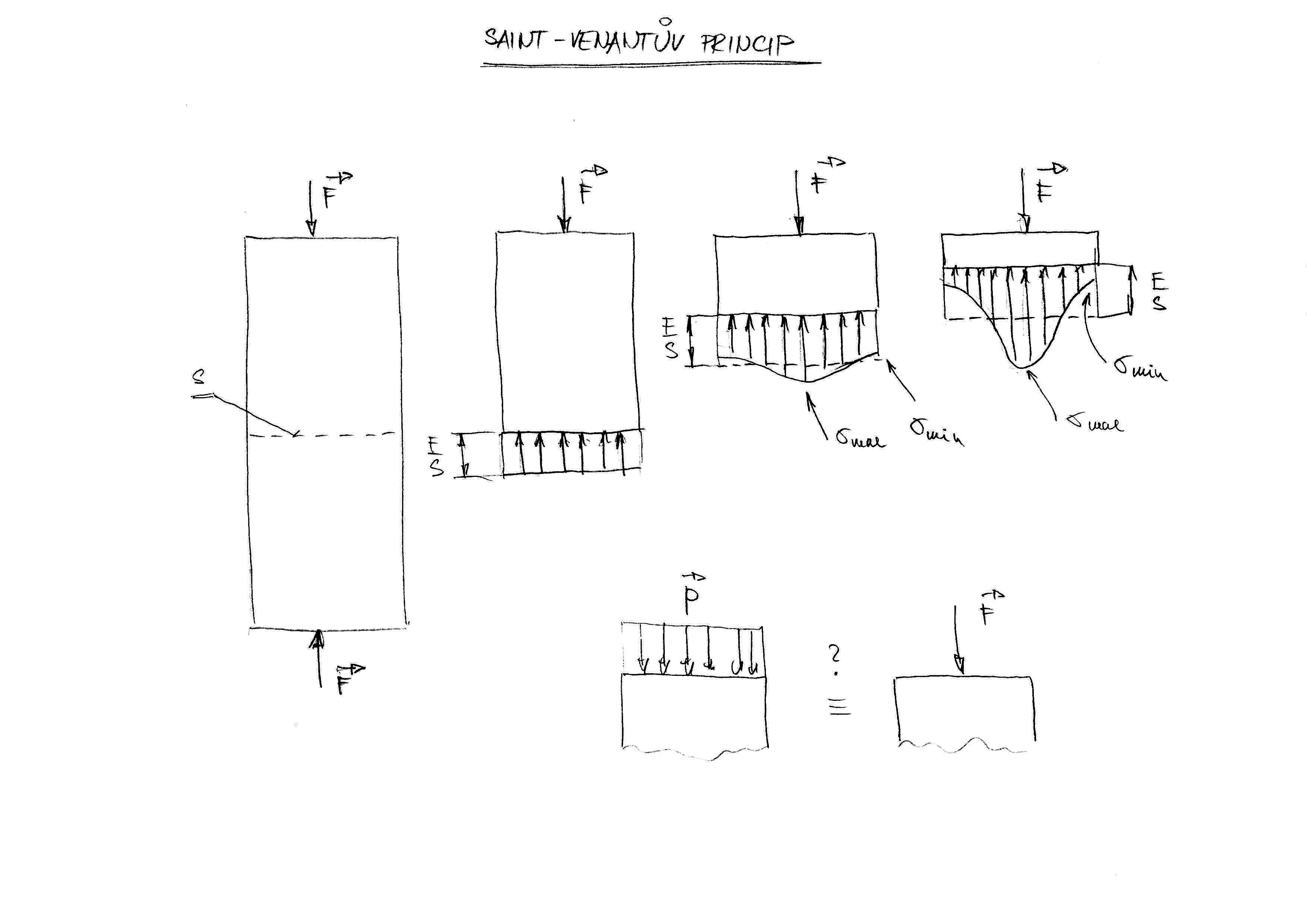
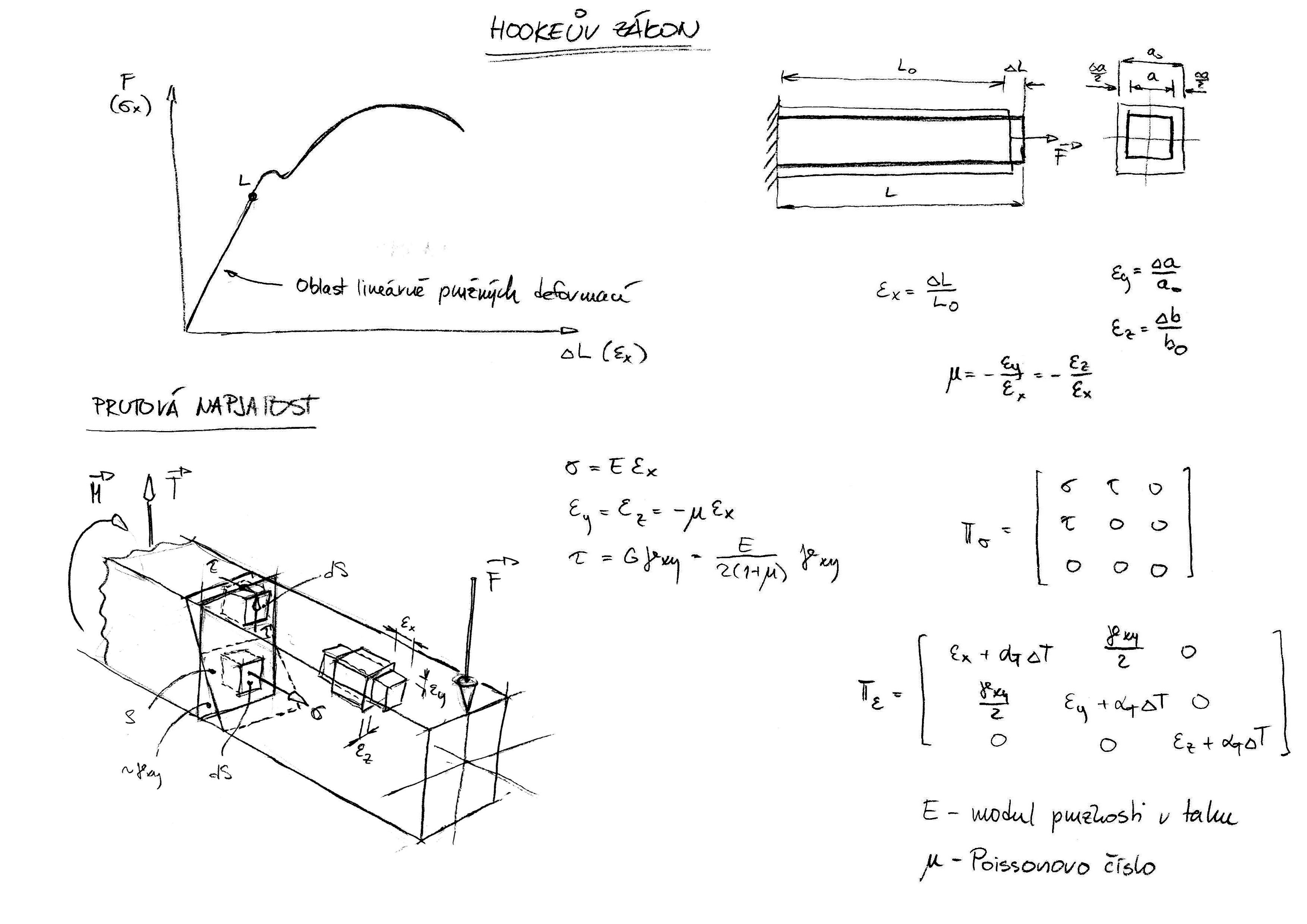
Základní pojmy (viz str. 3) - deformace tělesa (obrázky na str. 3, 5, vztahy 2.1, 2.2, 2.3), napjatost v bodě tělesa (vše str. 7-8), Saint-Venantův princip (str. 14).
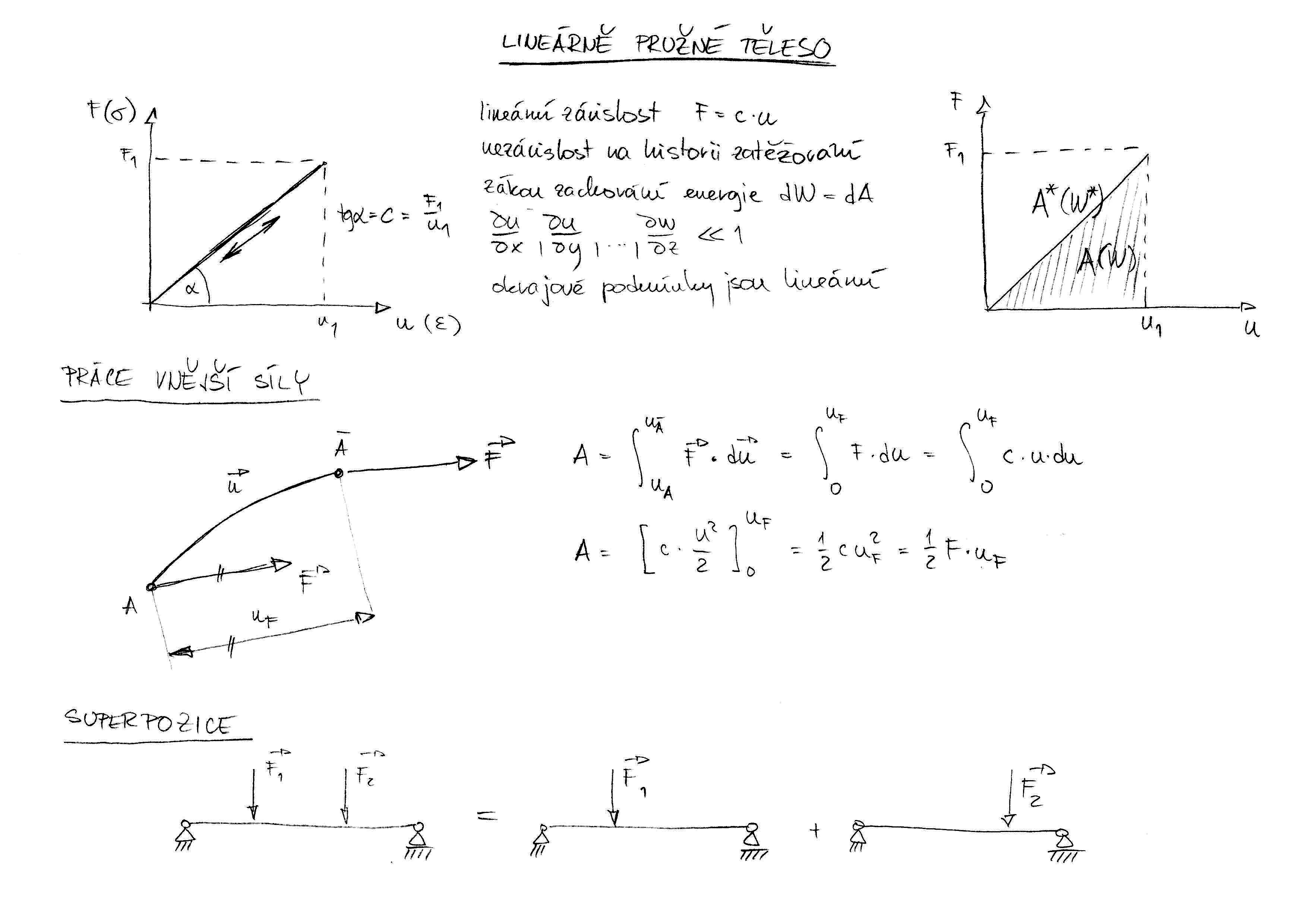
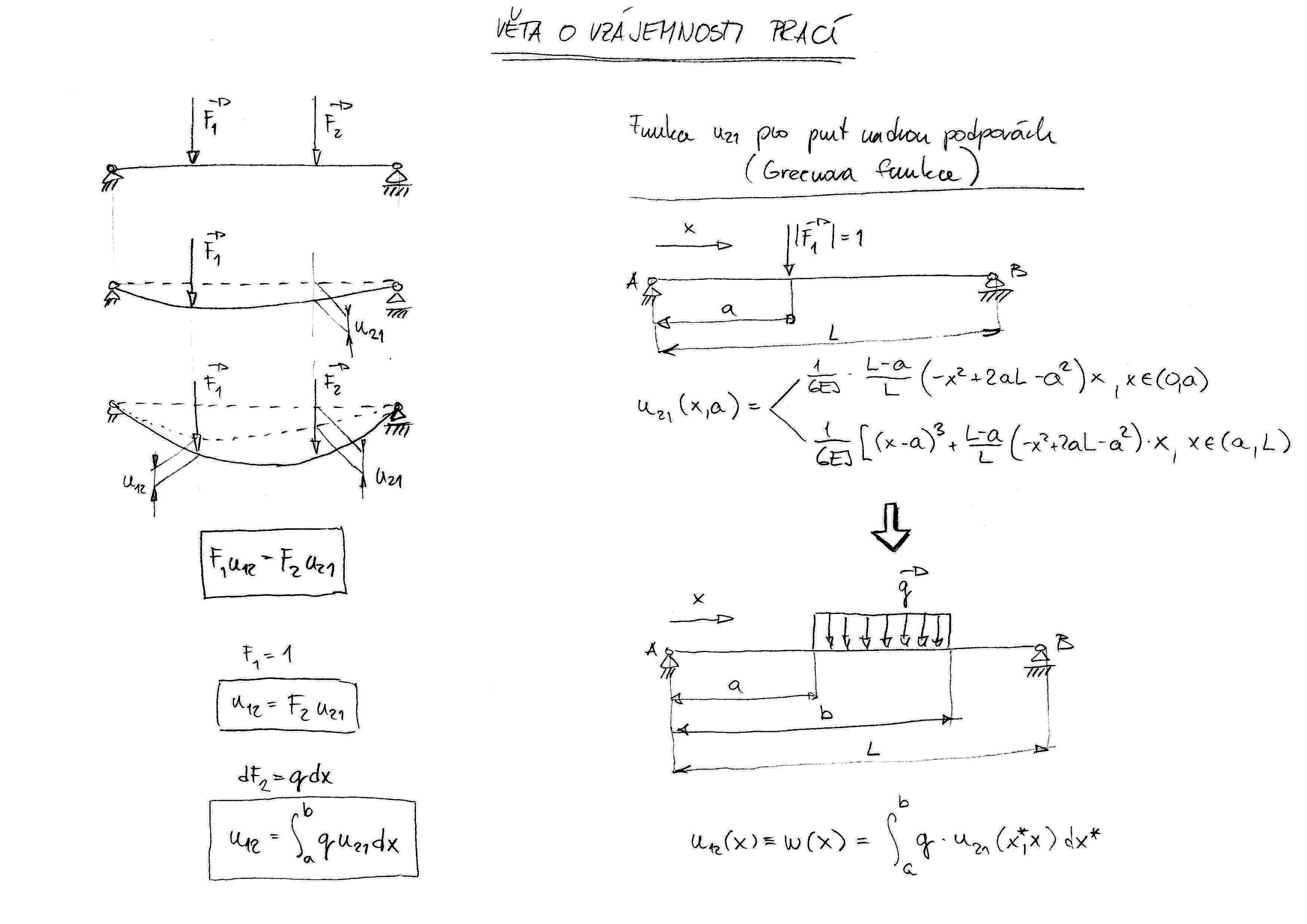
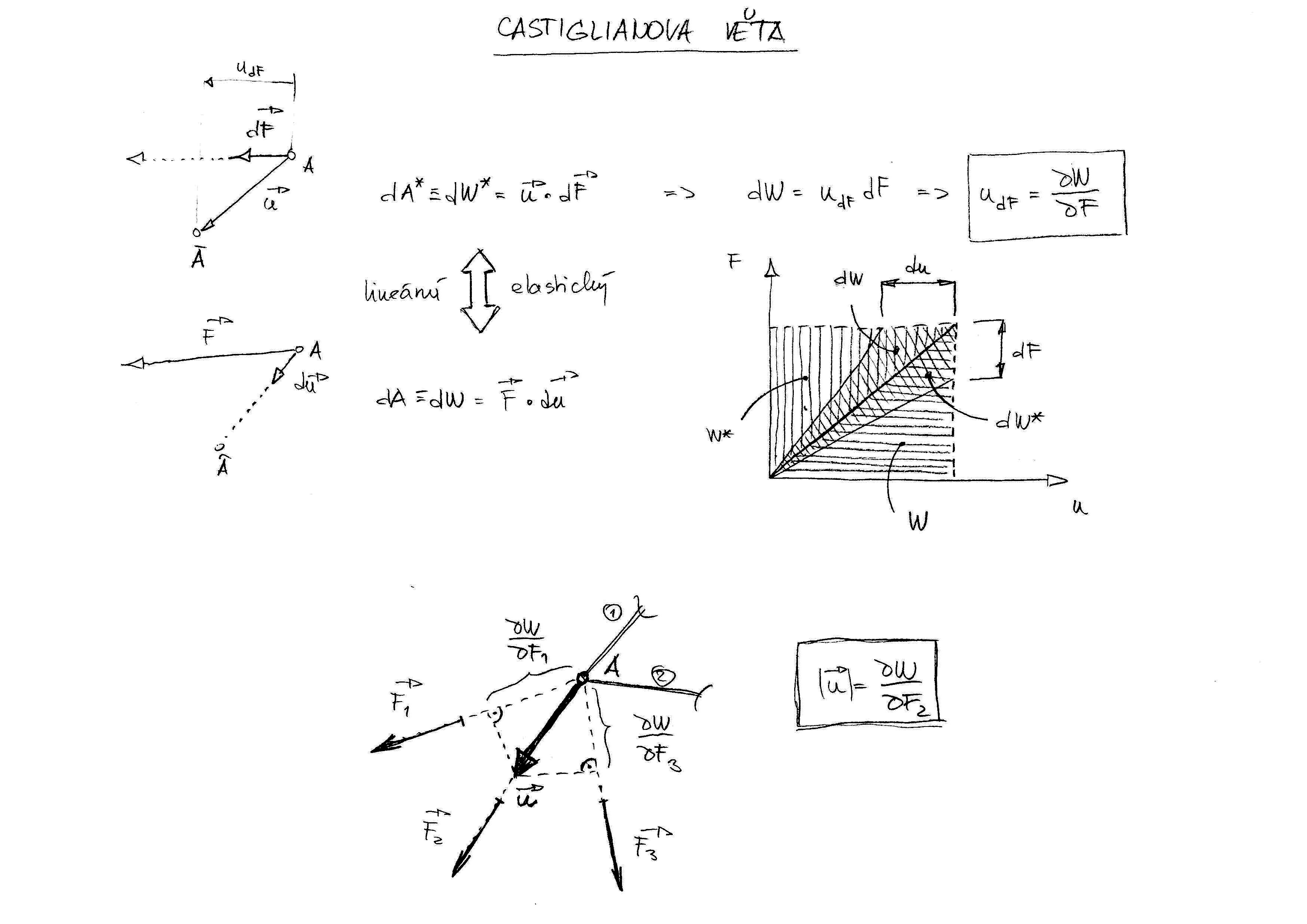
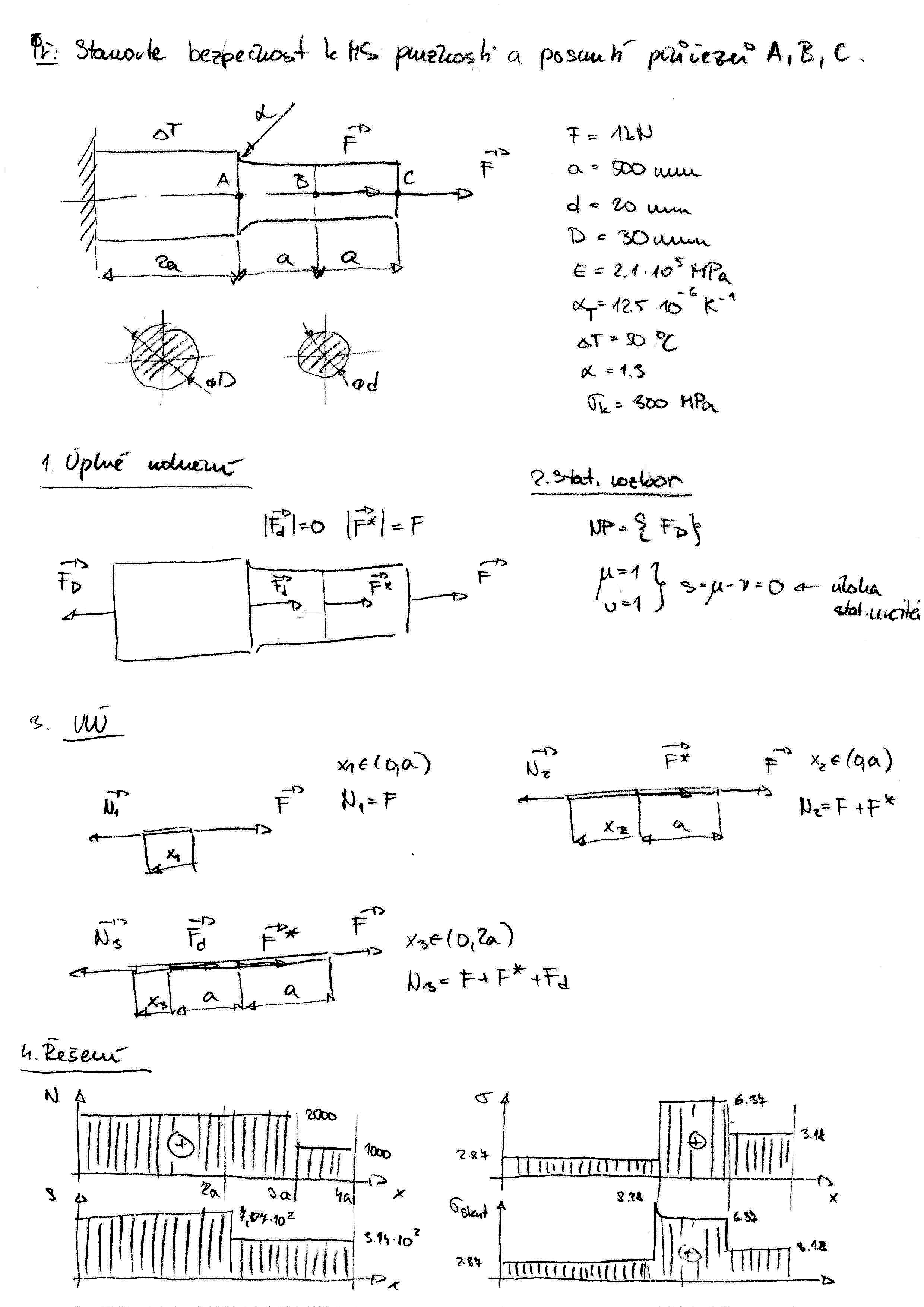
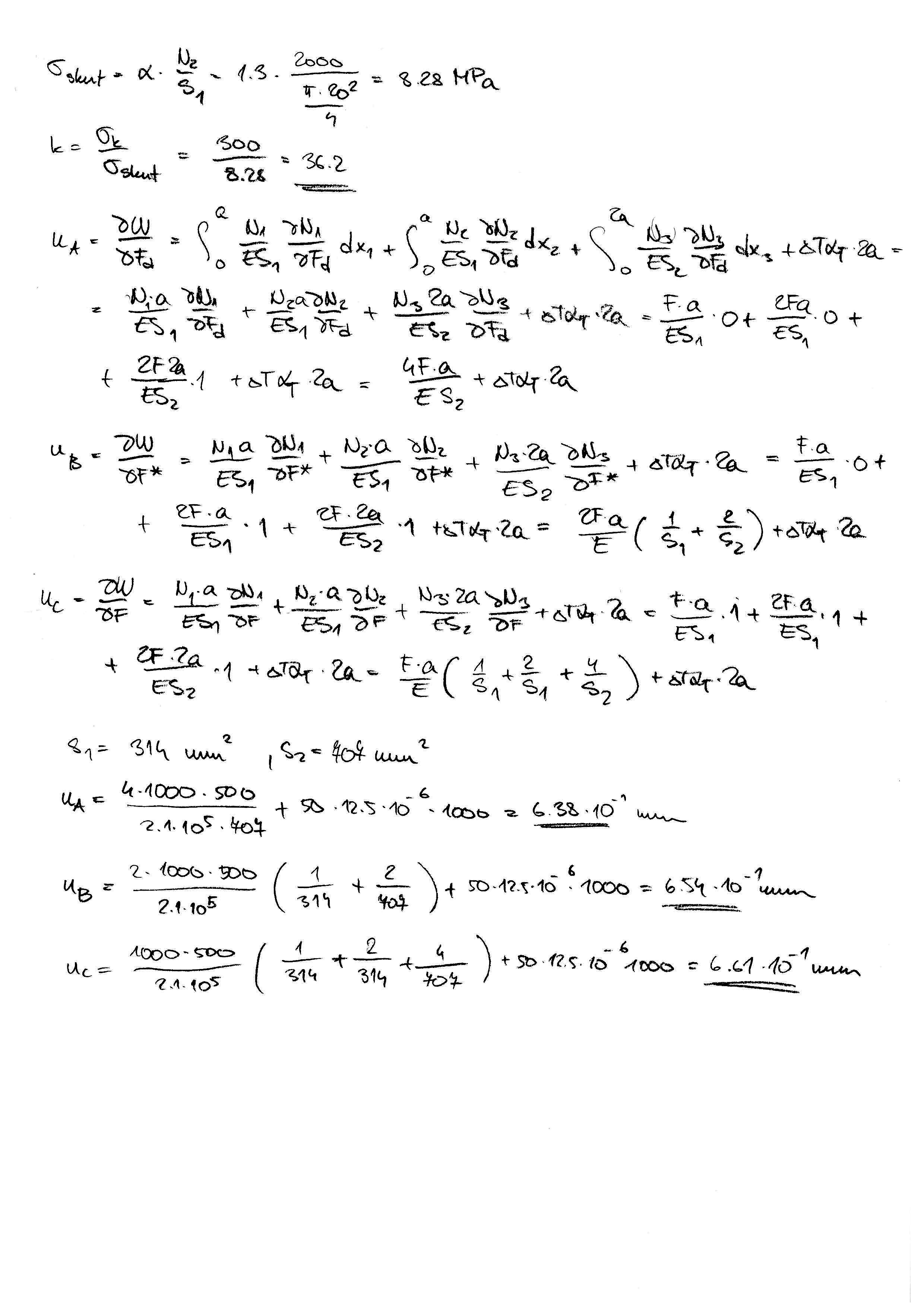
Obecné vlastnosti a obecné věty lineárně pružného tělesa (viz str. 23) - obrázky, vztahy a pojmy ze str. 23-24, deformační práce osamělé síly, věta o superpozici (str.25), věta o vzájemnosti prací (str 27 - vztah 3.6, slovní formulace), deformační práce silové dvojice (str. 28), věta o deformační práci silové soustavy (str. 29).
Základní materiálové charakteristiky, tahová a tlaková zkouška (viz str. 35) - Poissonovo číslo (vztah 4.3, 4.5), Hookeův zákon (vztah 4.4). (Přestože v testu nebude vyžadován, doporučuji se seznámit s součinitelem \(\kappa\) (vztah 4.8)).
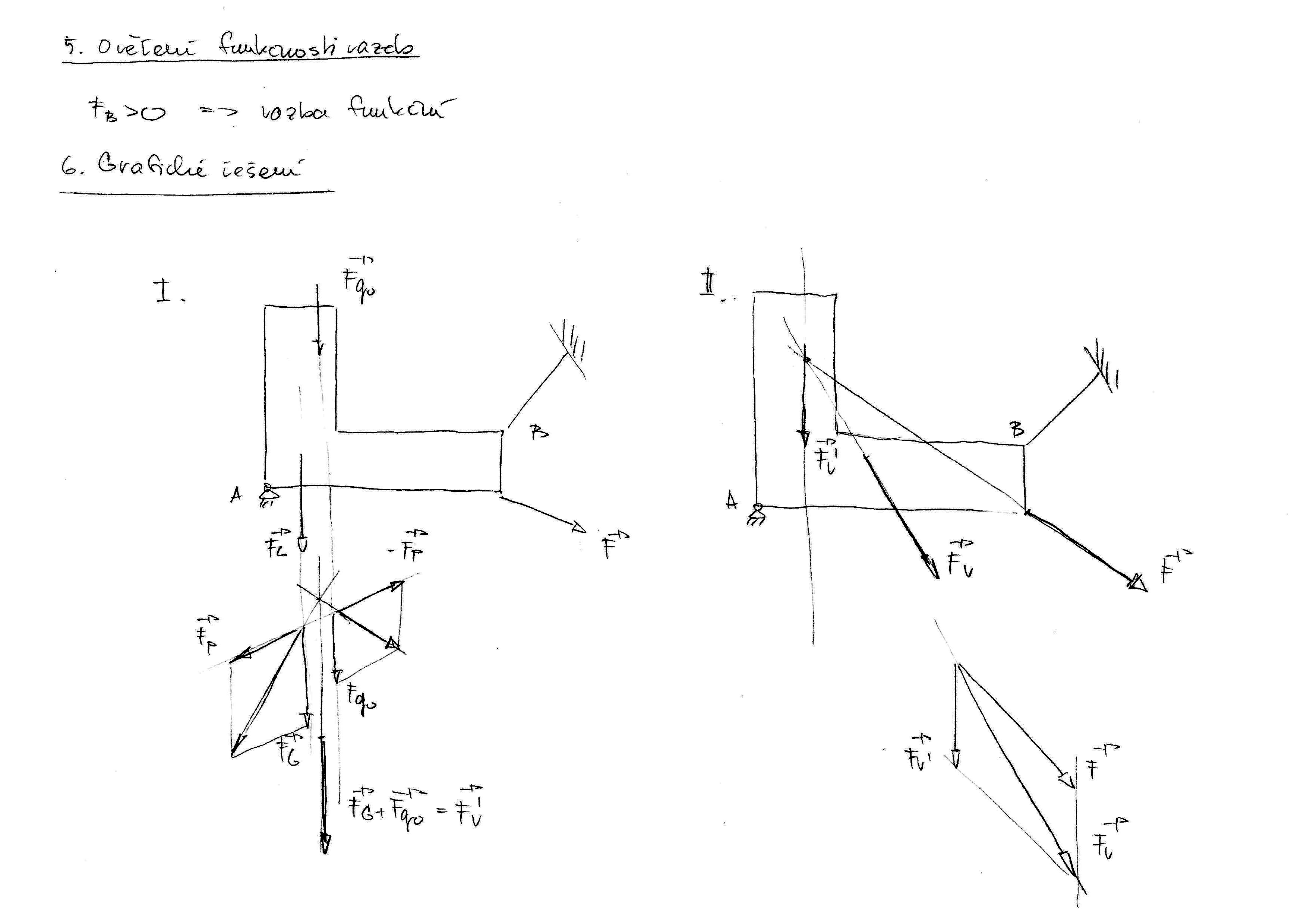
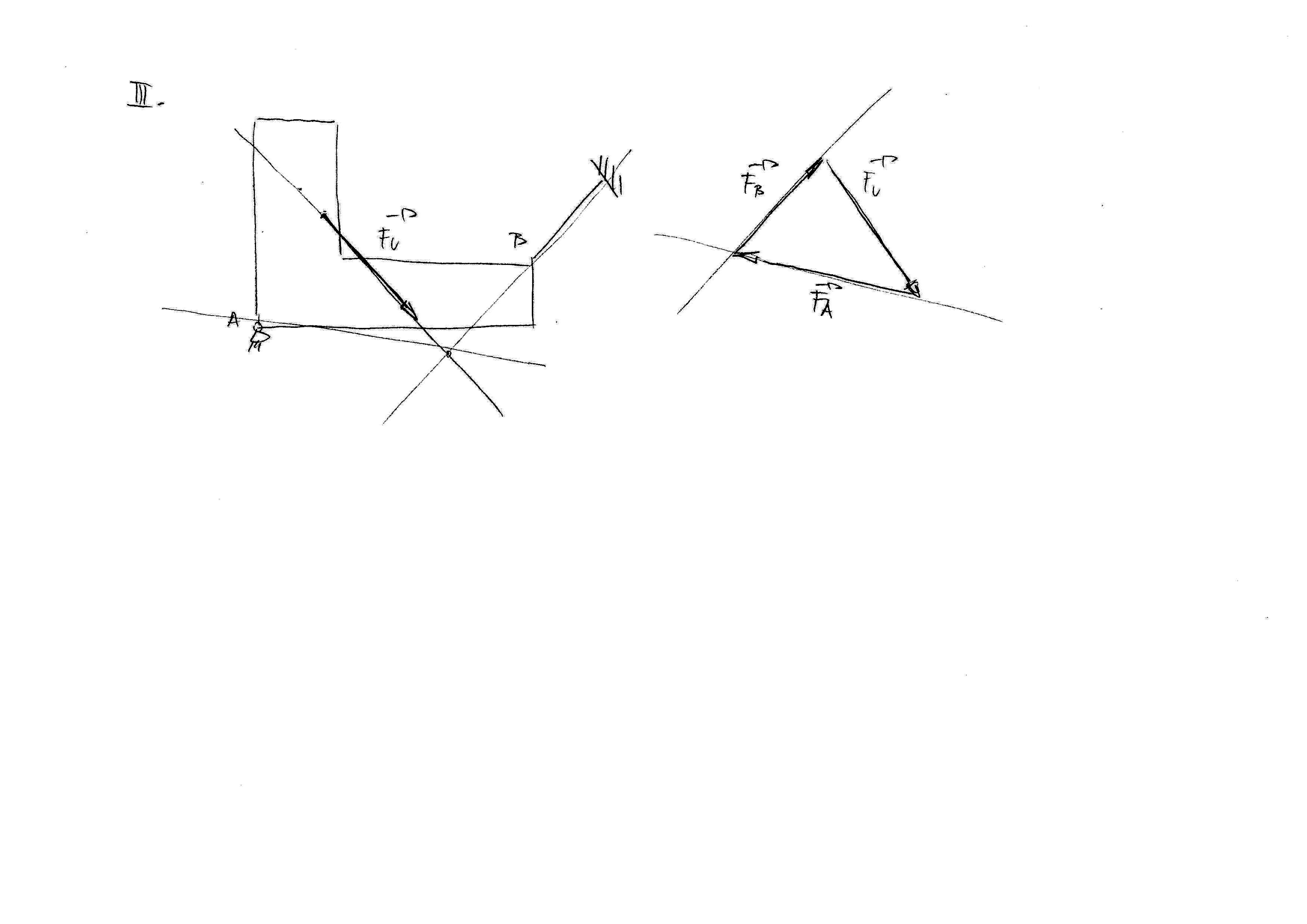
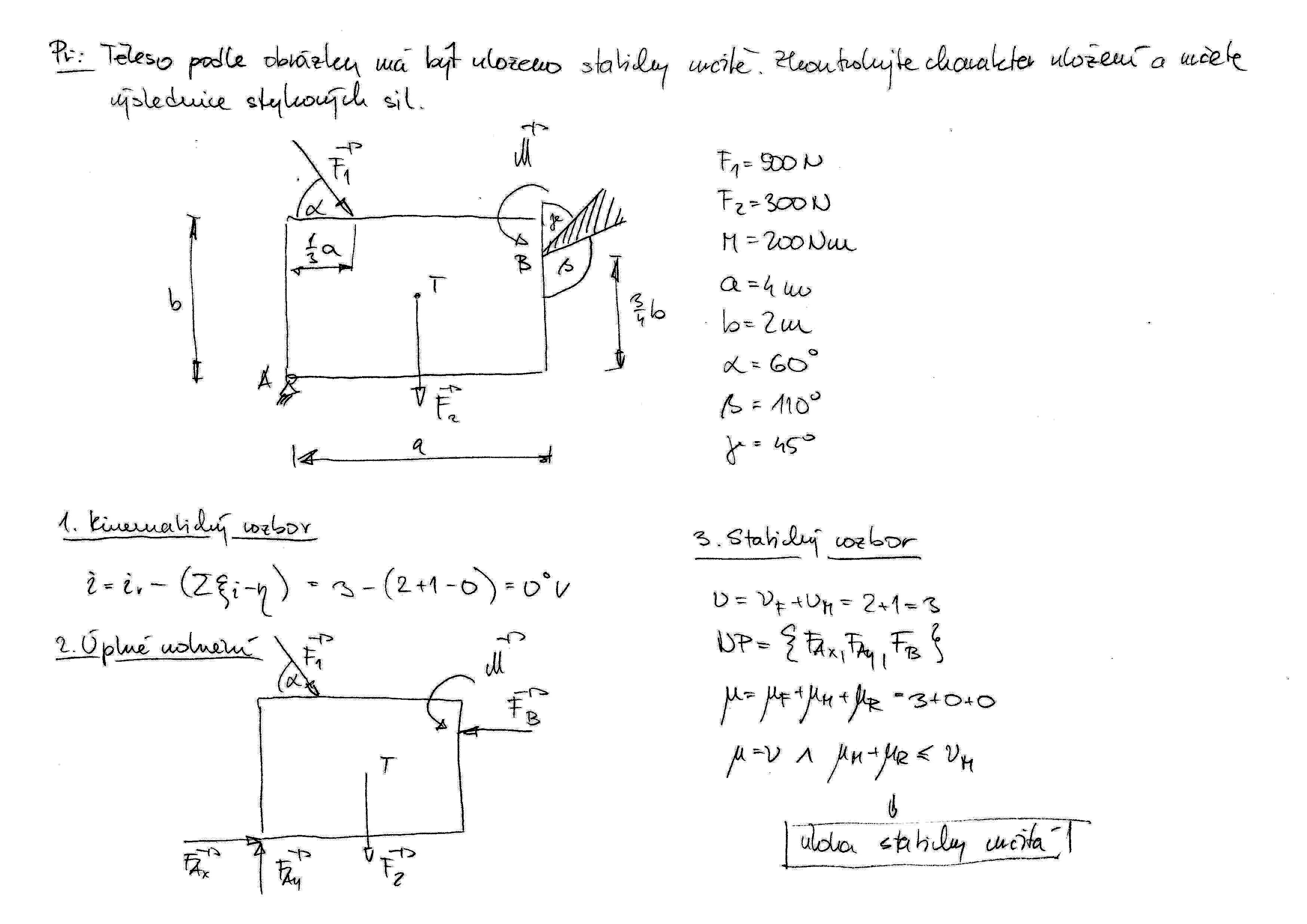
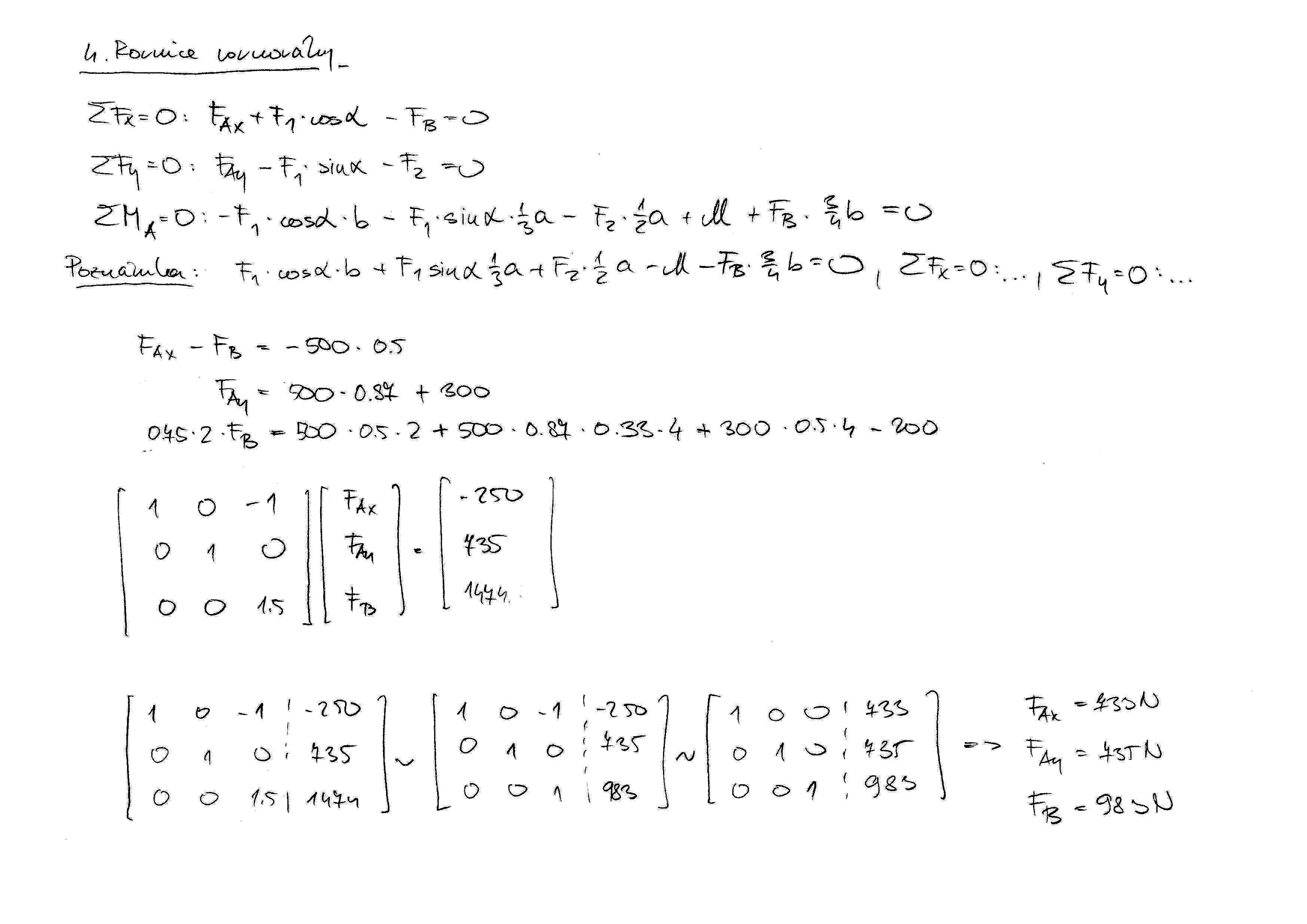
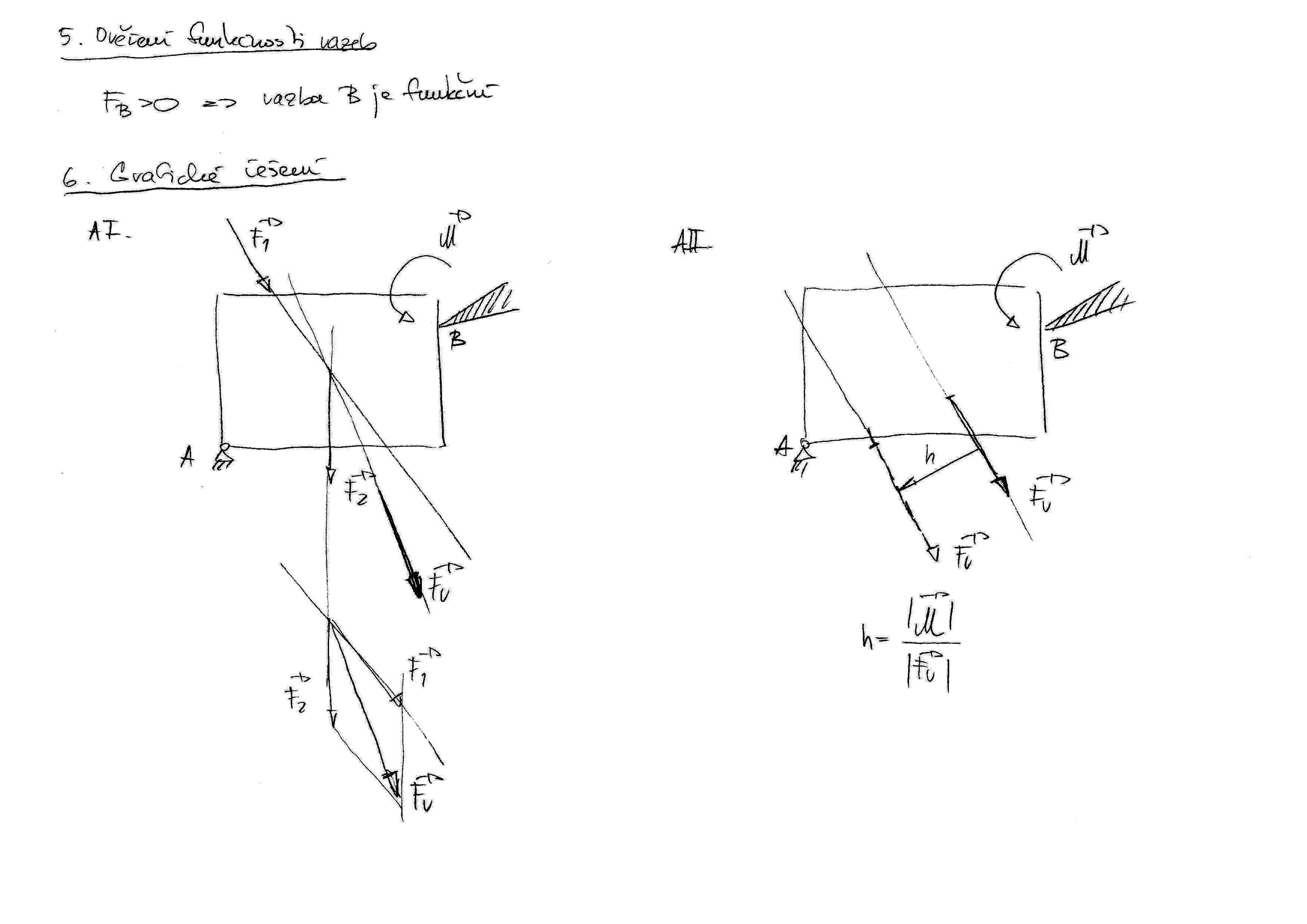
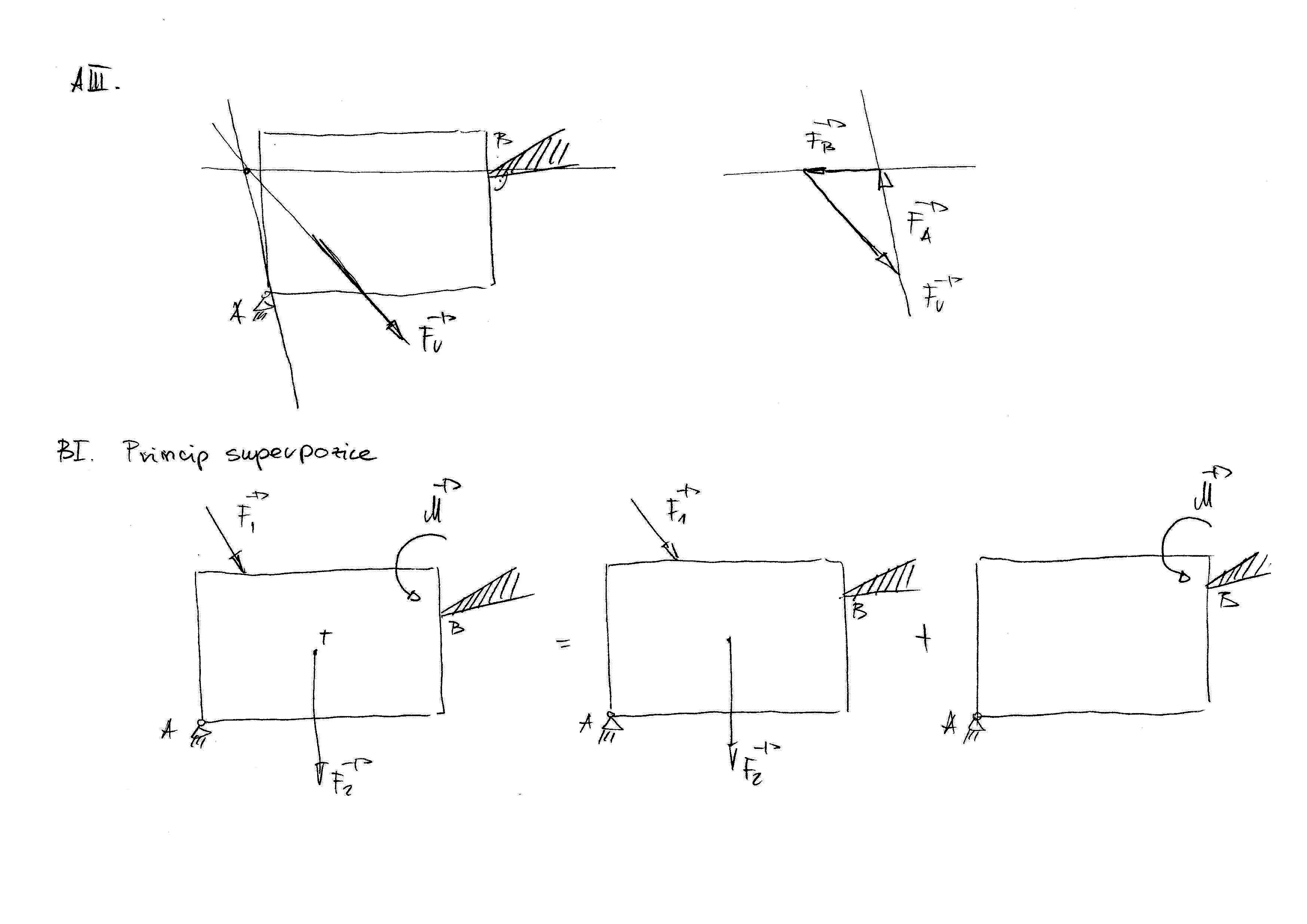
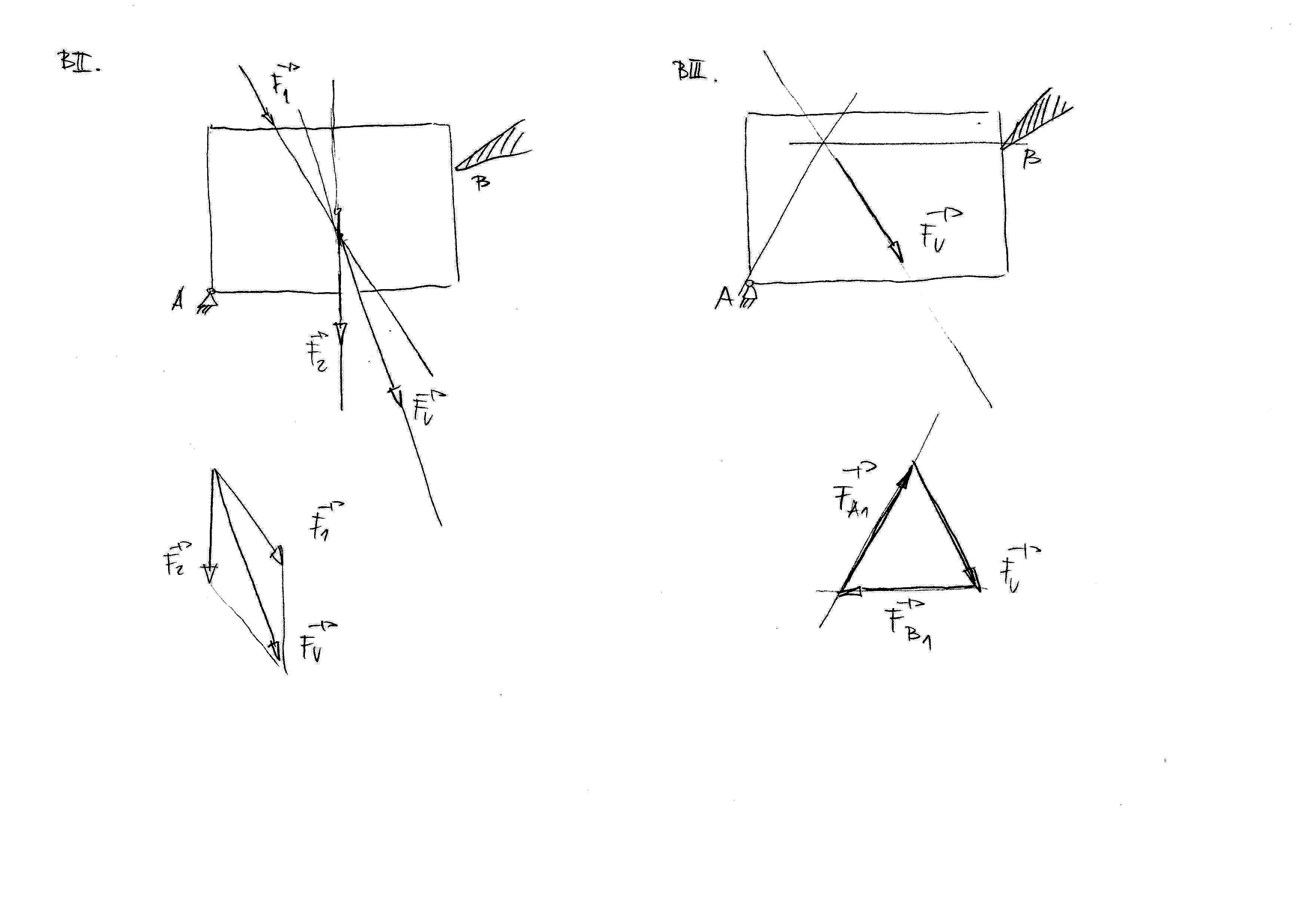
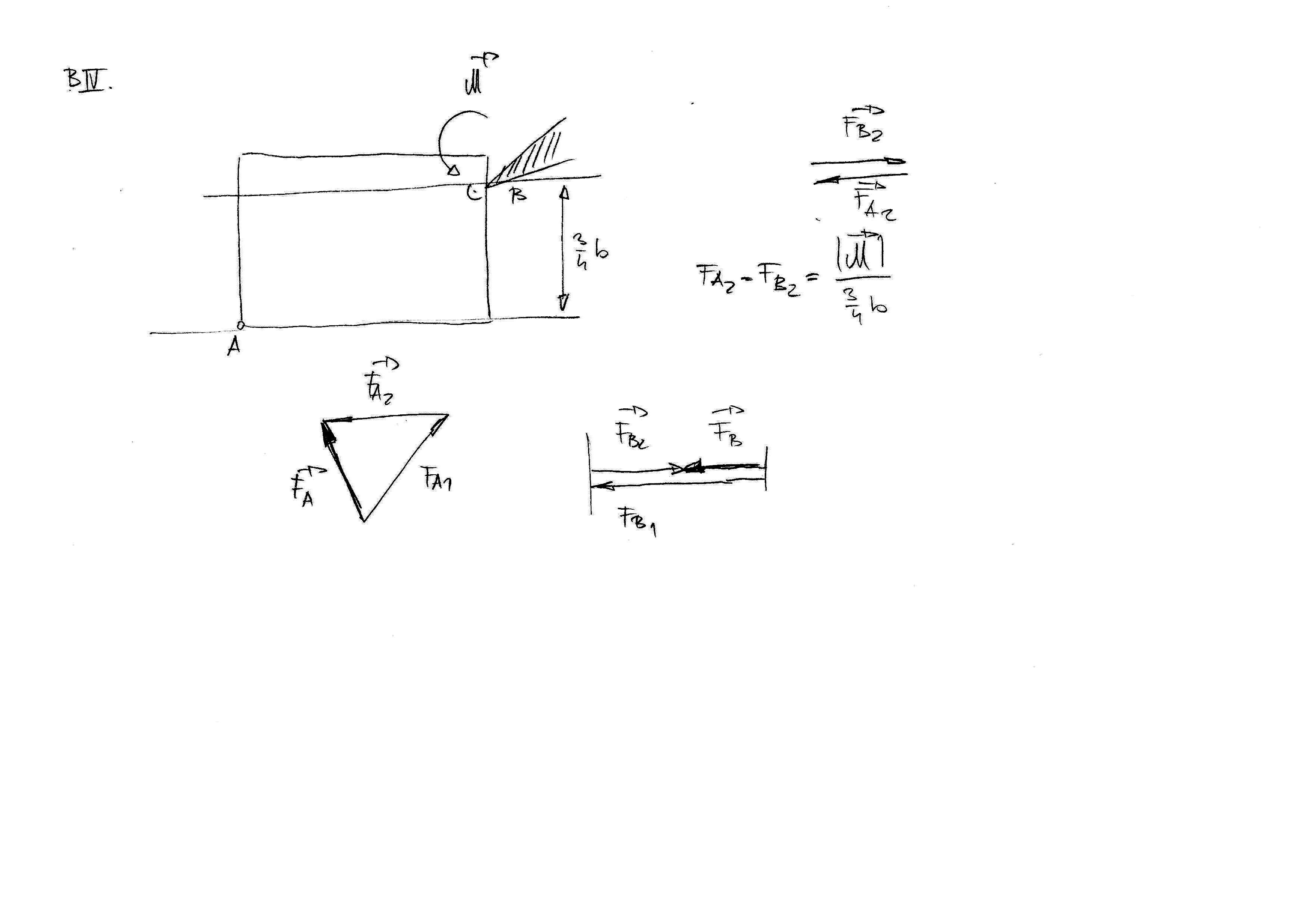
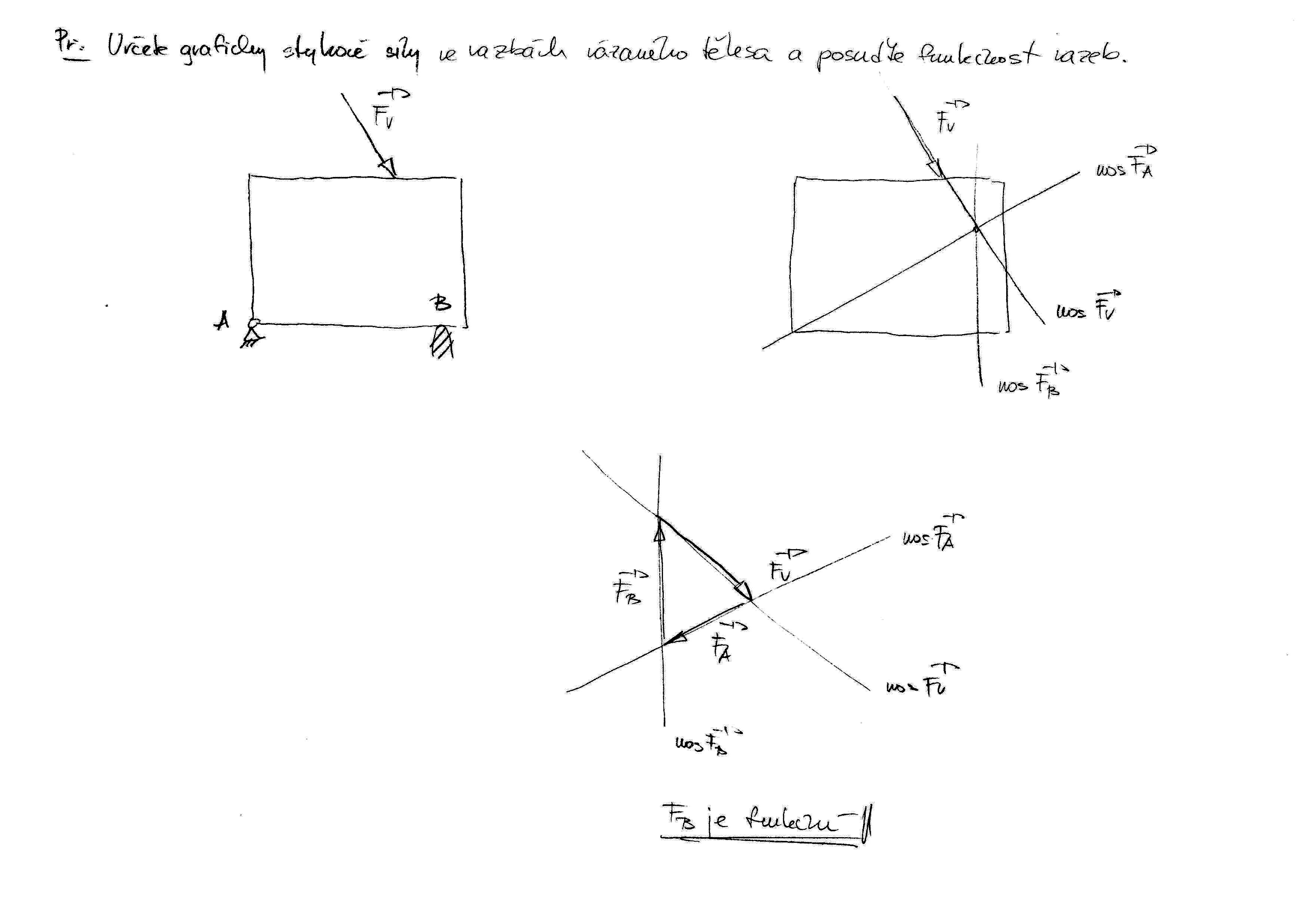
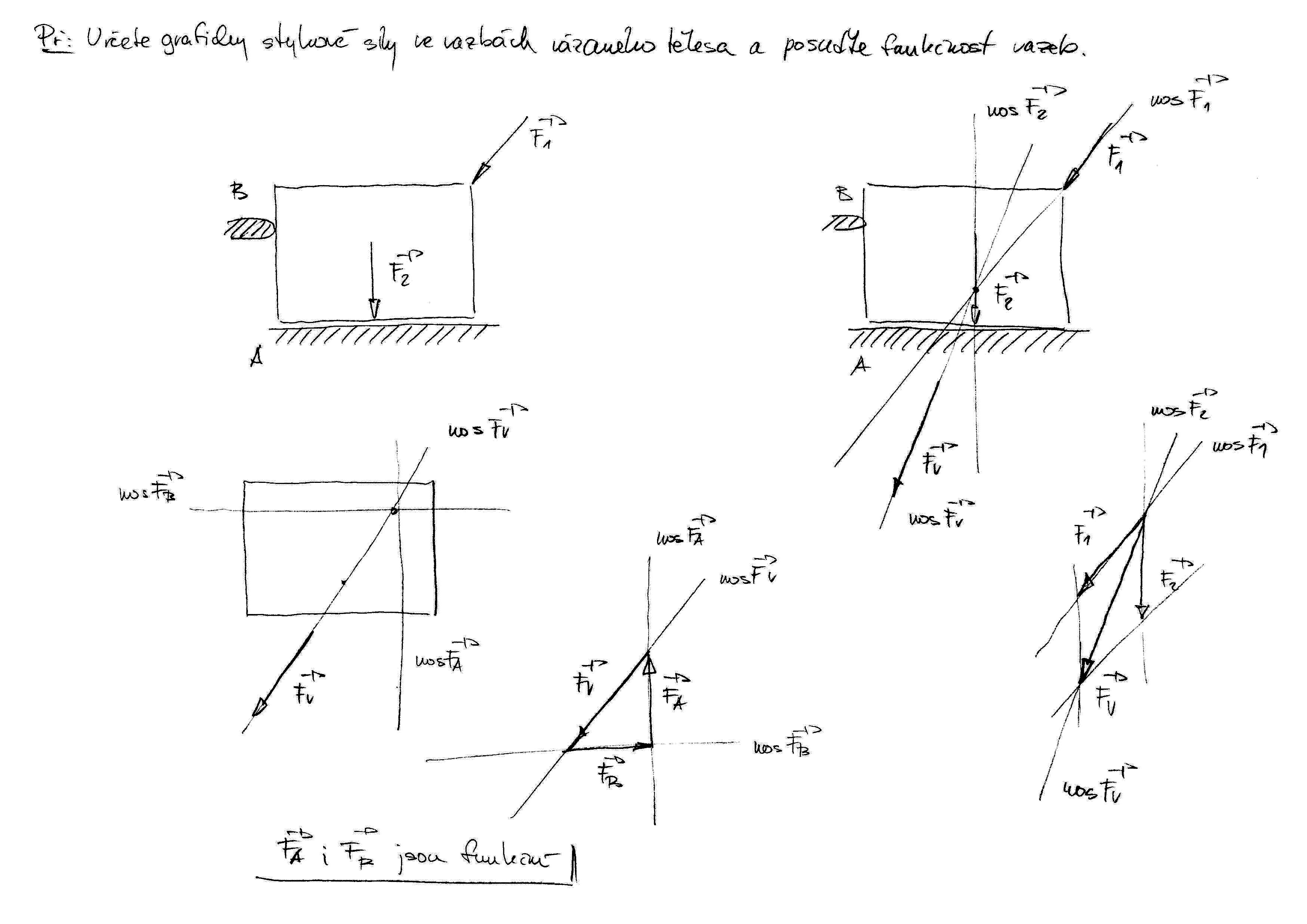
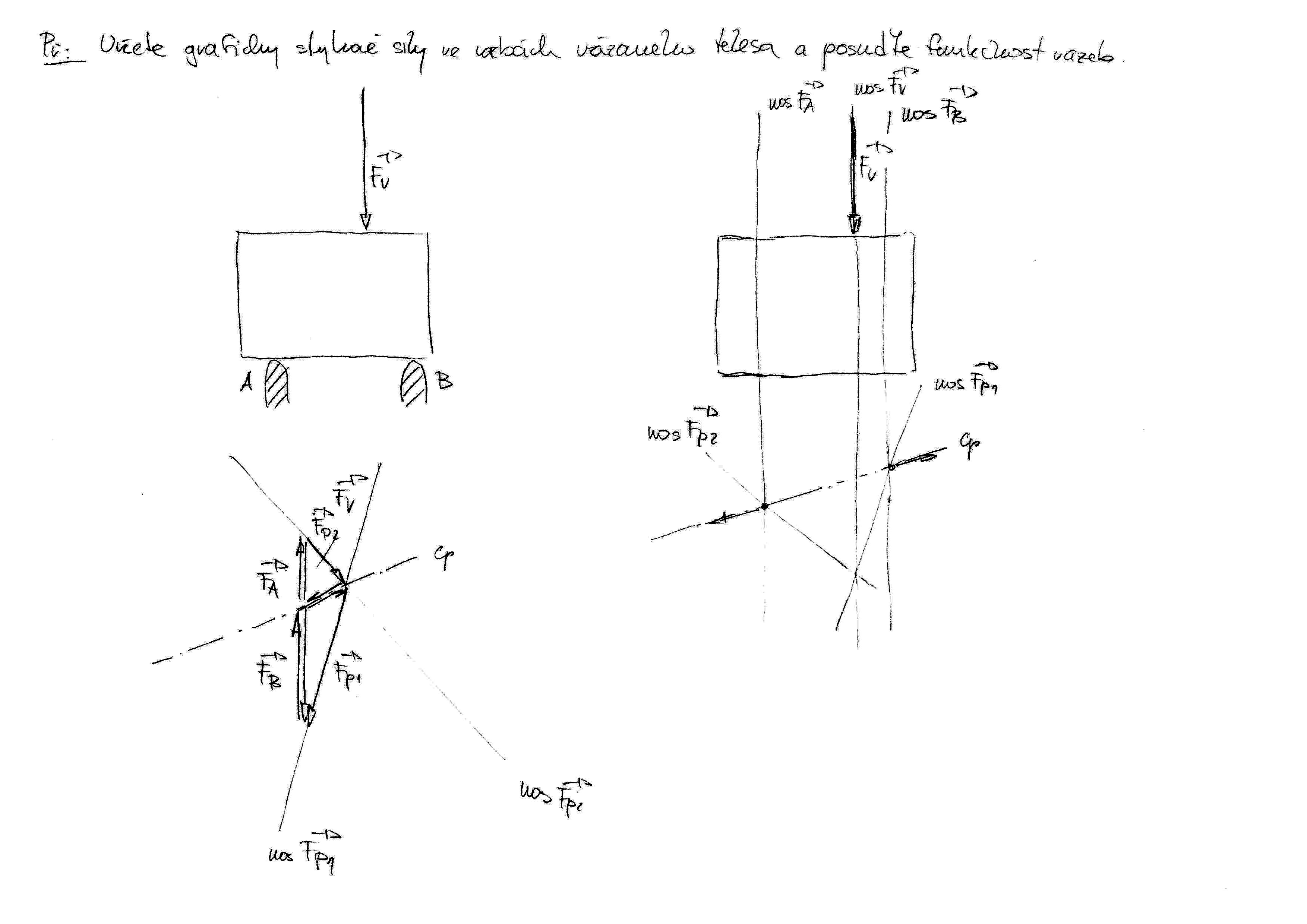
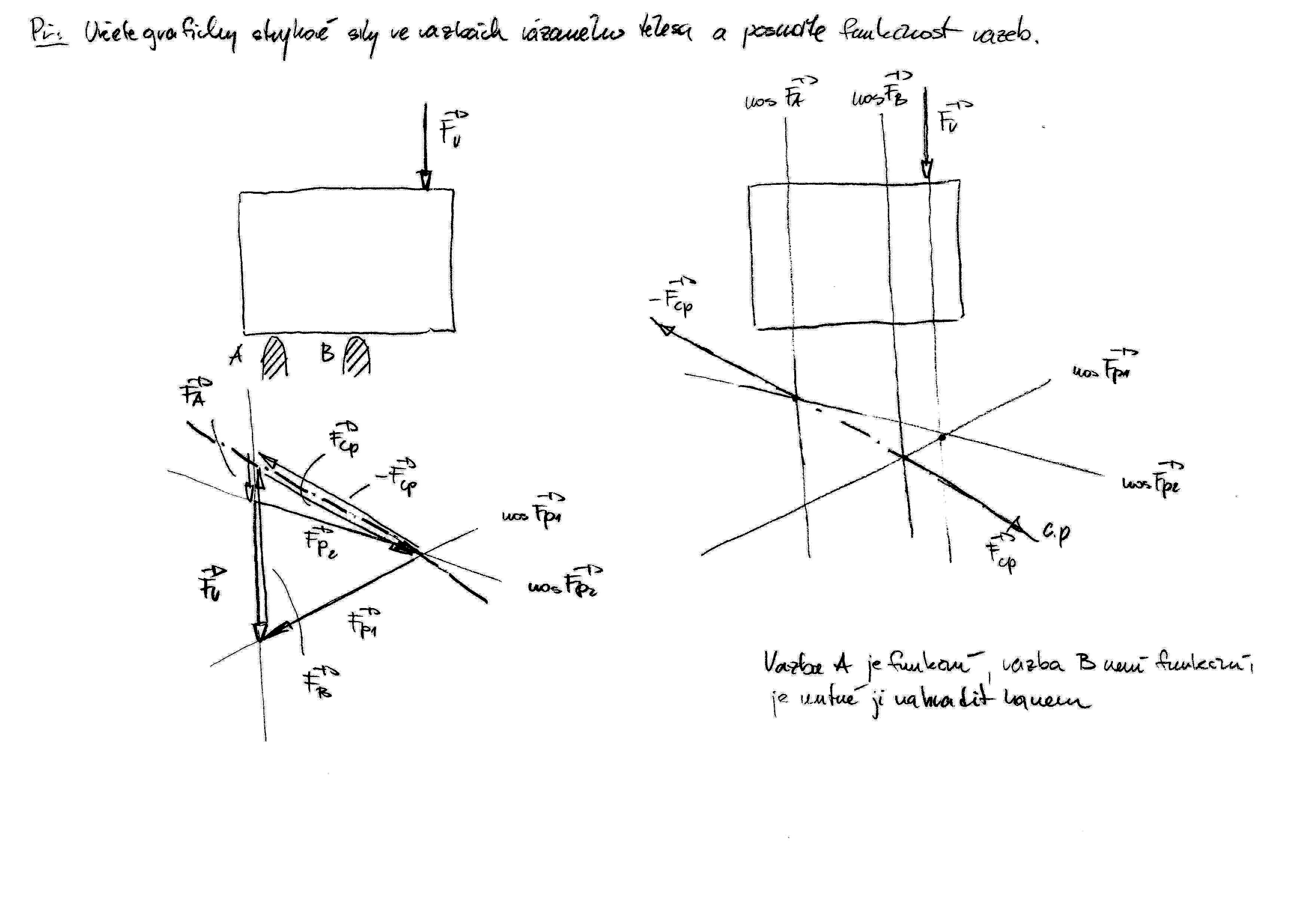
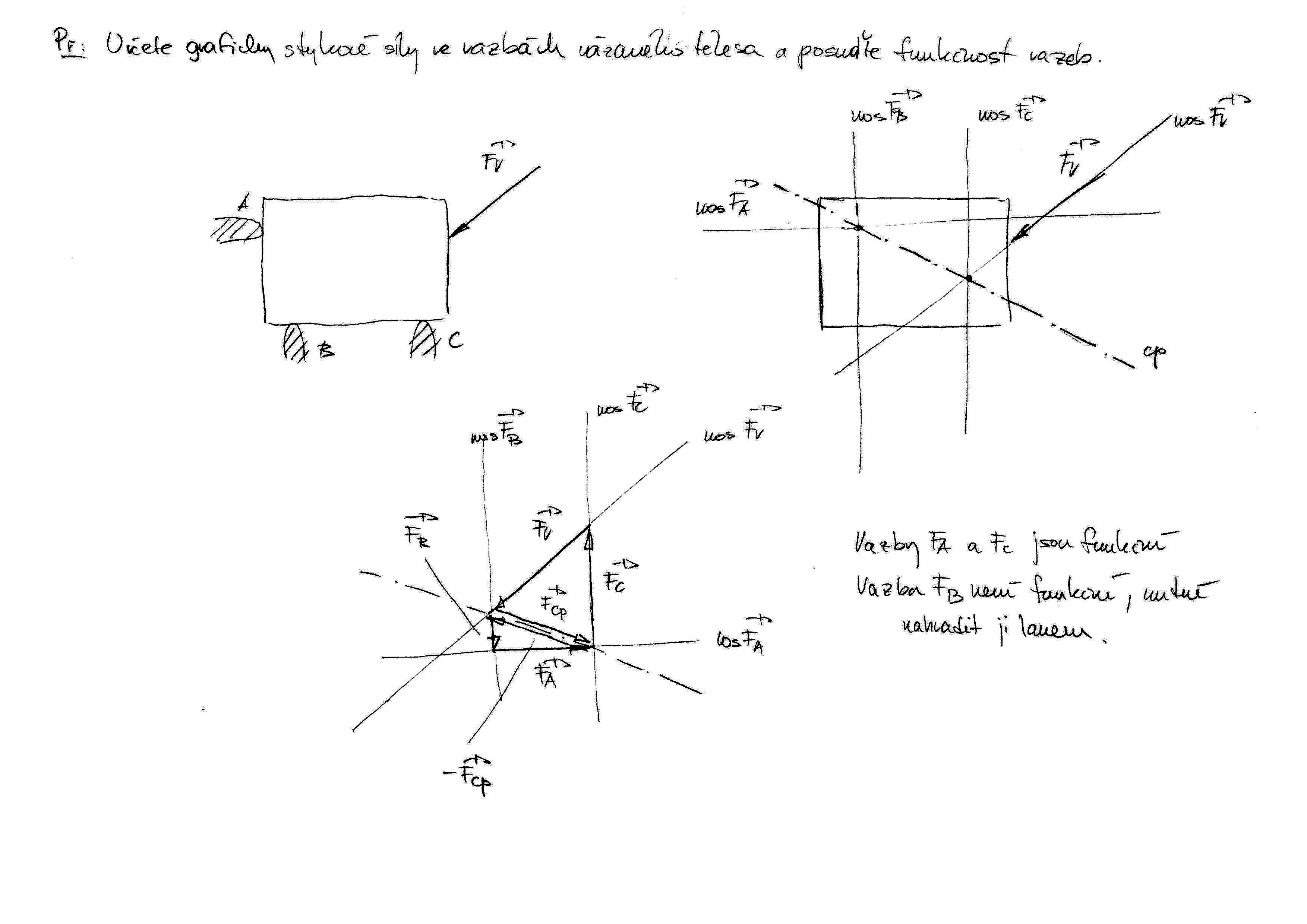
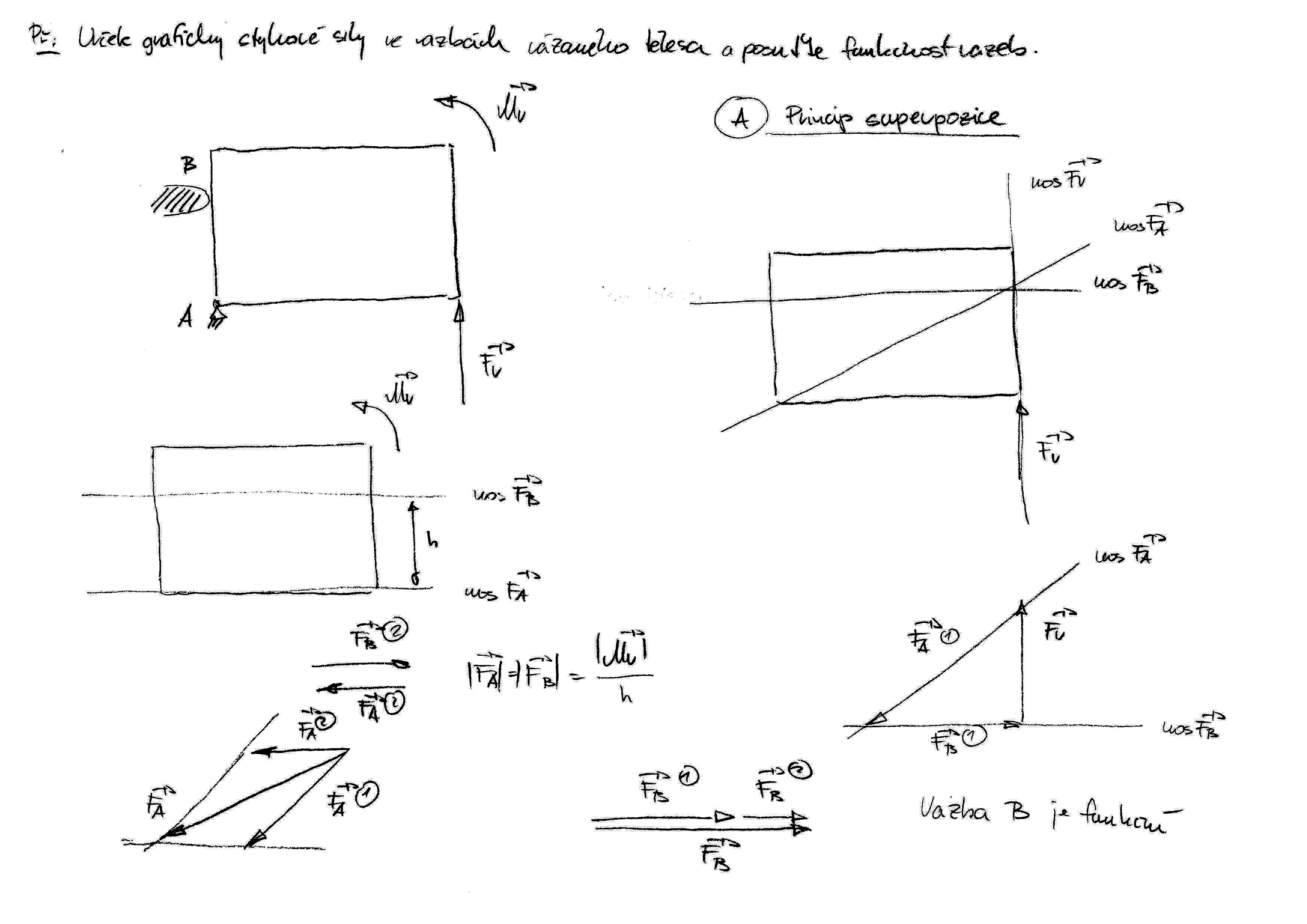
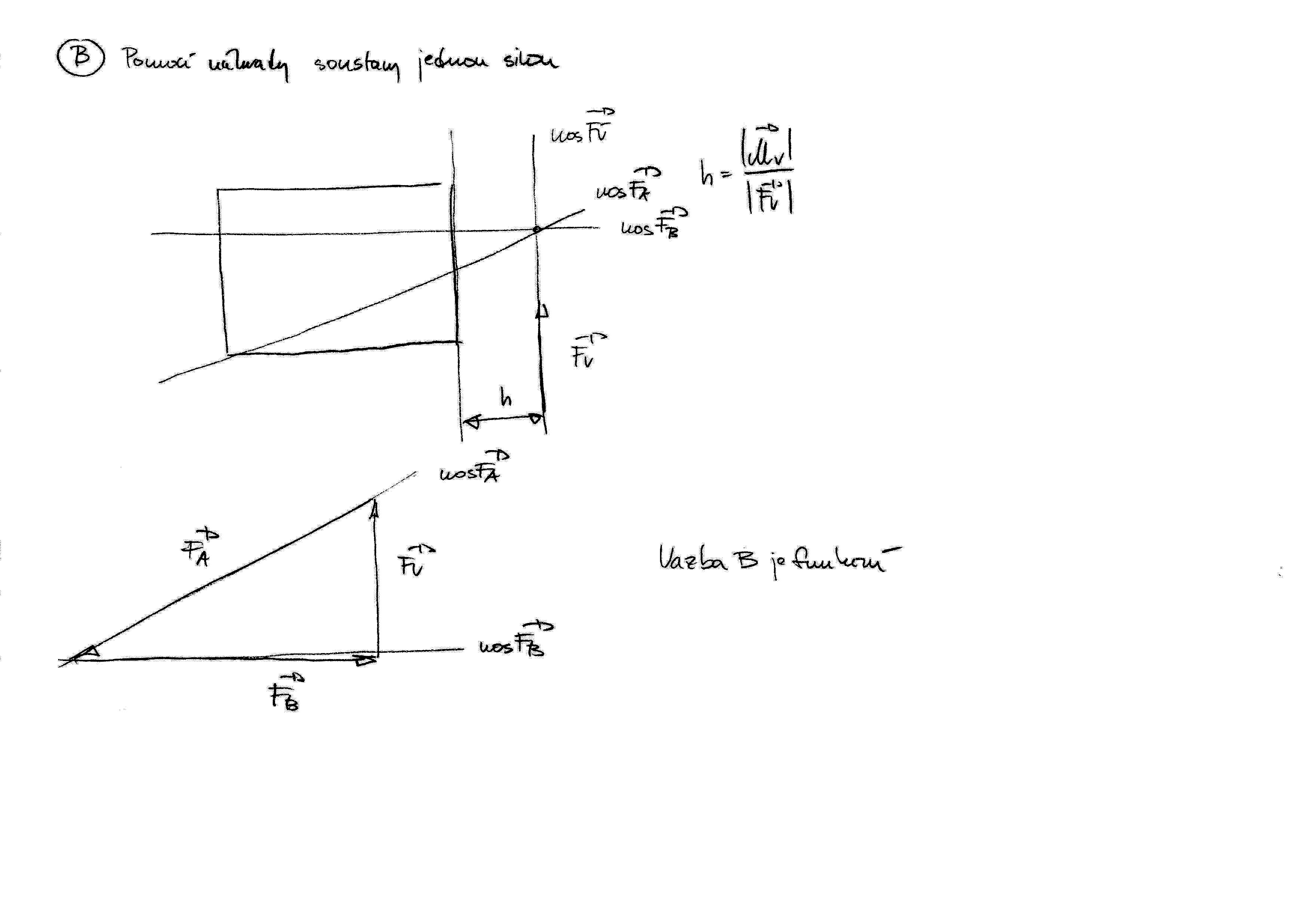
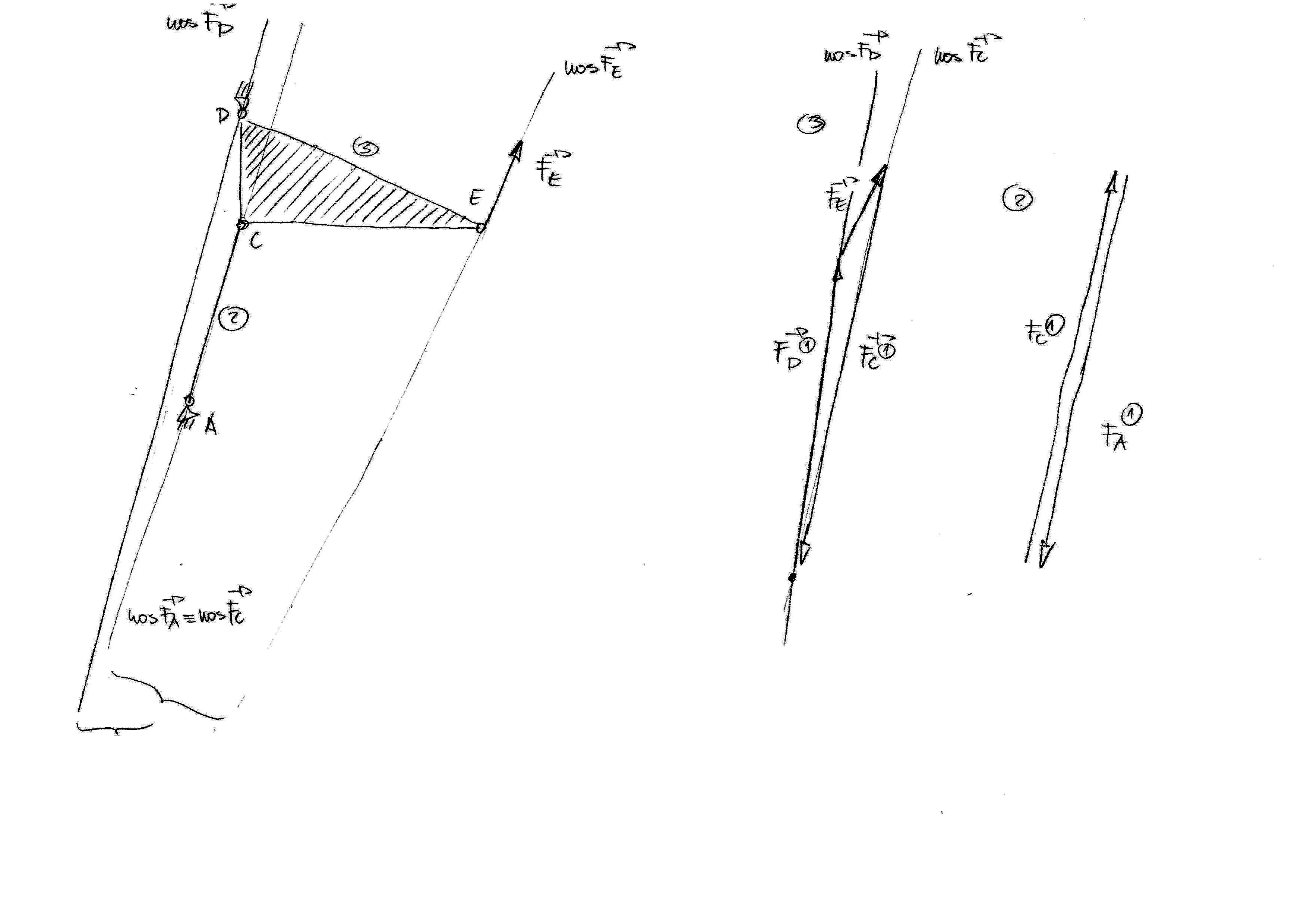
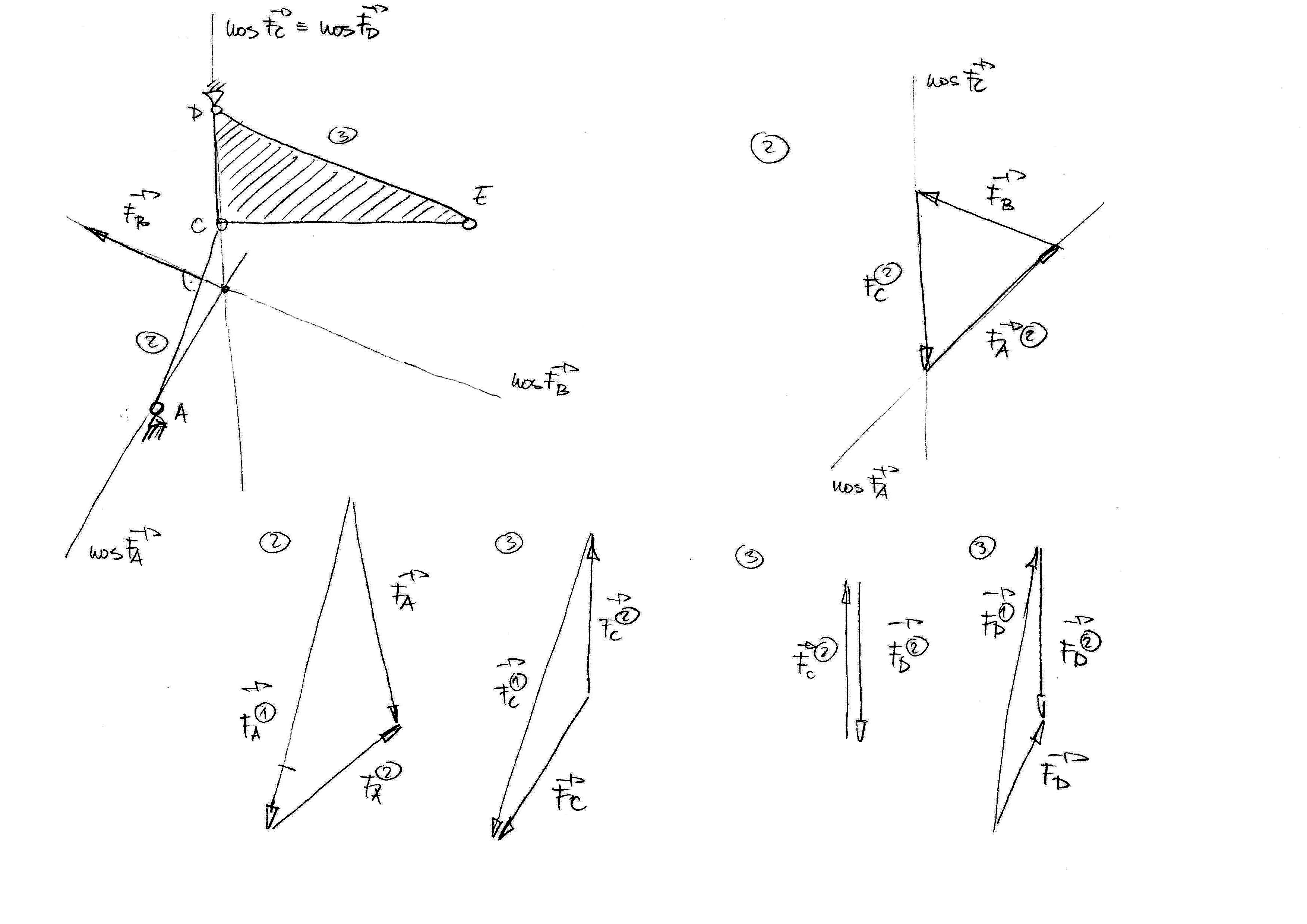
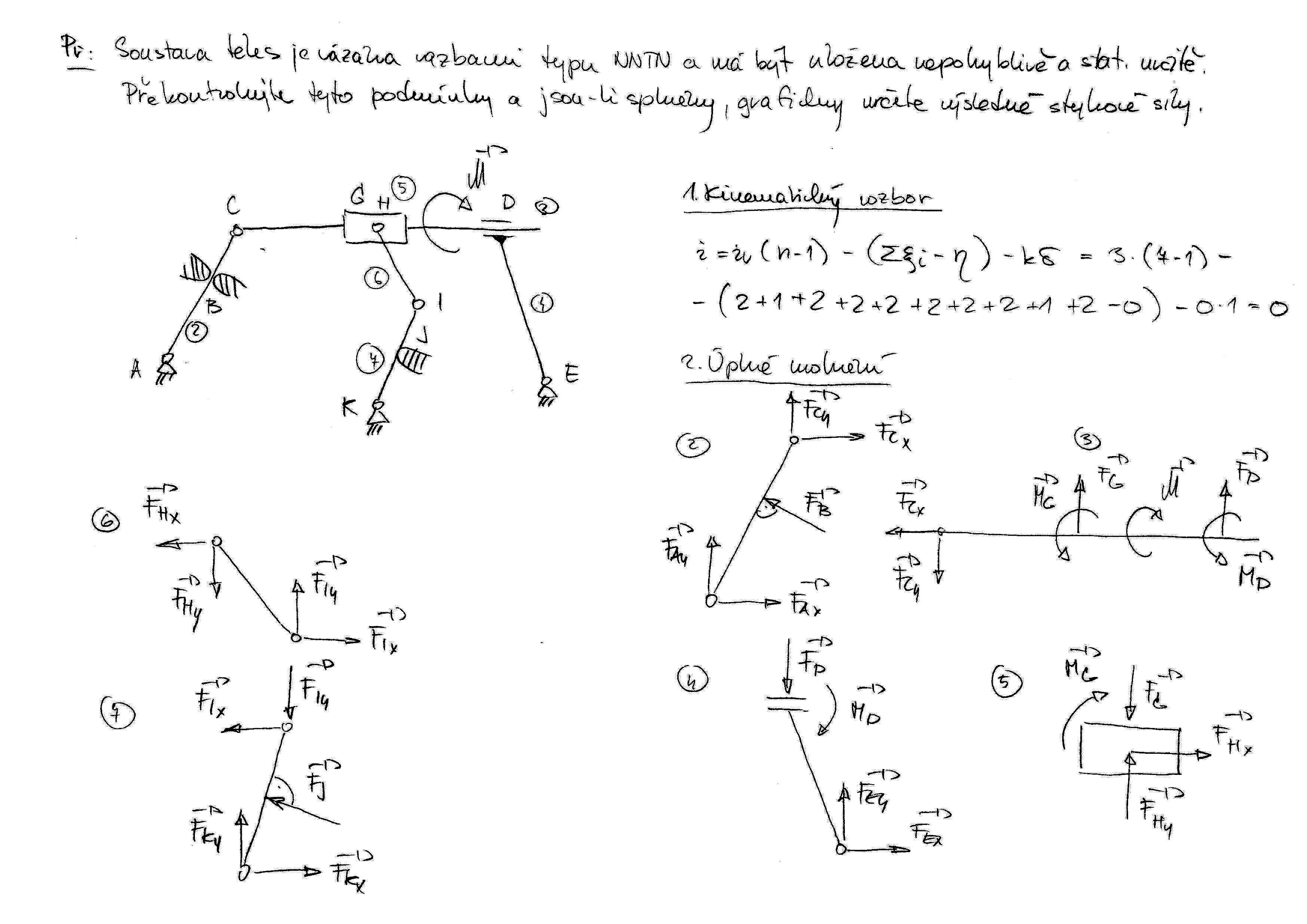
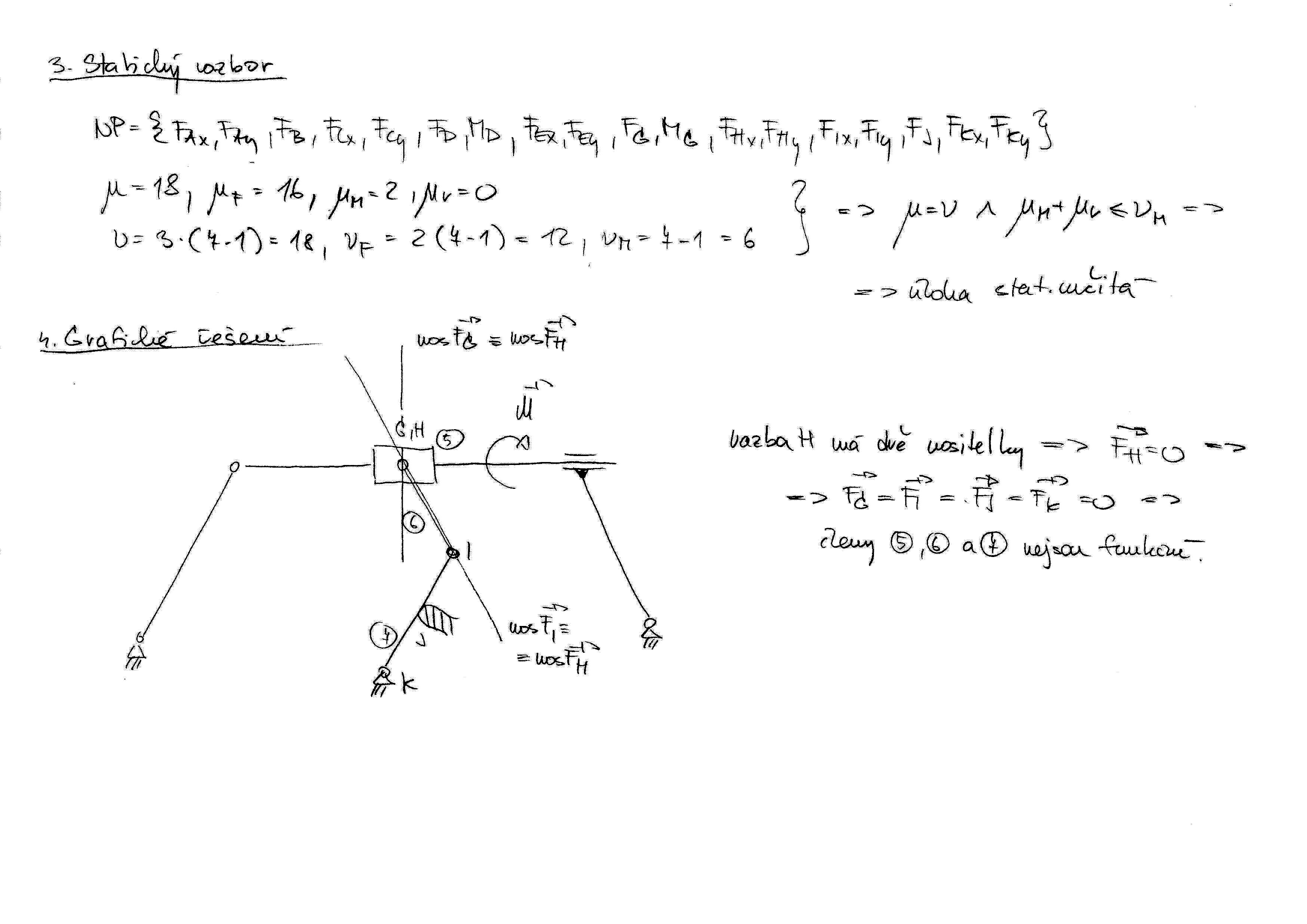
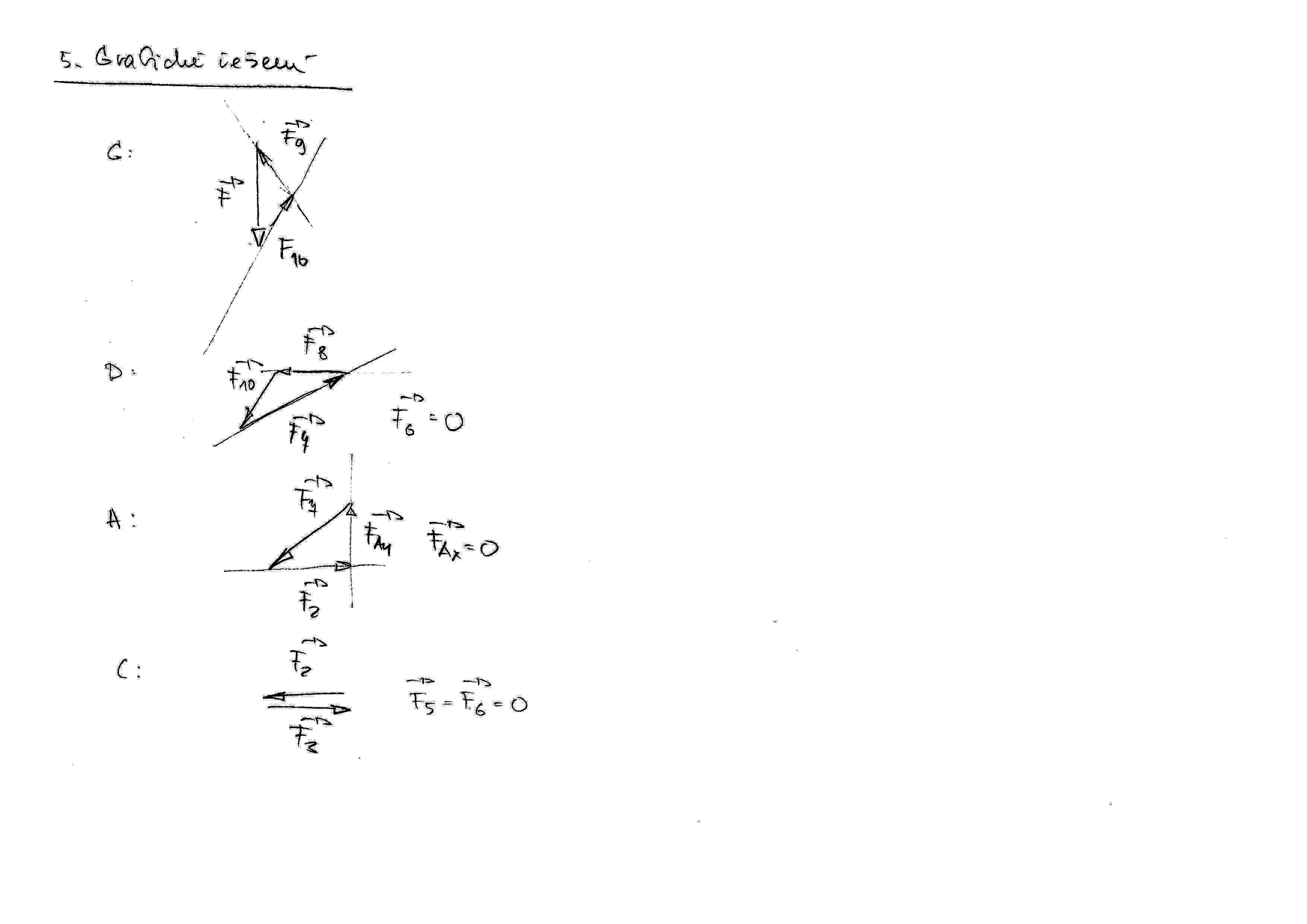
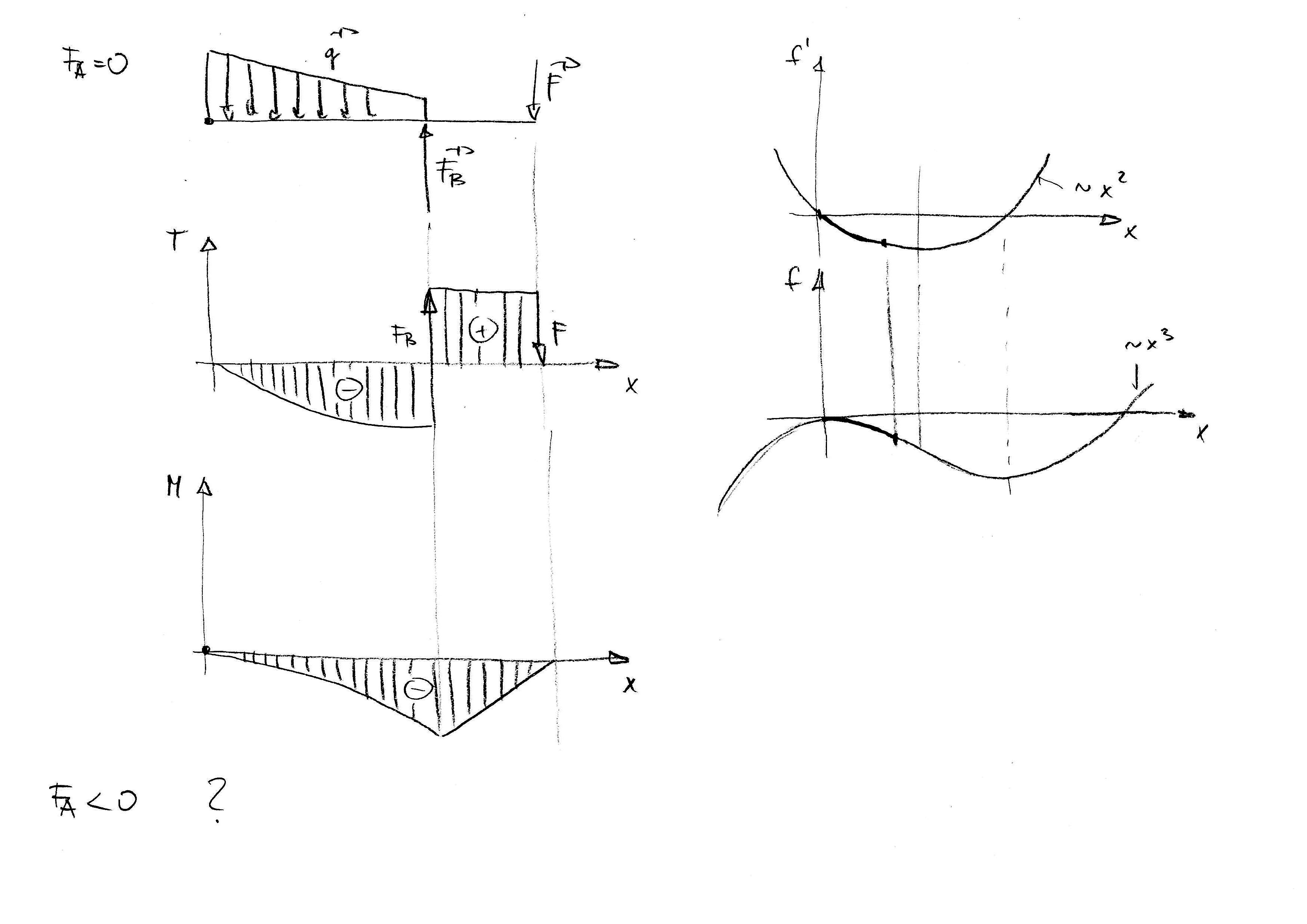
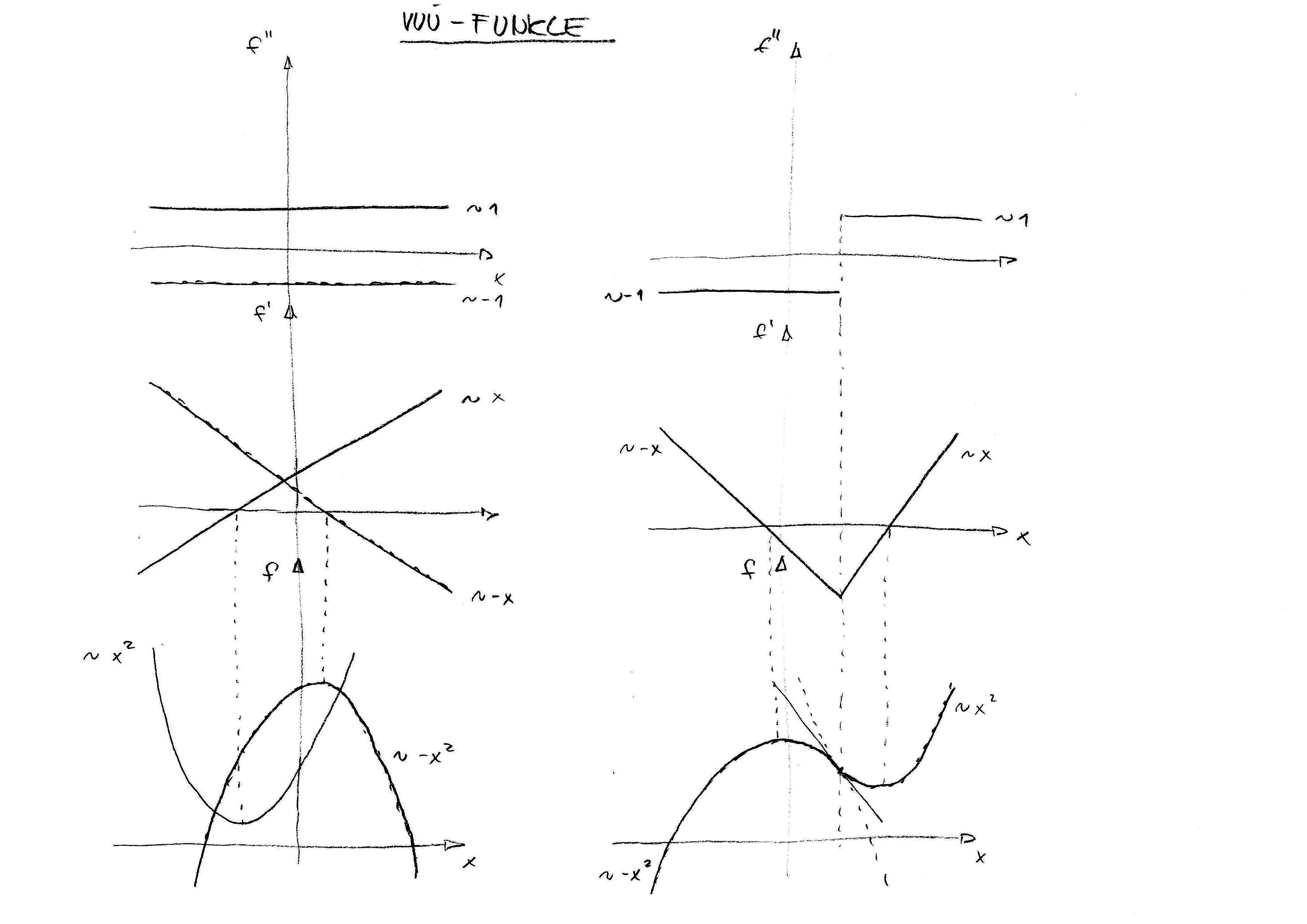
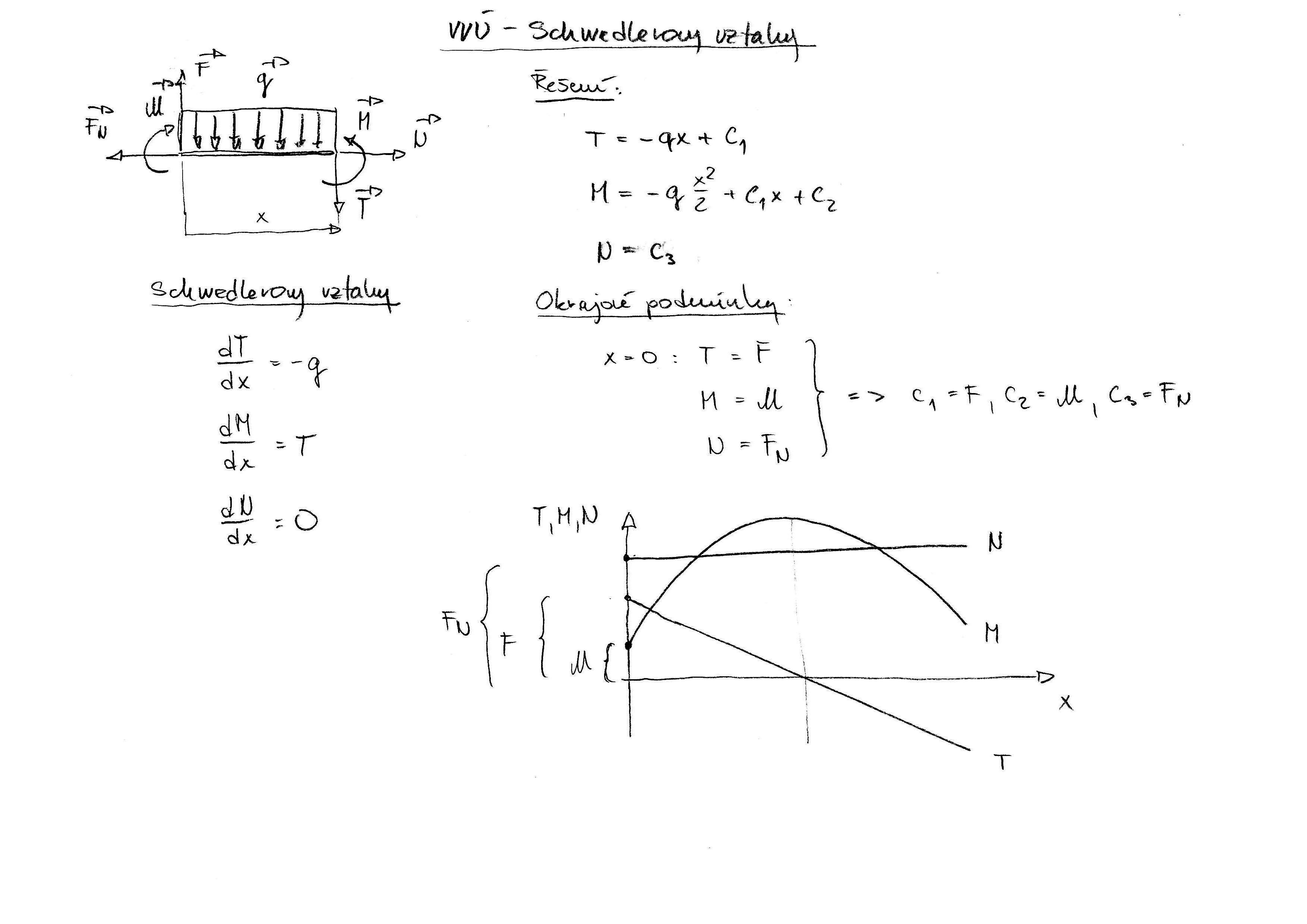
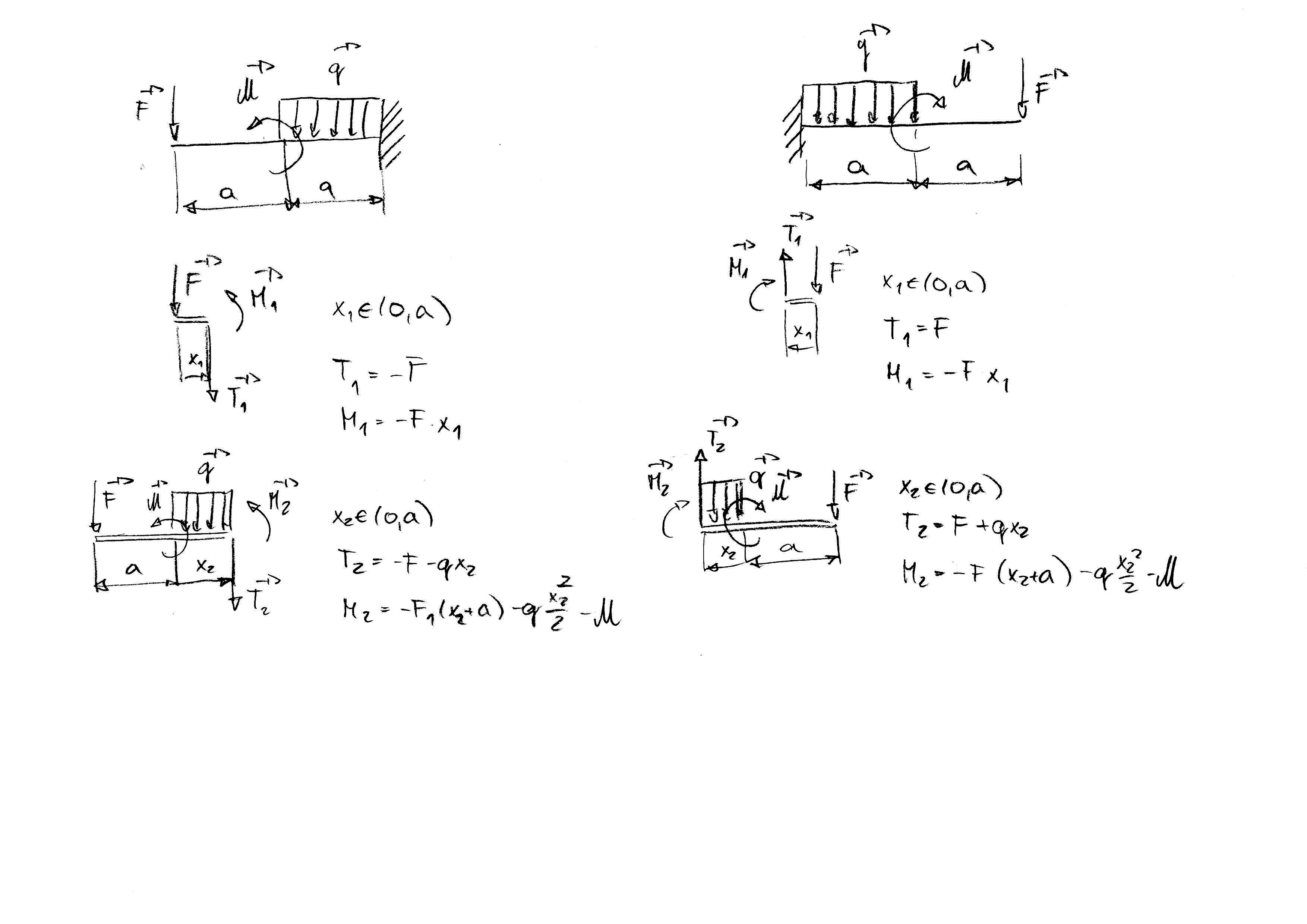
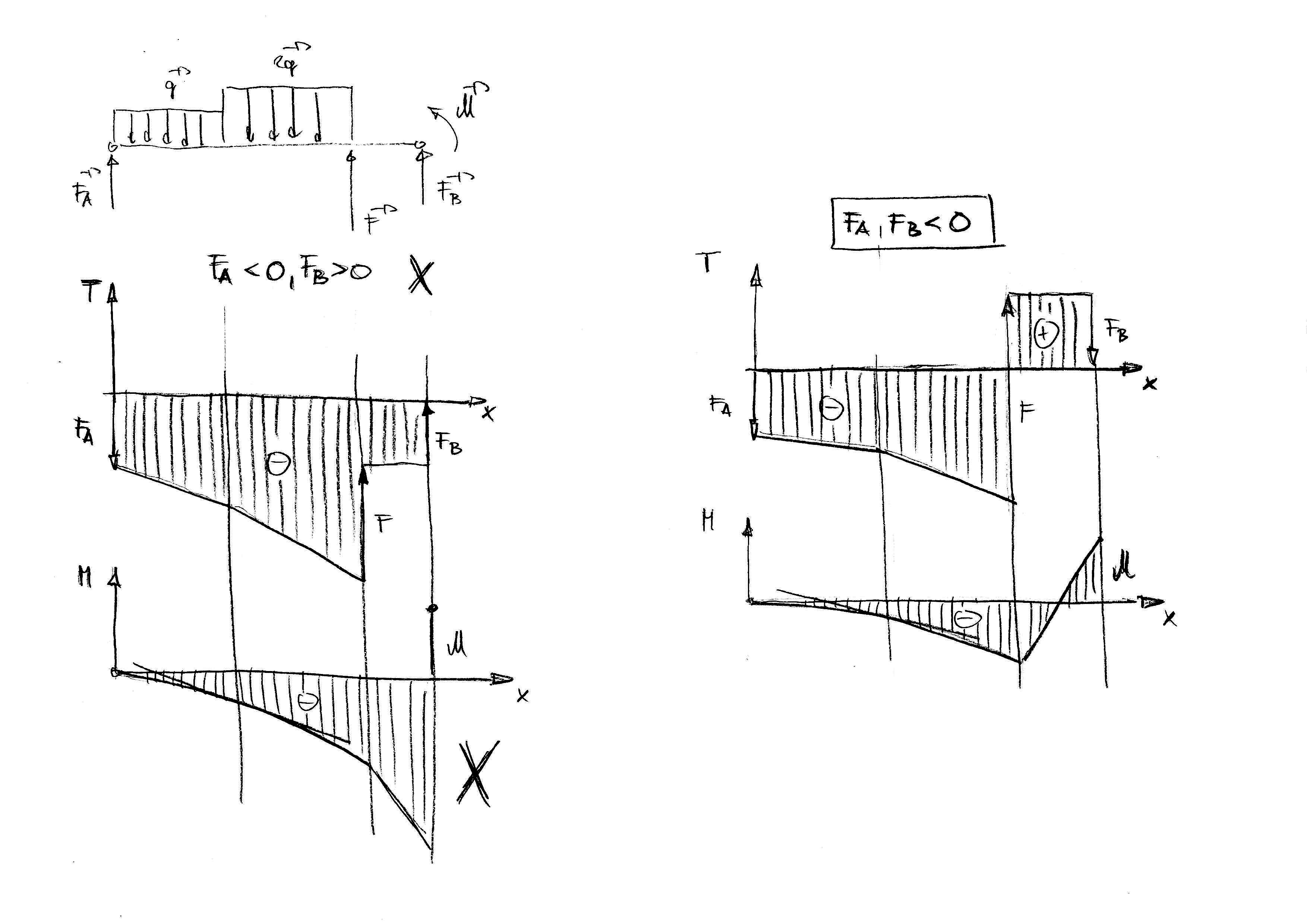
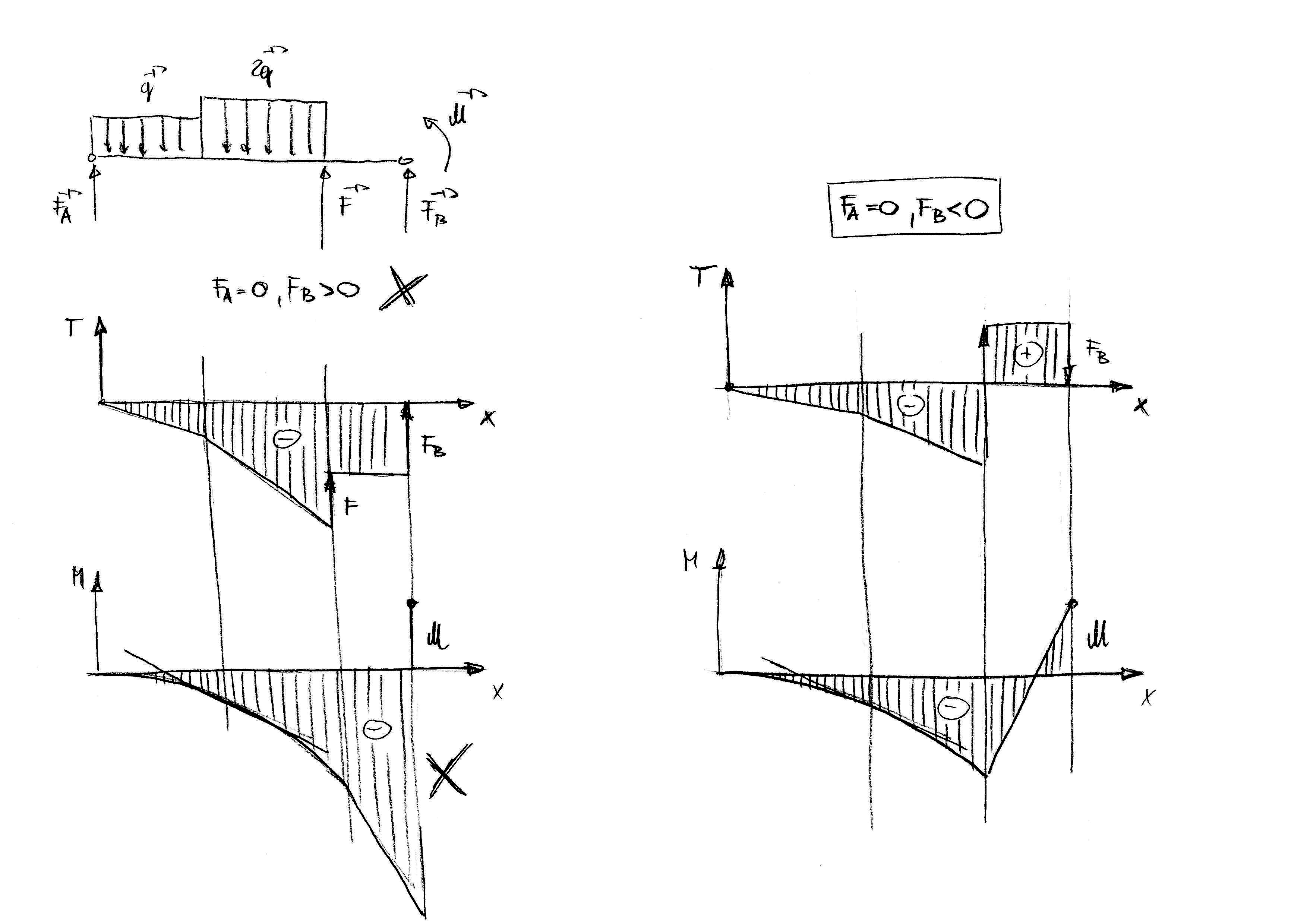
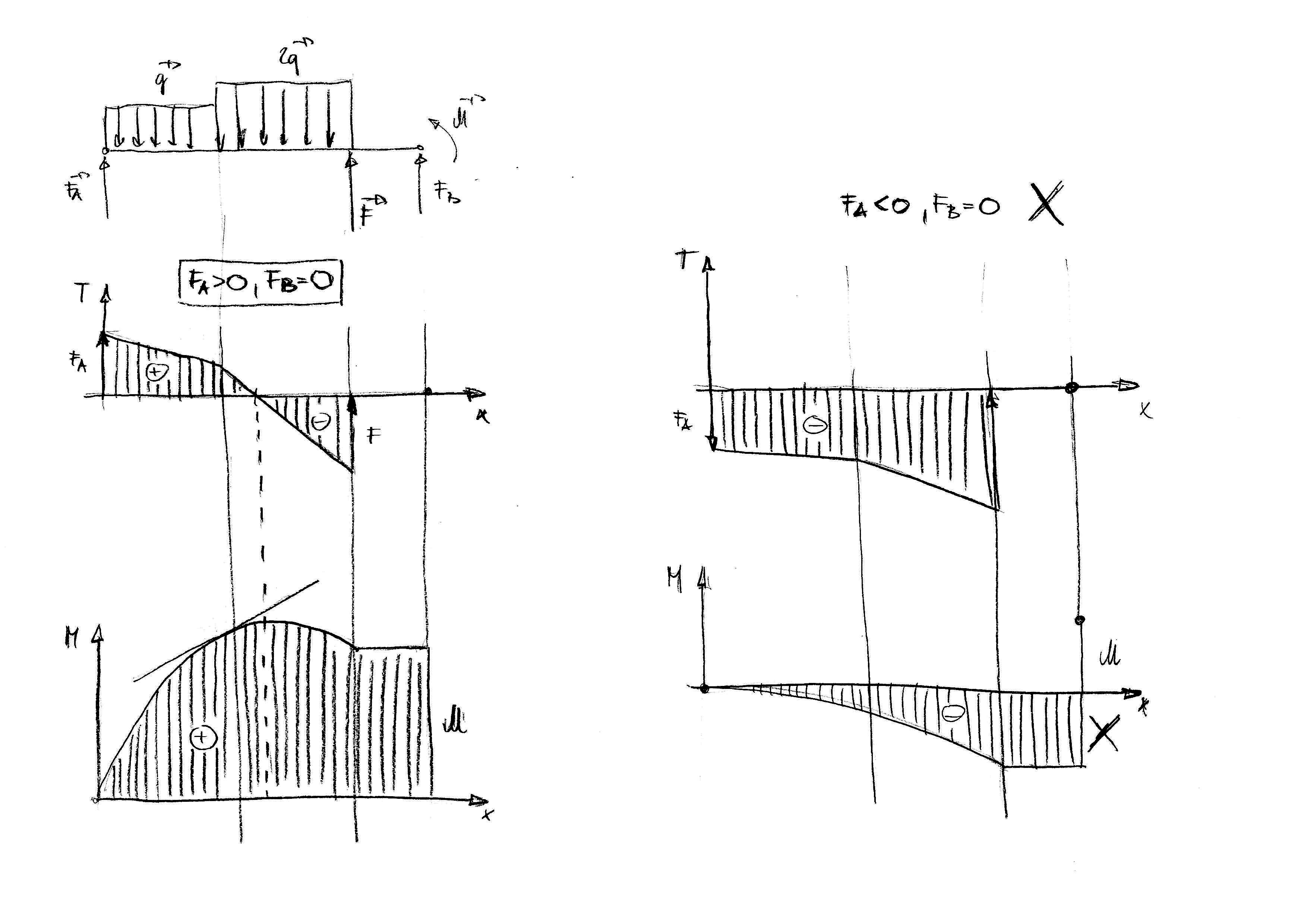
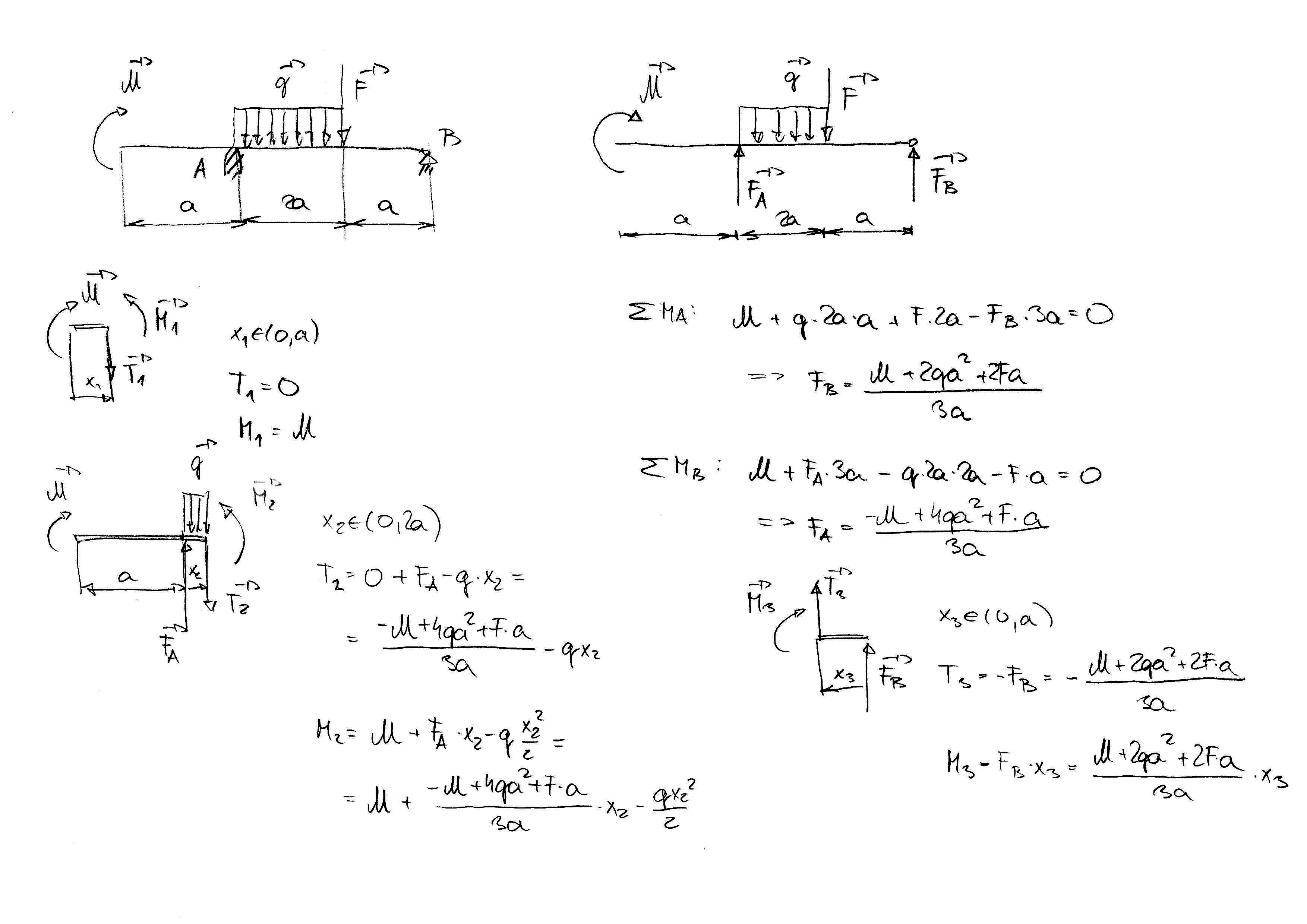
Prut v pružnosti a pevnosti (viz str. 44) - předpoklady geometrické (str. 44), předpoklady zatěžovací a vazbové (str. 45), předpoklady deformační (str. 45), předpoklady napjatostní (str. 46), Schwedlerovy vztahy (vztah 5.3, 5.4, 5.5, 5.6). Součástí testu bude i několik příkladů určení VVÚ graficky u přímých staticky určitě uložených prutů.
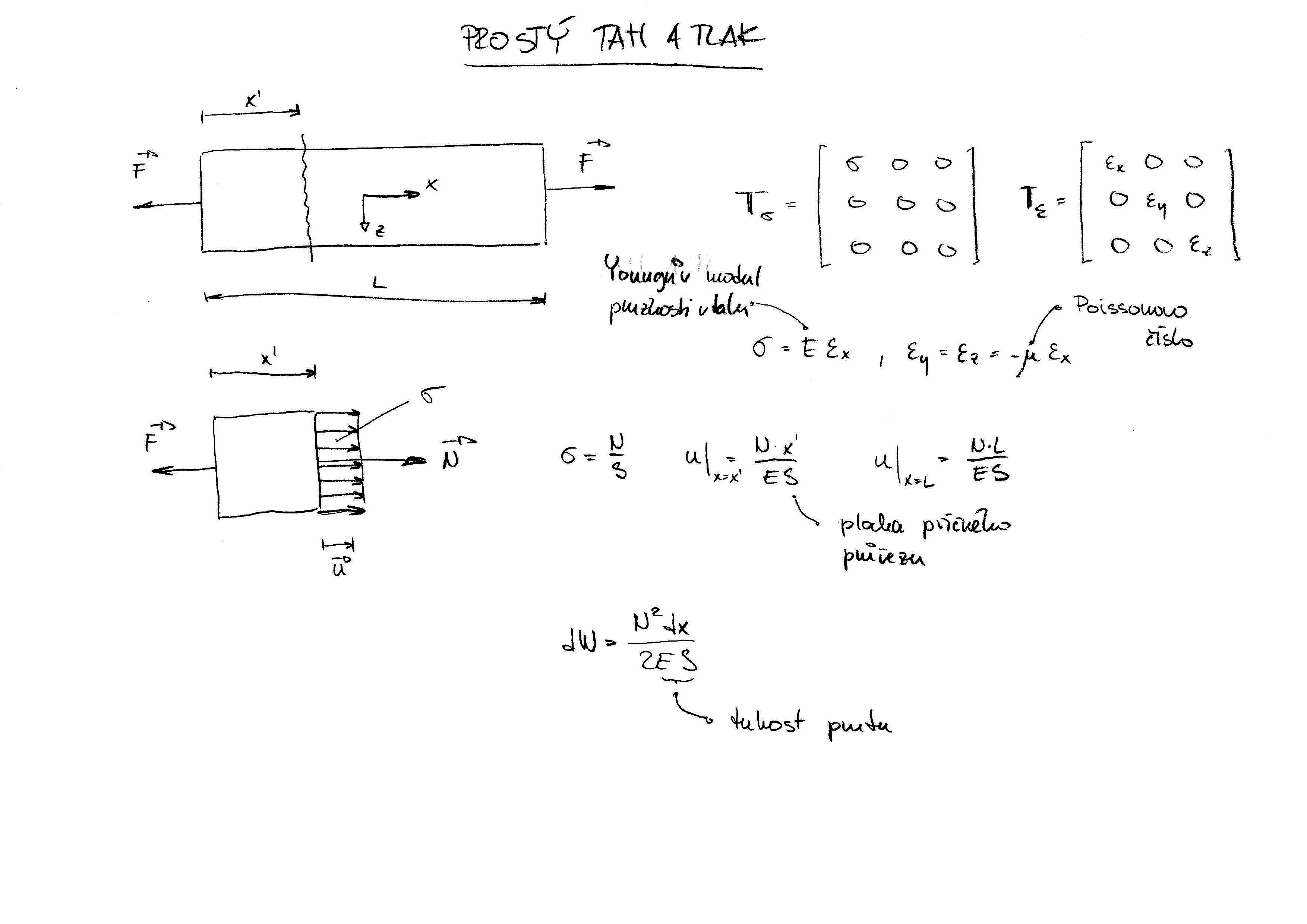
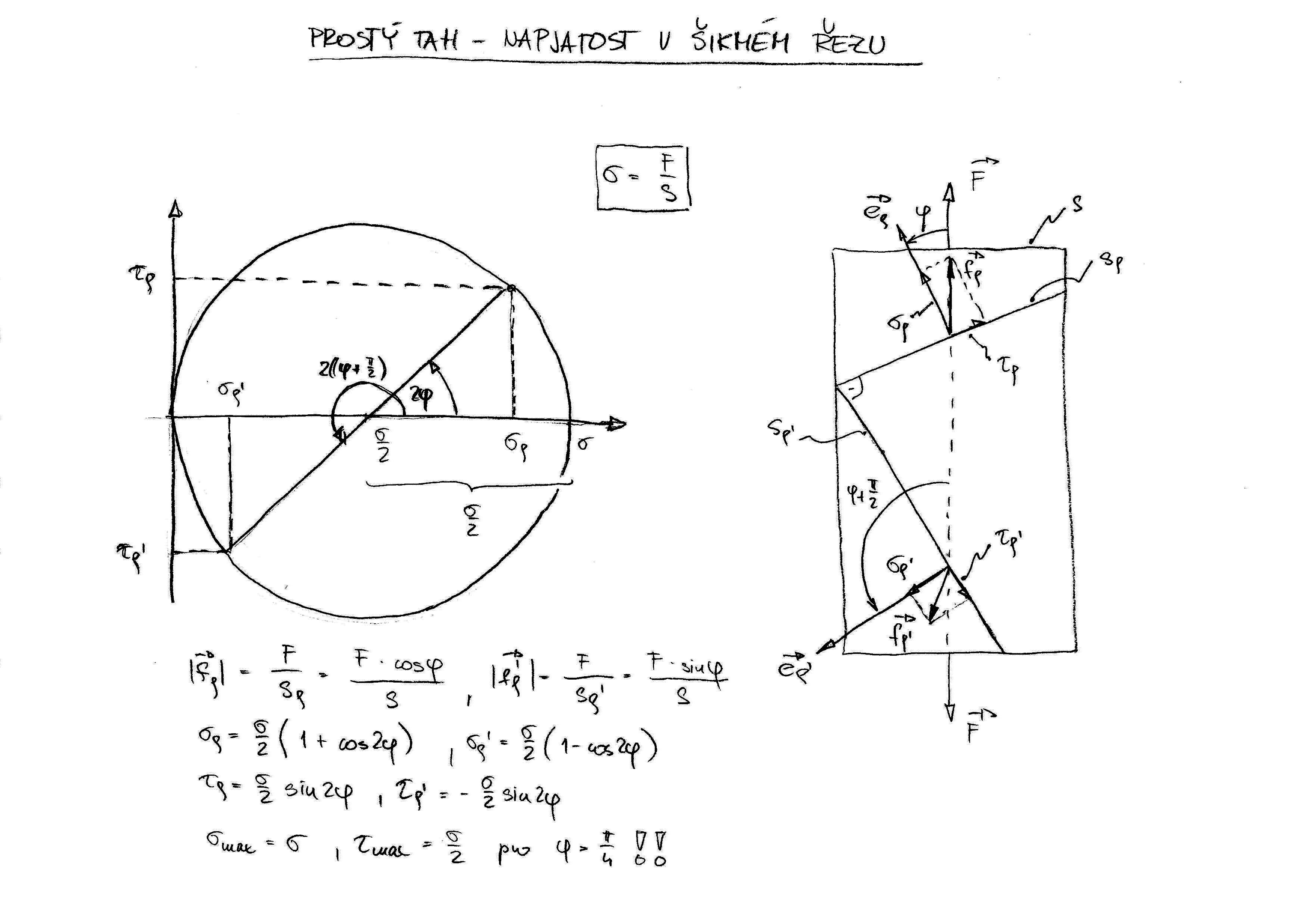
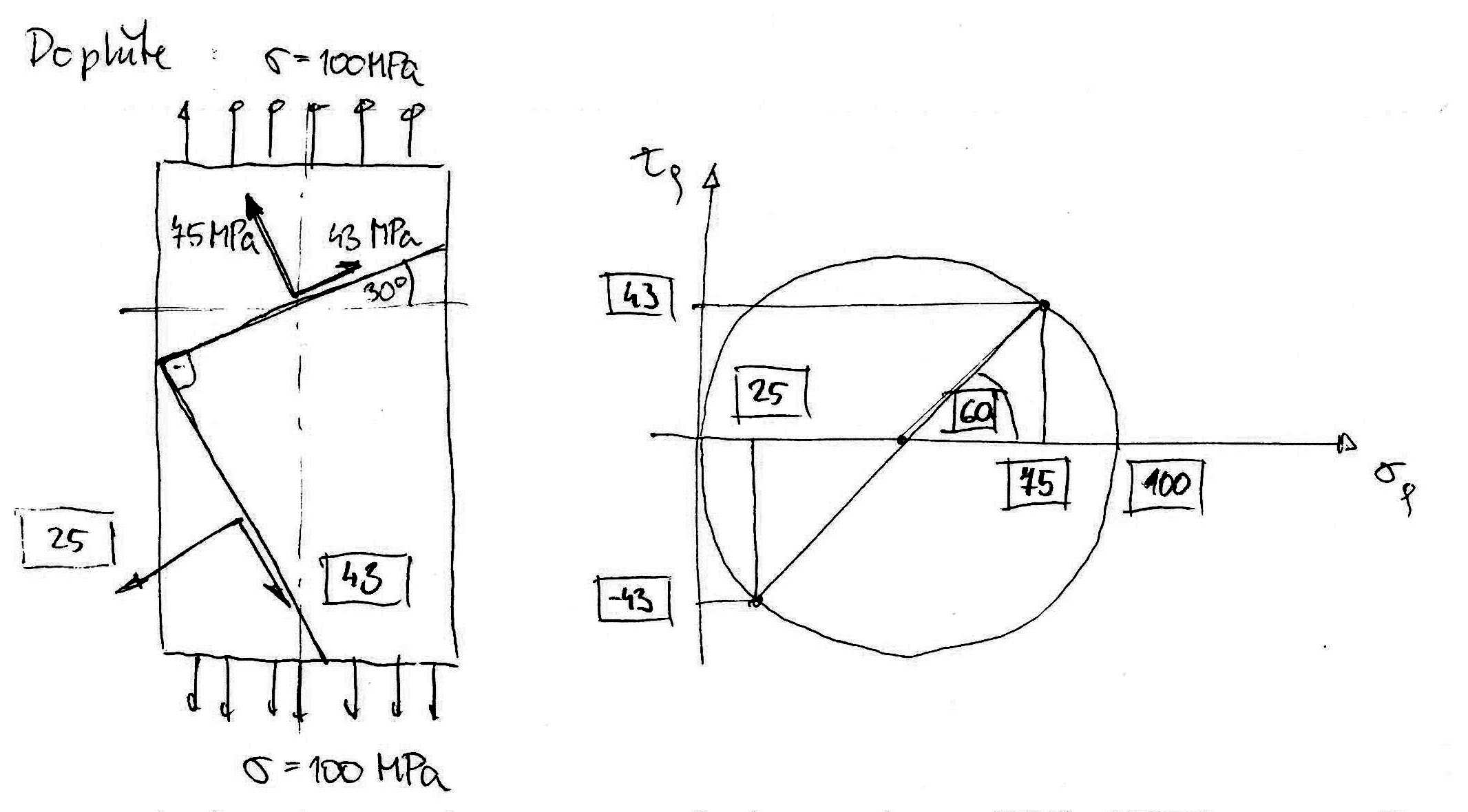
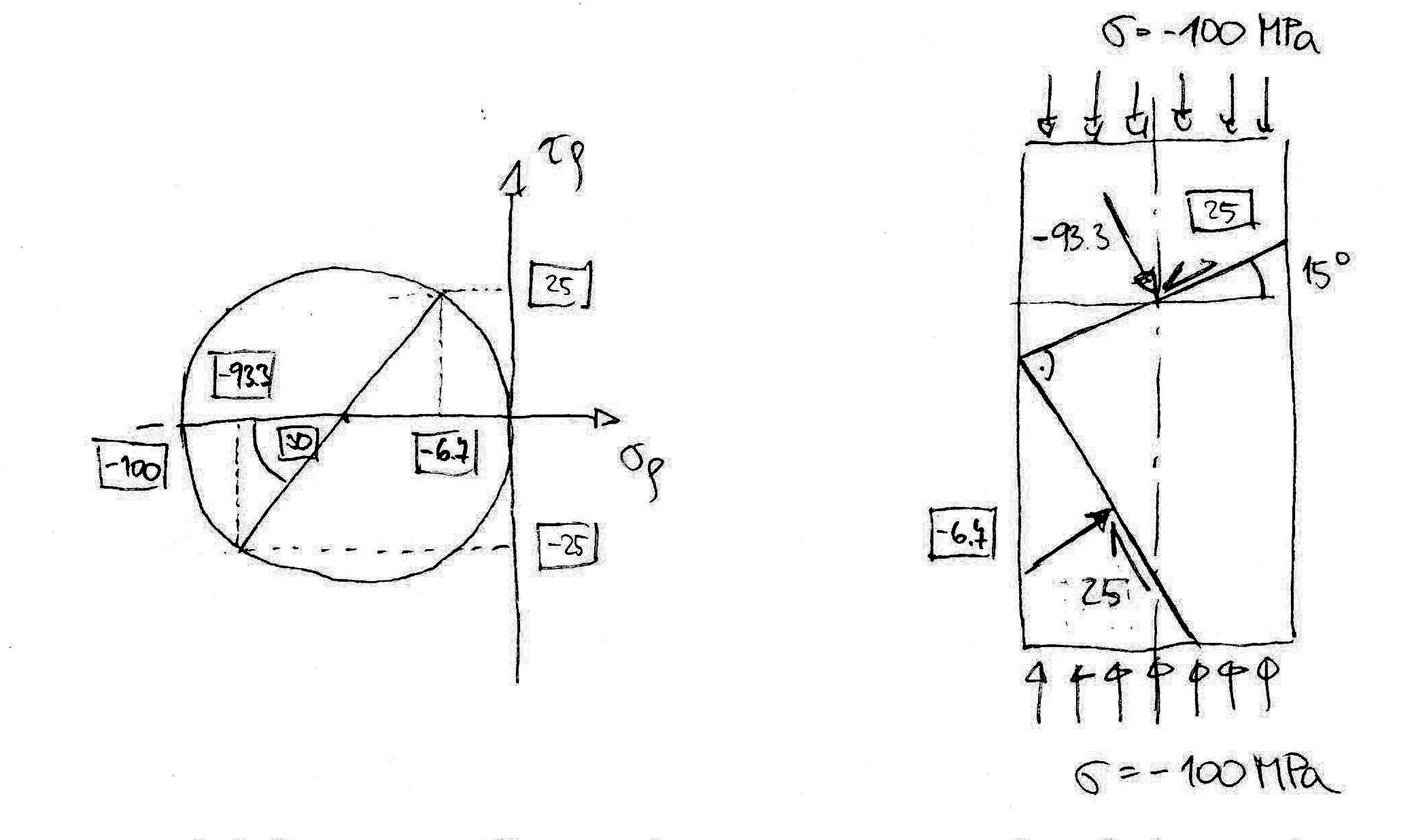
Namáhání na tah a tlak (viz str. 59) - definice (str. 59), vztahy pro napětí 6.8, 6.9, posunutí v bodě \(x\) (vztah 6.10), energie napjatosti (vztah 6.11, 6.12), napjatost v šikmém řezu (str. 63-66)}.
Namáhání na ohyb (viz str. 91) - definice (str. 91), vztahy pro napětí a deformaci 7.13 a 7.14, definice neutrální osy a kdy nastává shoda shoda polohy neutrální osy s nositelkou ohybového momentu (str. 96), nebezpečné místo průřezu (str. 97), vztah 7.22 pro energii napjatosti, rovnice průhybové čáry a sestavení okrajových podmínek a podmínek spojitosti a hladkosti průhybové čáry na konkrétním příkladu (str. 103-106), Žuravského vzorec (vztah 7.36), hodnota \(\tau_{max}\) pro obdélníkový (kruhový) průřez, definice středu smyku (str. 122).
Namáhání na krut (viz str. 171) - natočení v místě \(x\) střednice prutu (vztah 8.6), napětí v bodě příčného průřezu (vztah 8.8), energie napjatosti (vztah 8.15).
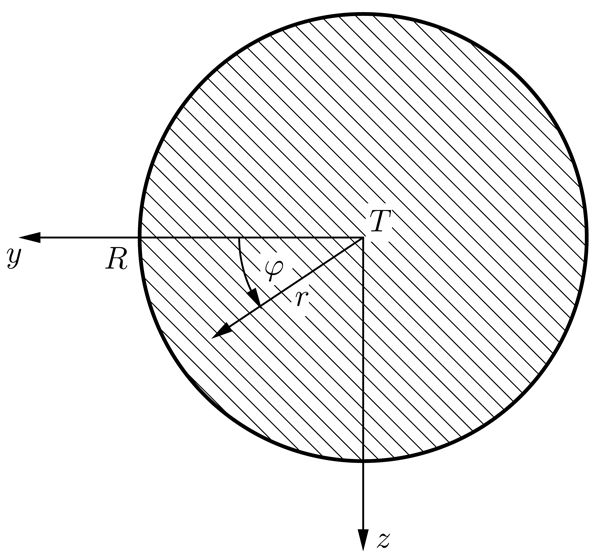
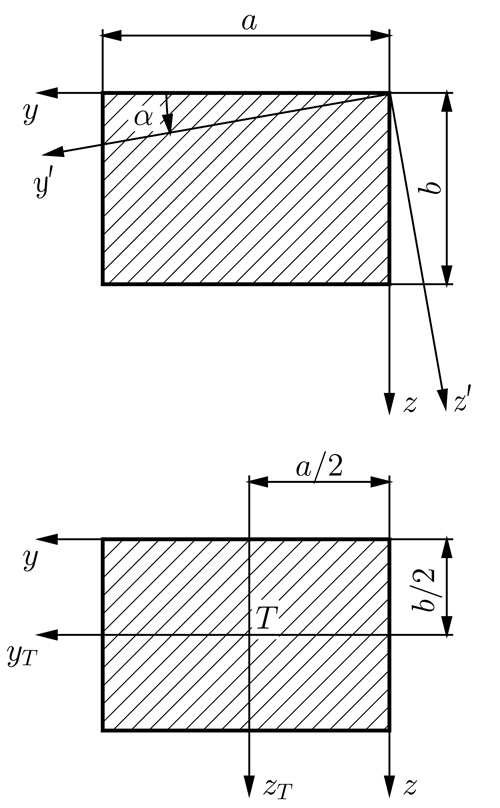
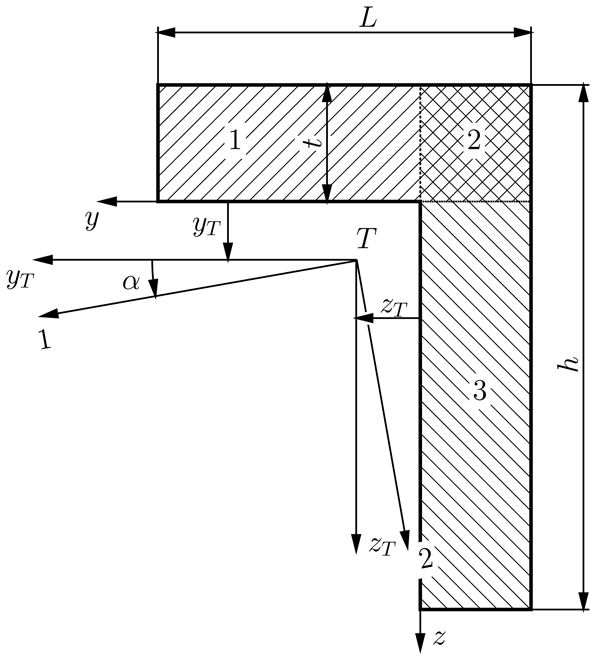
Průřezové charakteristiky (nebudou vyžadovány u testu, viz příloha A, str. 256) - definice průřezových charakteristik (str. 257-258), základní vlastnosti kvadratických momentů (str. 259-260), Steinerovy věty (vztah 15, str. 262), tenzor kv. momentů plochy \(\boldsymbol{T}_J\) (vztah 20, str. 266), definice hlavního souřadnicového systému, definice hlavního centrálního souřadnicového systému, vztah pro vyjádření úhlu \(\varphi_I\) (vztah 21, str. 266), nakreslení Möhrovy kružnice pro \(\boldsymbol{T}_J\) pro konkrétní hodnoty \(J_y\), \(J_z\) a \(J_{yz}\) (str. 268), doporučuji si projít příklady na str. 270-280.
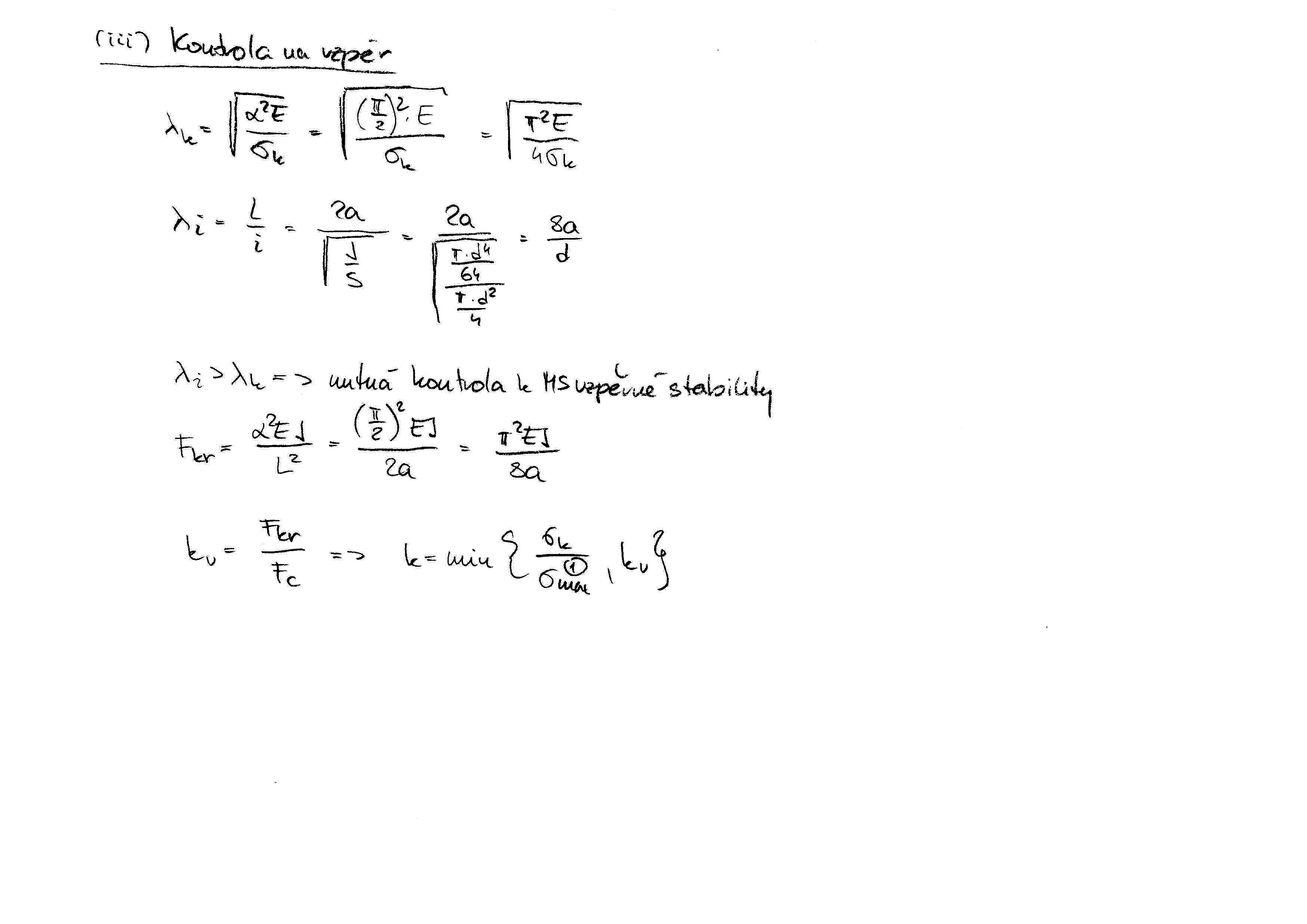
Mezní stav vzpěrné stability prutů (viz str. 188) - formou konkrétního příkladu, dále pak definice mezního stavu vzpěrné stability (str. 188), vztah pro kritickou sílu (vztah 9.29, str. 197), definice štíhlosti prutu (vztah 9.31, str. 198), její kritická hodnota (vztahy 9.32, 9.33, str. 199), Eulerova hyperbola (str. 198) pro tvárný/křehký materiál, doporučuji si projít demonstrační příklad na str. 201-202.
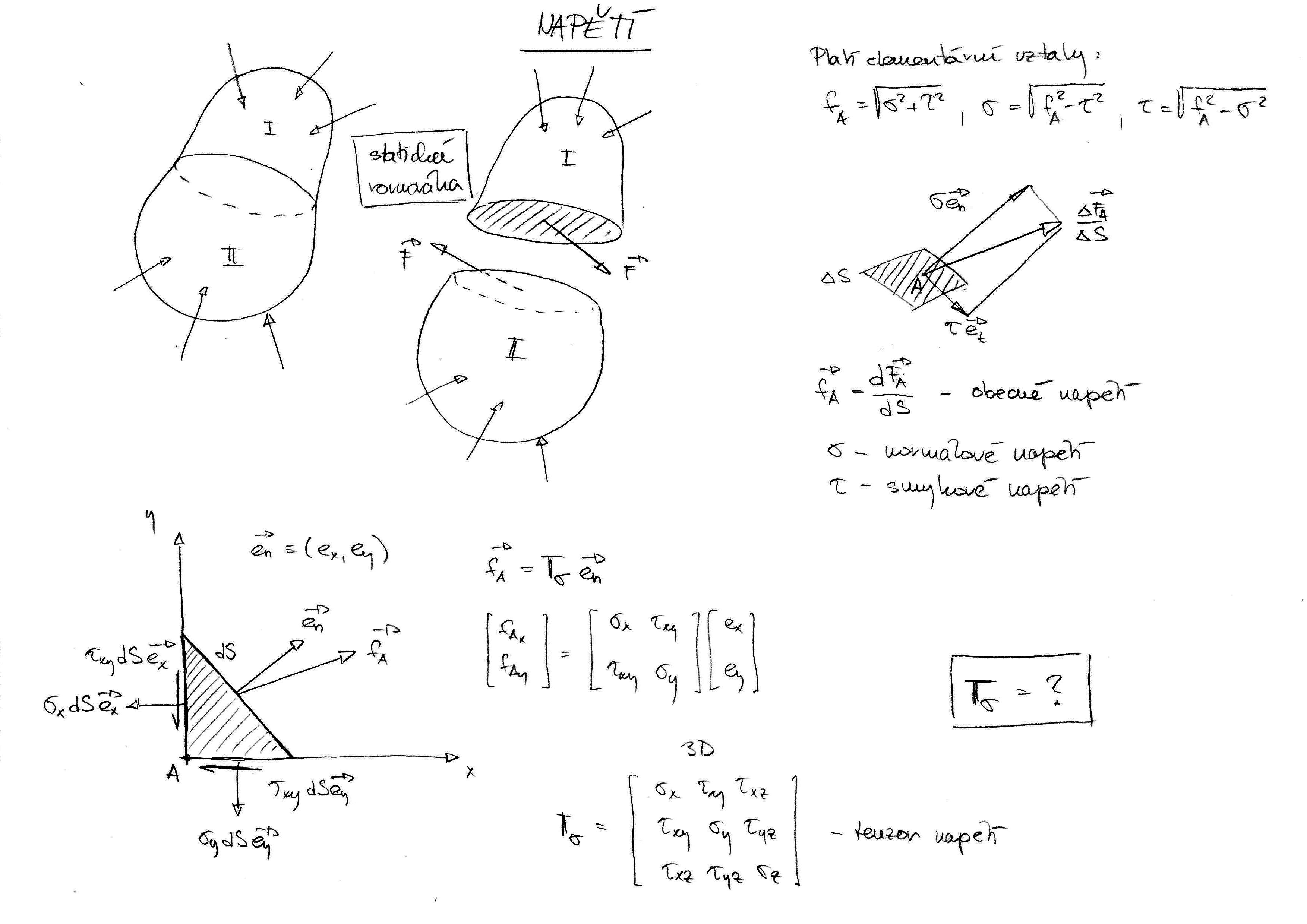
Napjatost v bodě tělesa (viz str. 203) - definice napjatosti (str. 203), obrázek str. 204, vztah mezi vektorem obecného napětí \(\boldsymbol{f}_\rho\) tenzorem napětí \(\boldsymbol{T}_\sigma\) a směrovými kosiny \(\boldsymbol{\alpha}\) (obecně/maticově/symbolicky, vztahy 10.6-10.8, str. 205), definice hlavní roviny (str. 207), definice invariantů a "invariantnosti" tenzoru napětí \(\boldsymbol{T}_{\sigma}\), definice oktaedrické roviny a napětí \(\tau_{o}\), rovinná napjatost (str. 218), prutová napjatost a prostý smyk (str. 222), klasifikace napjatosti (str. 223).
Mezní stav pružnosti (str. 226) - Trescovy podmínky plasticity (vztah 11.4, str. 227), zobrazení mezní křivky pro Tescovu podmínku plasticity v případě rovinné napjatosti (str. 228, dole), zobrazení Trescovy podmínky plasticity v Möhrově rovině (str. 229), Trescova podmínka plasticity pro případ prutové napjatosti (vztah 11.7, str. 229), Trescova podmínka plasticity pro případ smykové napjatosti (vztah 11.9, str. 229), definice podmínky plasticity HMH (vztah 11.13, str. 230), zobrazení mezní křivky pro HMH podmínku plasticity v případě rovinné napjatosti (str. 231, dole), zobrazení HMH podmínky plasticity v Möhrově rovině a definice Lodeho parametru \(\mu_\sigma\) (str. 232), HMH podmínka plasticity pro případ prutové napjatosti (vztah 11.17, str. 233), HMH podmínka plasticity pro případ smykové napjatosti (vztah 11.19, str. 233).
Mezní stav křehké pružnosti (nebude vyžadován u testu - přesto doporučuji k nastudování, od str. 237) - podmínka mezního stavu křehké pevnosti MOS (vztah 11.31, str. 237), grafické znázornění podmínky křehké pevnosti MOS v Möhrově rovině (str. 239).
Součástí testu může být jednoduchý příklad staticky určitě uloženého prutu s úkolem určení extrémních hodnot napětí, příp. hodnot posuvů nebo natočení v daném bodě střednice nebo styčníku.
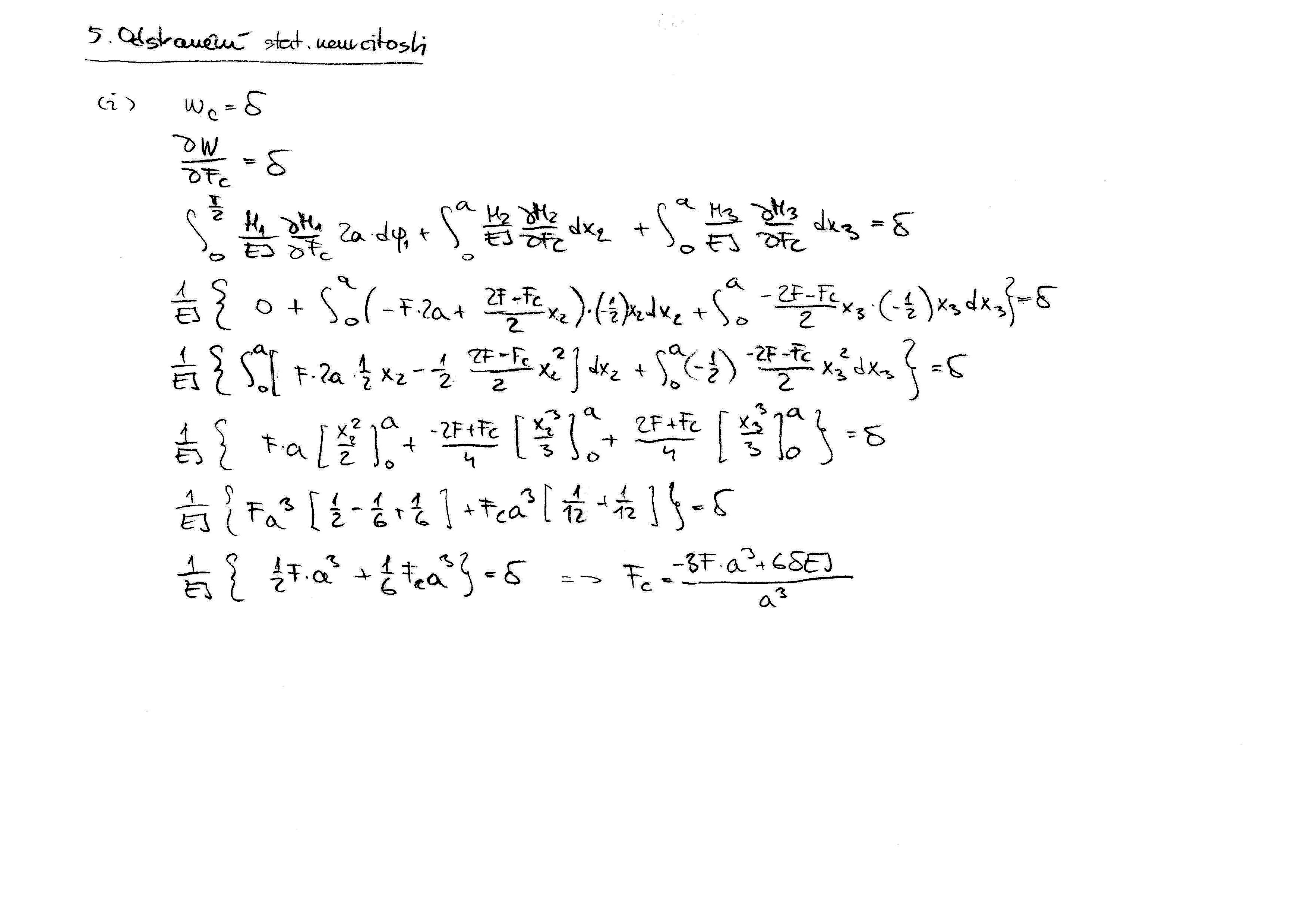
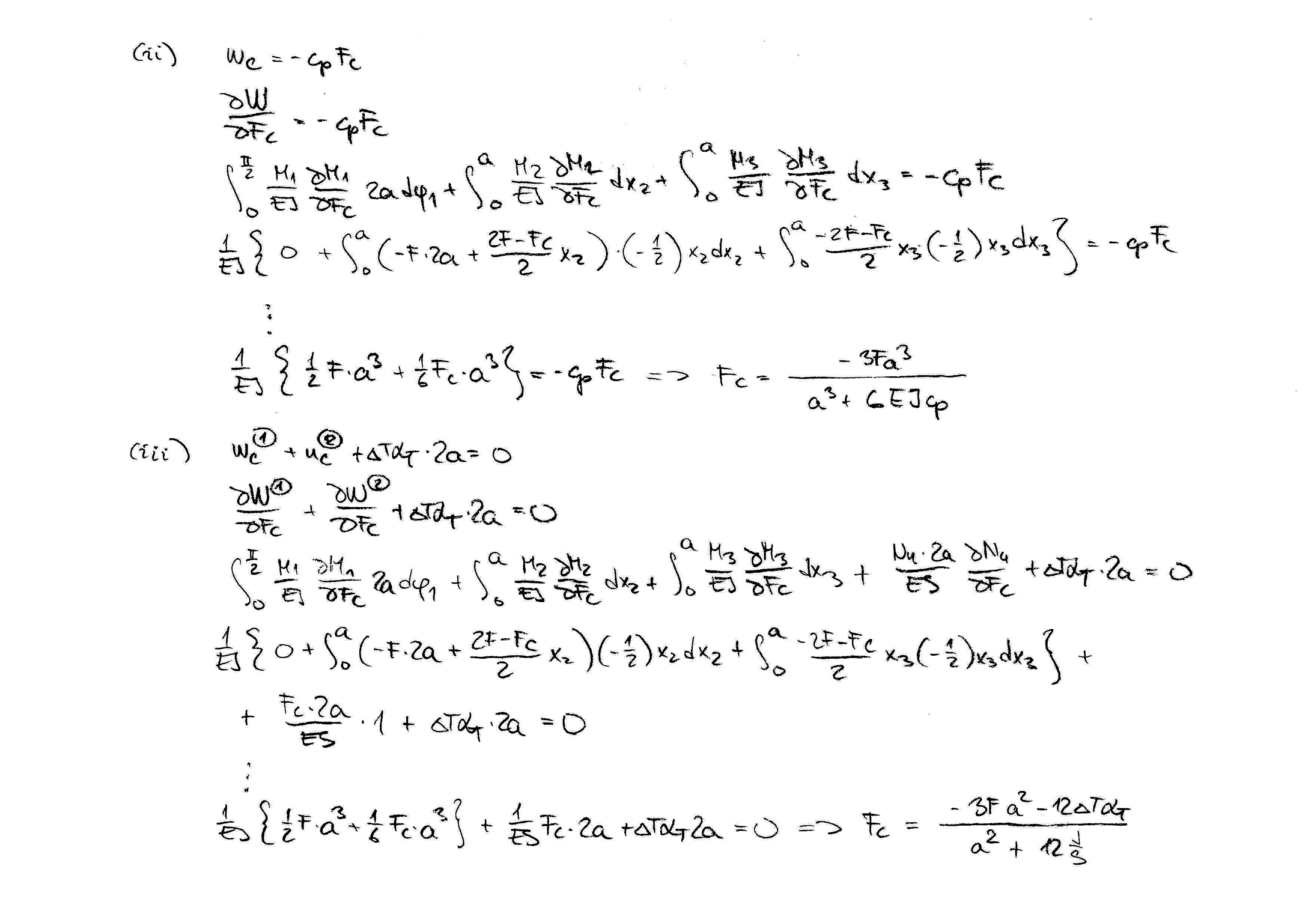
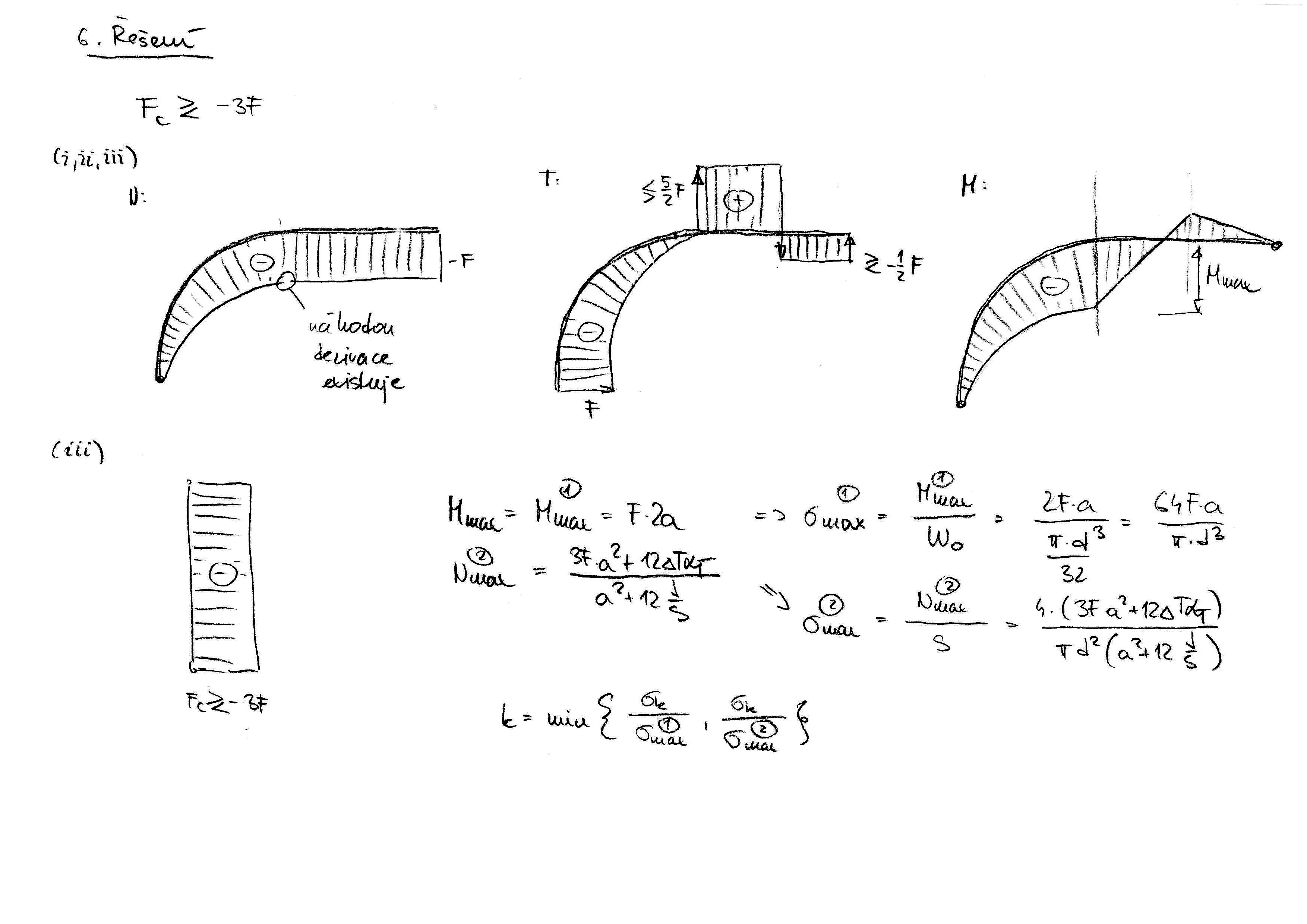
Příklady (\(\boldsymbol{2\times30}\) bodů) - dva příklady \(1\times\) staticky neurčitě uložených prutů nebo soustavy prutů zatížených prostým tahem/tlakem, ohybem nebo krutem.
Podklady ke stažení¶
Př.10-Prostý tah přímého prutu s volným koncem:
mp4,jpg,jpgPř.??,??-Prostý ohyb staticky určitě uložených přímých prutů:
mp4,mp4,jpg,jpg,jpg,jpgPř.??,??,??-Prostý ohyb staticky neurčitě uložených zalomených prutů:
mp4,jpg,jpg,jpg,jpg,jpg,jpgPř.??,??,??-Prostý ohyb soustavy přímého a zakřiveného prutu:
mp4,jpg,jpg,jpg,jpg,jpgPř.??,??,??-Prostý ohyb staticky neurčitě uložených zakřivených prutů:
mp4,jpg,jpg,jpg,jpg,jpg,jpgPř.??,??,??-Prostý ohyb staticky neurčitě uložených prutů:
mp4,jpg,jpg,jpg,jpg,jpg,jpg,jpg,jpg,jpg,jpgPř.??-Prostý krut (zatím bez komentáře):
zde.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Pružnost a pevnost II¶
Podobně jako v případě příkladů z Pružnosti a pevnosti I jsou ukázkové příklady z Pružnosti a pevnosti II ve formátu *.ipynb. Jde o soubory použitelné v systému Jupyter, který si můžete stáhnout na stránkách jupyter.org. Některé vztahy pro rotačně symetrická tělesa lze nalézt zde.
Cvičení 1: Kombinované namáhání.
Příklad v jazyce Python - Př.1. Odpovídající soubor v Jupyteru lze stáhnout
zde. Obrázek lze stáhnoutzde.Příklad v jazyce Python - Př.2. Odpovídající soubor v Jupyteru lze stáhnout
zde. Obrázek lze stáhnoutzdePříklad v jazyce Python - Př.3. Odpovídající soubor v Jupyteru lze stáhnout a
zde. Obrázek lze stáhnoutzde.Ručně řešený příklad Př.4 lze stáhnout
zde.Ručně řešený příklad Př.5 lze stáhnout
zde.Ručně řešený příklad Př.6 lze stáhnout
zde.Ručně řešený příklad Př.7 lze stáhnout
zde.
Cvičení 2: Napětí v bodě.
Příklad v jazyce Python - Př.1. Odpovídající soubor v Jupyteru lze stáhnout
zde.Příklad v jazyce Python - Př.2. Odpovídající soubor v Jupyteru lze stáhnout
zde.Ručně řešený příklad Př.3 lze stáhnout
zde.Ručně řešený příklad Př.4 lze stáhnout
zde.Ručně řešený příklad Př.5 lze stáhnout
zde.Ručně řešený příklad Př.6 lze stáhnout
zde.Ručně řešený příklad Př.7 lze stáhnout
zde.Ručně řešený příklad Př.8 lze stáhnout
zde.Ručně řešený příklad Př.9 lze stáhnout
zde.Ručně řešený příklad Př.10 lze stáhnout
zde.Ručně řešený příklad Př.11 lze stáhnout
zde.Ručně řešený příklad Př.12 lze stáhnout
zde.
Cvičení 3: Trhlina v prutu.
Cvičení 4: Cyklické zatěžování prutu.
Kratičký úvod lze stáhnout
zde.Ručně řešený příklad Př.1 lze stáhnout
zde.Ručně řešený příklad Př.2 lze stáhnout
zde.Ručně řešený příklad Př.3 lze stáhnout
zde.Ručně řešený příklad Př.4 lze stáhnout
zde.Ručně řešený příklad Př.5 lze stáhnout
zde.Ručně řešený příklad Př.6 lze stáhnout
zde.Ručně řešený příklad Př.7 lze stáhnout
zde.Ručně řešený příklad Př.8 lze stáhnout
zde.Ručně řešený příklad Př.9 lze stáhnout
zde.Ručně řešený příklad Př.10 lze stáhnout
zde.Ručně řešený příklad Př.11 lze stáhnout
zde.Ručně řešený příklad Př.12 lze stáhnout
zde.
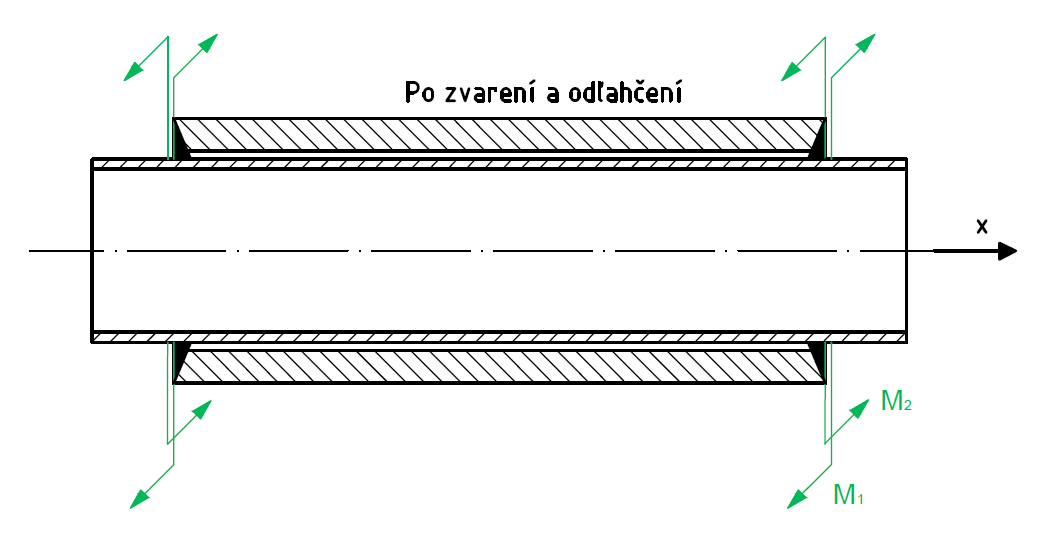
Cvičení 5: Válcové těleso.
Ručně řešený příklad Př.1 lze stáhnout
zde.Ručně řešený příklad Př.2 lze stáhnout
zde.Ručně řešený příklad Př.3 lze stáhnout
zde.Ručně řešený příklad Př.4 lze stáhnout
zde.Ručně řešený příklad Př.5 lze stáhnout
zde.Ručně řešený příklad Př.6 lze stáhnout
zde.Ručně řešený příklad Př.7 lze stáhnout
zde.
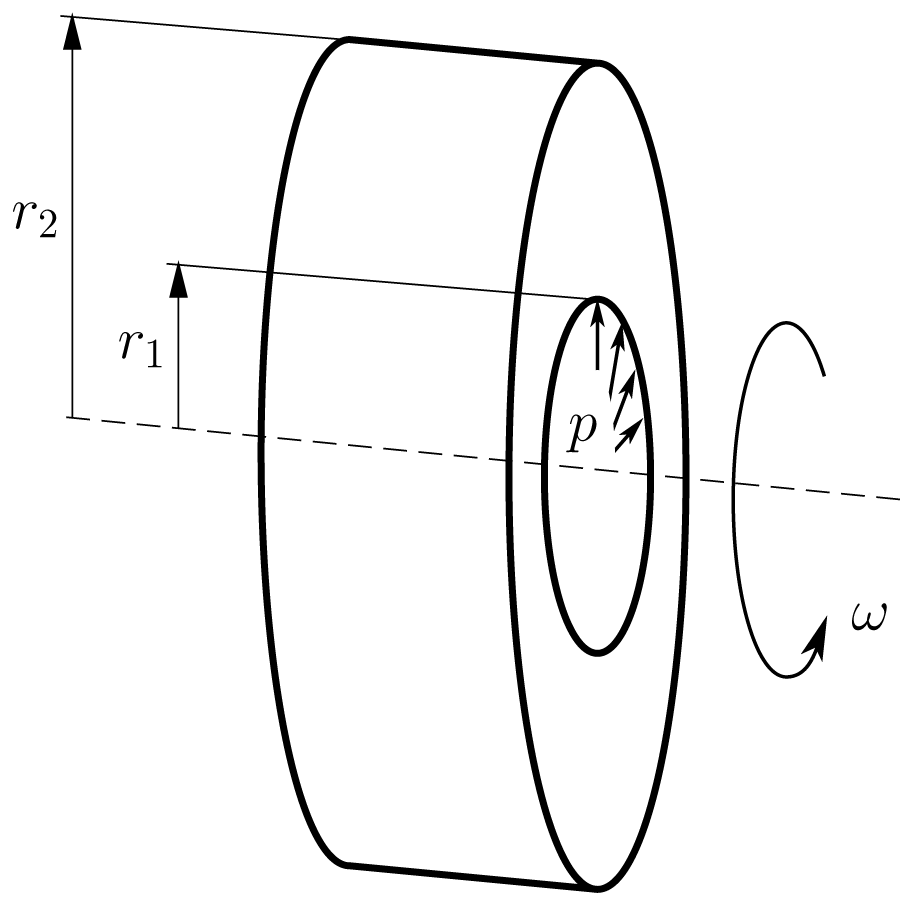
Cvičení 6: Rotující stěna.
Cvičení 7: Průhyb rotačně symetrické desky.
Příklad v jazyce Python - Př.1. Odpovídající soubor v Jupyteru lze stáhnout
zde. Obrázky lze stáhnoutzdeazde.Ručně řešený příklad Př.2 lze stáhnout
zde.Ručně řešený příklad Př.3 lze stáhnout
zde.Ručně řešený příklad Př.4 lze stáhnout
zde.Ručně řešený příklad Př.5 lze stáhnout
zde.Ručně řešený příklad Př.6 lze stáhnout
zde.Ručně řešený příklad Př.7 lze stáhnout
zde.
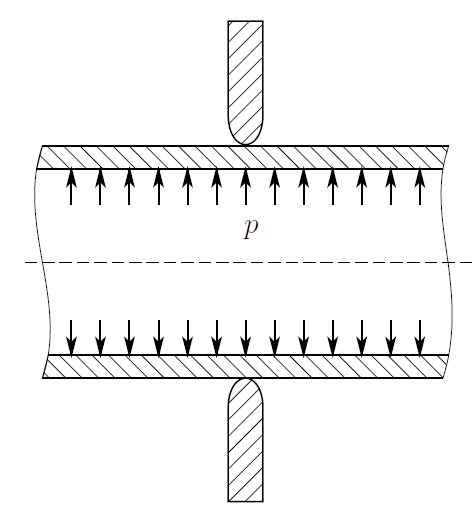
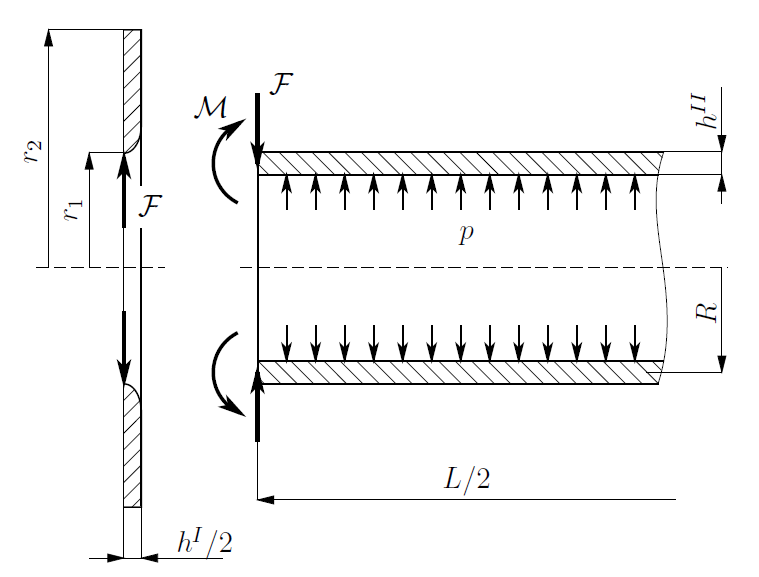
Cvičení 8: Dlouhá válcová skořepina.
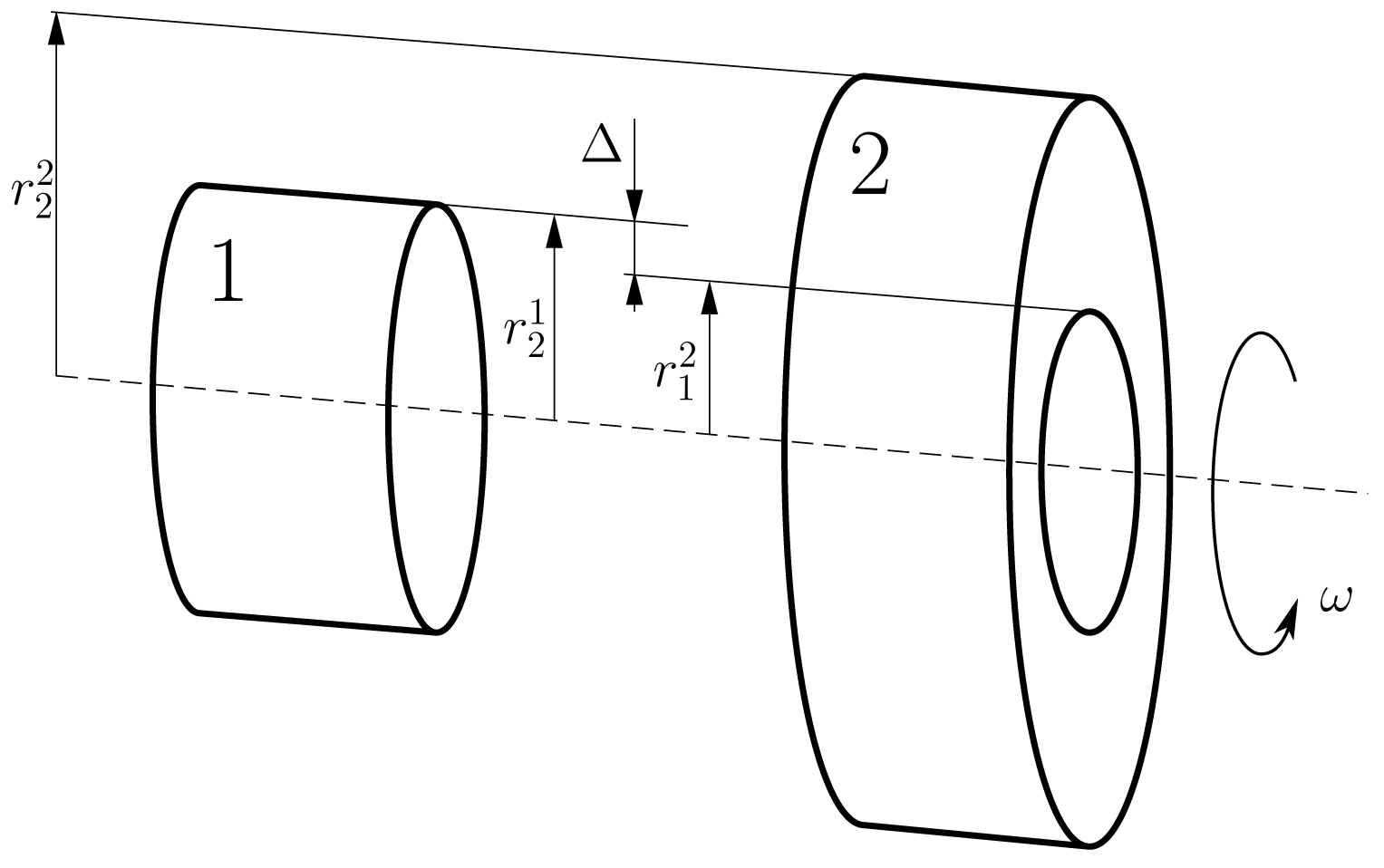
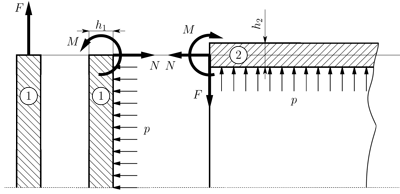
Cvičení 9: Složená tělesa.
Příklad v jazyce Python - Př.1. Odpovídající soubor v Jupyteru lze stáhnout
zde. Obrázky lze stáhnoutzdeazde.Příklad v jazyce Python - Př.2. Odpovídající soubor v Jupyteru lze stáhnout
zde. Obrázek lze stáhnoutzde.Ručně řešený příklad Př.3 lze stáhnout
zde.Ručně řešený příklad Př.4 lze stáhnout
zde.
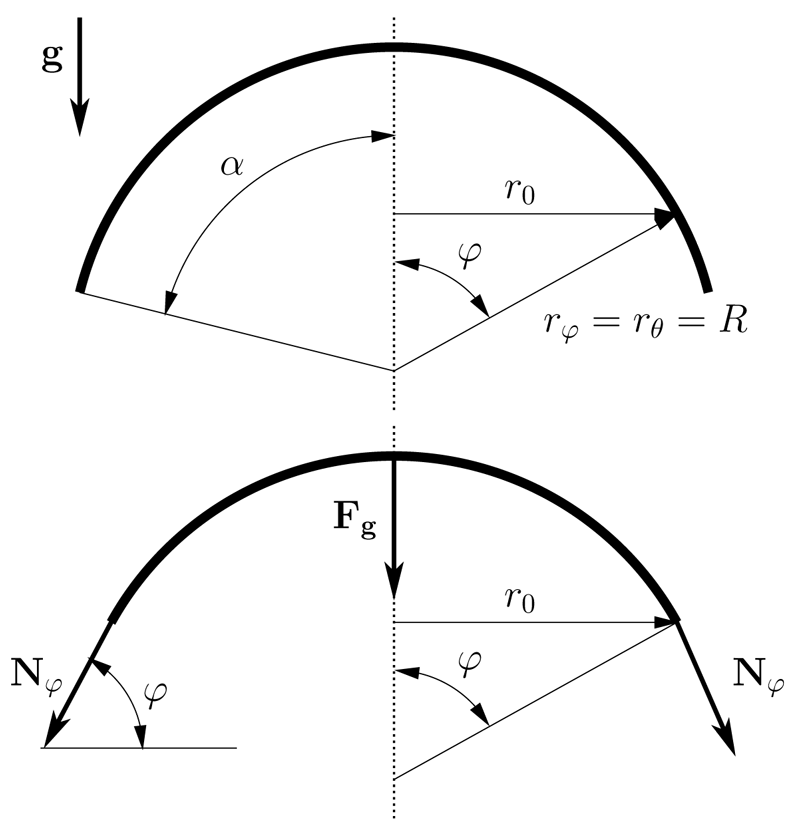
Cvičení 10: Bezmomentová skořepina.
Příklad v jazyce Python - Př.1. Odpovídající soubor v Jupyteru lze stáhnout
zde. Obrázek lze stáhnoutzde.Příklad v jazyce Python - Př.2. Odpovídající soubor v Jupyteru lze stáhnout
zde. Obrázky lze stáhnoutzdeazde.Ručně řešený příklad Př.3 lze stáhnout
zde.Ručně řešený příklad Př.4 lze stáhnout
zde.
Cvičení 11: Metoda konečných prvků v PPI a PPII.
Případ krutu prizmatického prutu s nekruhovým příčným průřezem počítaný v konečnoprvkovém systému FreeFEM++ si lze prohlédnout zde.
Případ eliptické tenké desky (membrány) se smíšenými okrajovými podmínkami počítaný v konečnoprvkovém systému FreeFEM++ si lze prohlédnout zde.
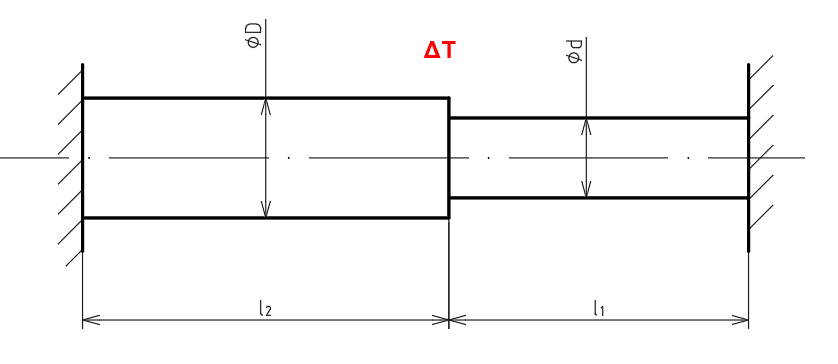
Případ prostého ohybu bi-materiálového prutu zatíženého změnou teploty počítaný v konečnoprvkovém systému FreeFEM++ si lze prohlédnout zde.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}